Static Public Member Functions | |
| static void | main (String[] args) throws Exception |
 Static Public Member Functions inherited from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR Static Public Member Functions inherited from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR | |
| static boolean | checkTaskSpaceTransform (AbstractKinematicsNR dev, TransformNR taskSpaceTransform, double seconds) |
| static boolean | checkTaskSpaceTransform (AbstractKinematicsNR dev, TransformNR taskSpaceTransform) |
Private Member Functions | |
| void | removeLimFromParallel (DHParameterKinematics limb) |
| void | loadConfigs (Element doc) |
| TransformNR | loadTransform (String tagname, Element e) |
| String | getname (Element e) |
| String | getParallelGroup (Element e) |
| String | getTag (Element e, String tagname) |
| void | loadLimb (Element doc, String tag, ArrayList< DHParameterKinematics > list) |
| void | loadVitamins (Element doc) |
| void | getVitamins (Element doc) |
| String | makeLimbTag (String xml, DHParameterKinematics l) |
| IDriveEngine | getWalkingDriveEngine () |
| void | fireBaseUpdates () |
| HashMap< String, ParallelGroup > | getParallelGroups () |
| void | addListeners (DHParameterKinematics kin) |
| void | fireIOnMobileBaseRenderChange () |
Detailed Description
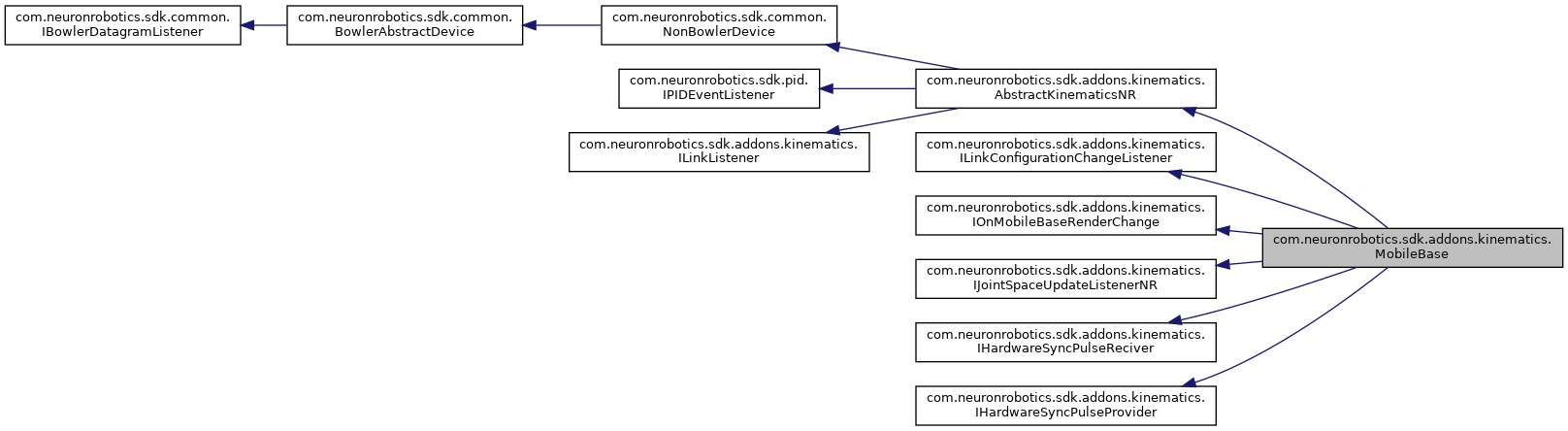
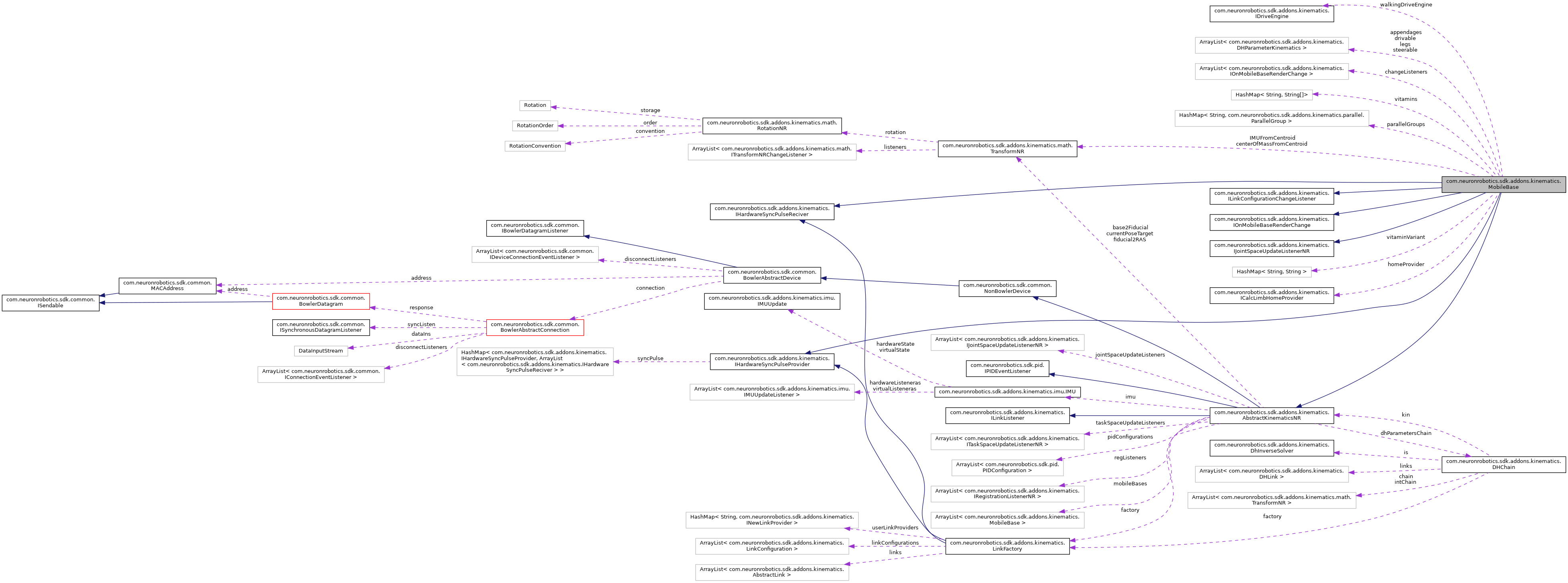
The Class MobileBase.
Definition at line 28 of file MobileBase.java.
Constructor & Destructor Documentation
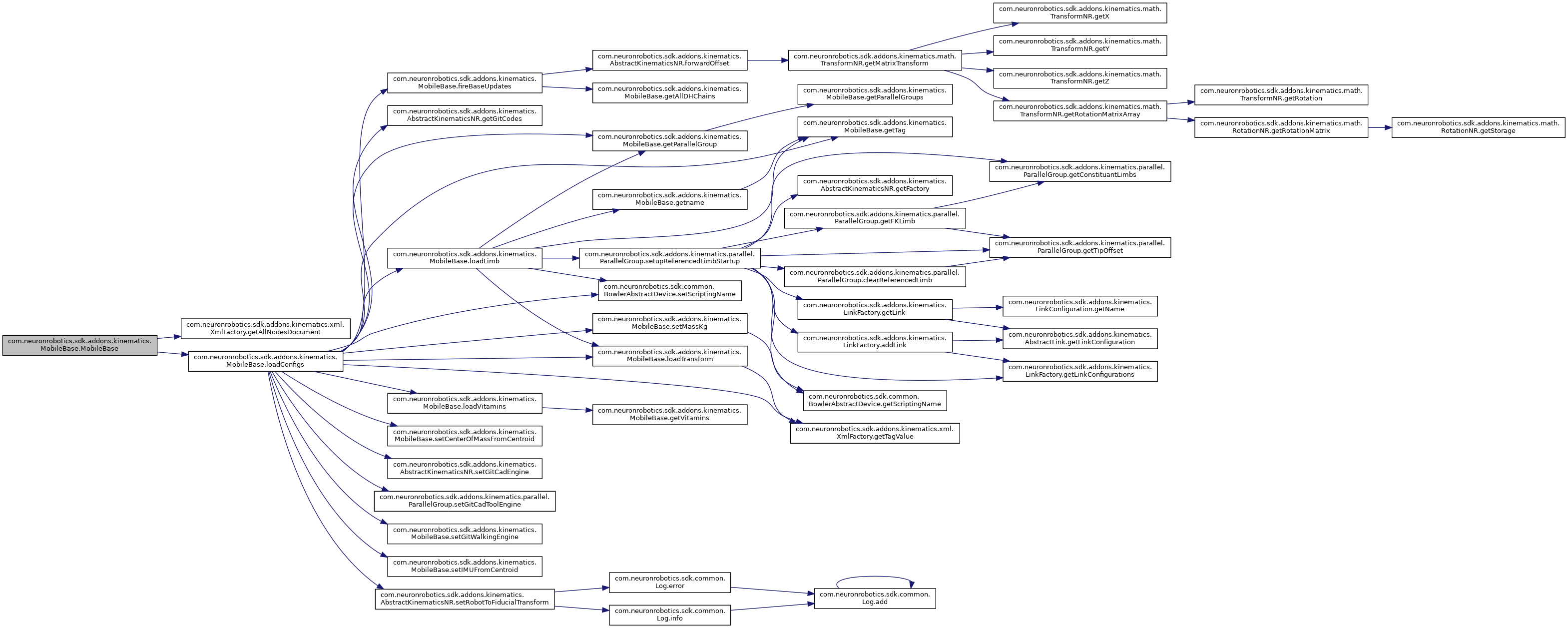
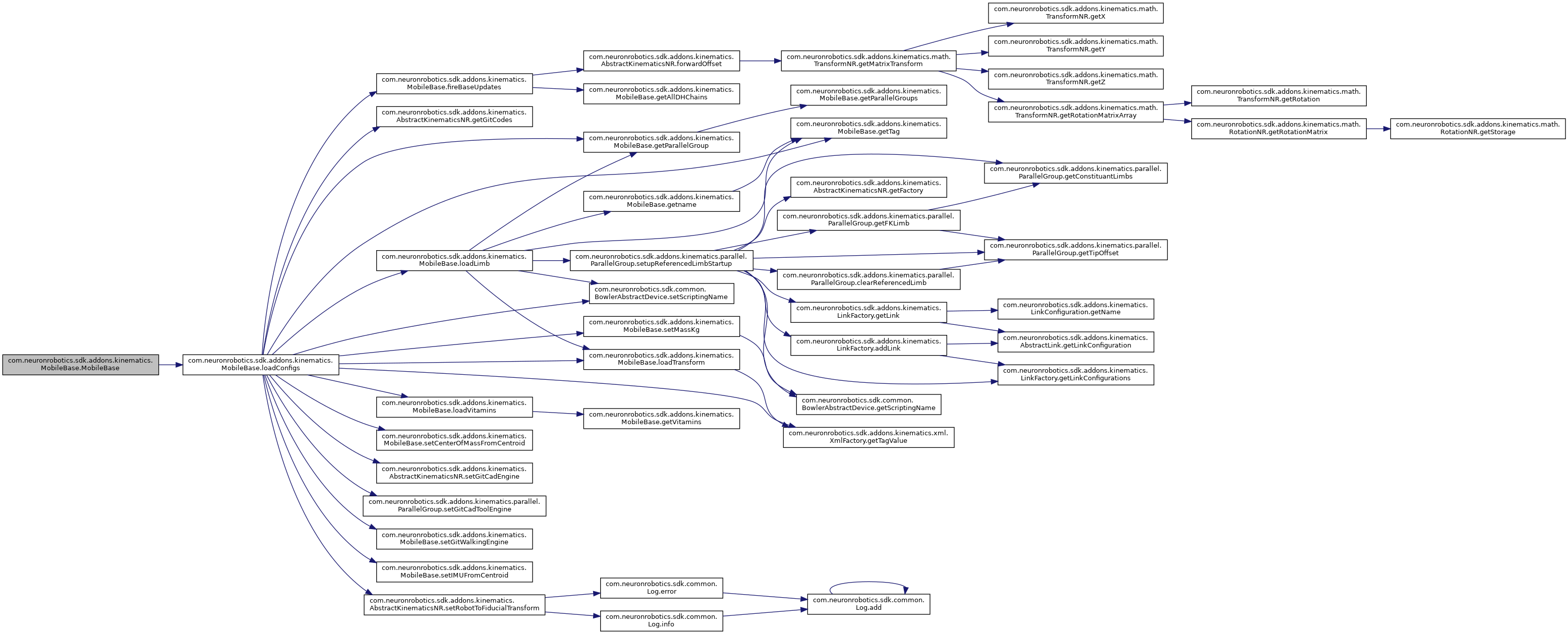
◆ MobileBase() [1/3]
| com.neuronrobotics.sdk.addons.kinematics.MobileBase.MobileBase | ( | ) |
Instantiates a new mobile base.
Definition at line 70 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.main().
◆ MobileBase() [2/3]
| com.neuronrobotics.sdk.addons.kinematics.MobileBase.MobileBase | ( | InputStream | configFile | ) |
Instantiates a new mobile base.
- Parameters
-
configFile the config file
Definition at line 138 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.xml.XmlFactory.getAllNodesDocument(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().
◆ MobileBase() [3/3]
| com.neuronrobotics.sdk.addons.kinematics.MobileBase.MobileBase | ( | Element | doc | ) |
Instantiates a new mobile base.
- Parameters
-
doc the doc
Definition at line 165 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().
Member Function Documentation
◆ addIOnMobileBaseRenderChange()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.addIOnMobileBaseRenderChange | ( | IOnMobileBaseRenderChange | l | ) |
Definition at line 967 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.changeListeners.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.addListeners(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.run().
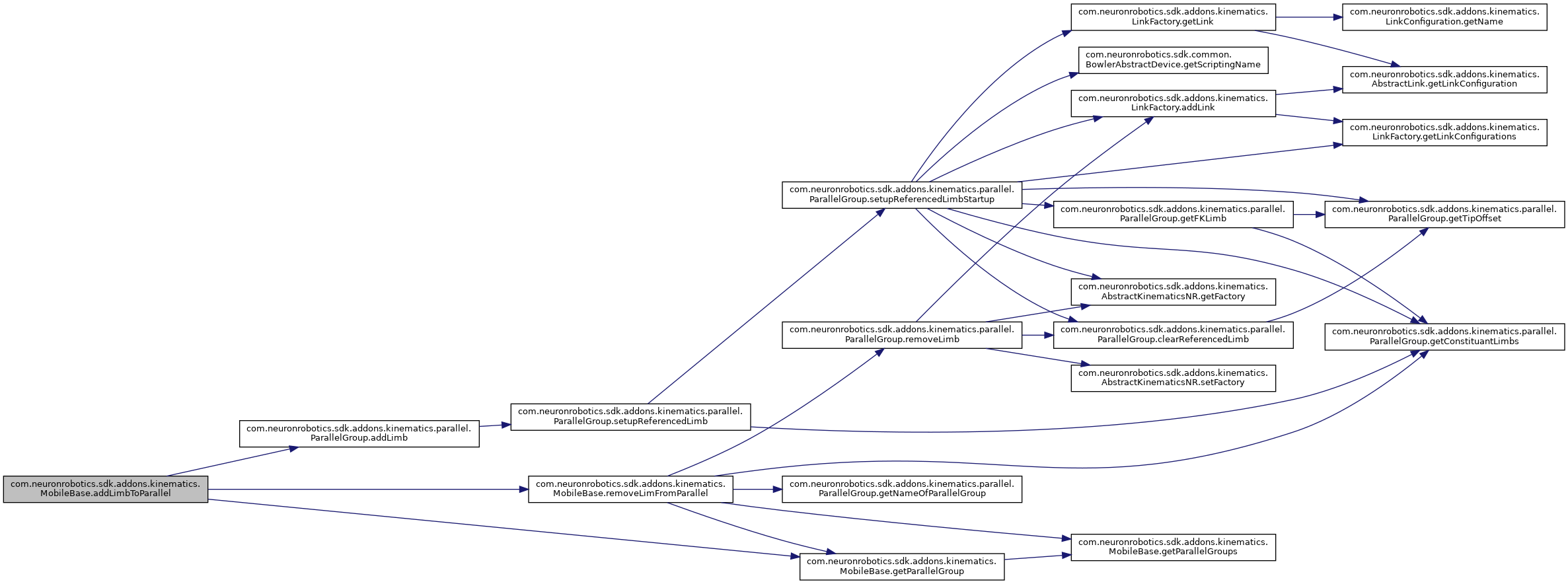
◆ addLimbToParallel()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.addLimbToParallel | ( | DHParameterKinematics | limb, |
| TransformNR | tipOffset, | ||
| String | name, | ||
| String | relativeLimb, | ||
| int | relativeIndex | ||
| ) |
Definition at line 203 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.addLimb(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroup(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.removeLimFromParallel().
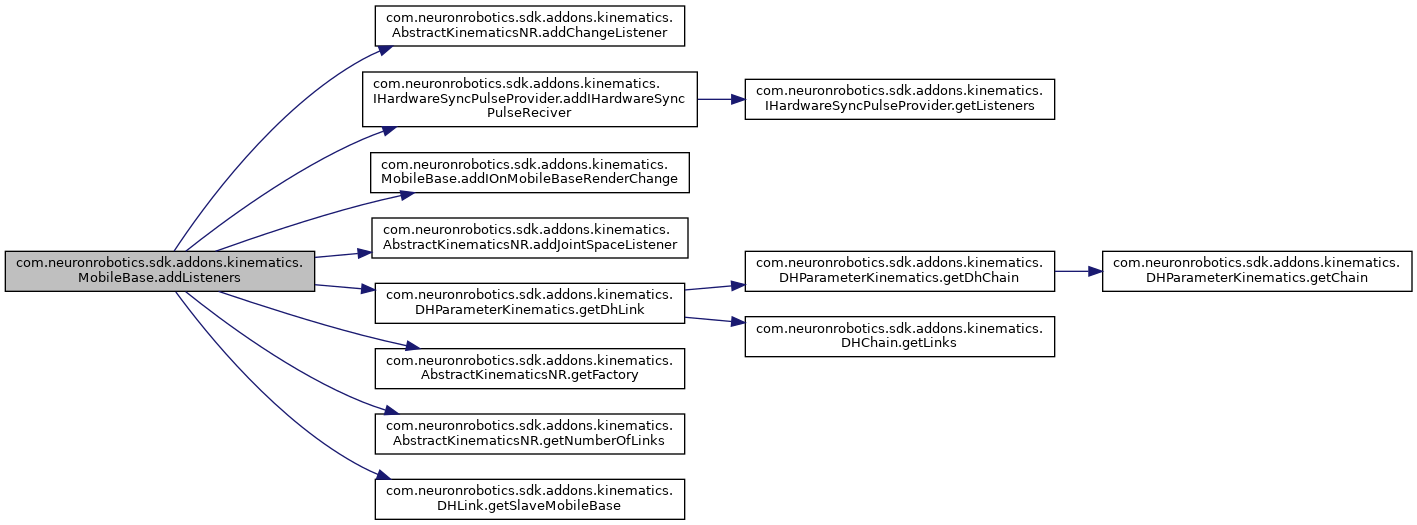
◆ addListeners()
|
private |
Definition at line 908 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.addChangeListener(), com.neuronrobotics.sdk.addons.kinematics.IHardwareSyncPulseProvider.addIHardwareSyncPulseReciver(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.addIOnMobileBaseRenderChange(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.addJointSpaceListener(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFactory(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getNumberOfLinks(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.getSlaveMobileBase().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.connect().
◆ calcHome()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.MobileBase.calcHome | ( | DHParameterKinematics | limb | ) |
Calc home.
- Returns
- the transform nr
Definition at line 78 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.calcHome(), com.neuronrobotics.sdk.addons.kinematics.ICalcLimbHomeProvider.calcHome(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.homeProvider.

◆ clearIOnMobileBaseRenderChange()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.clearIOnMobileBaseRenderChange | ( | ) |
Definition at line 978 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.changeListeners.
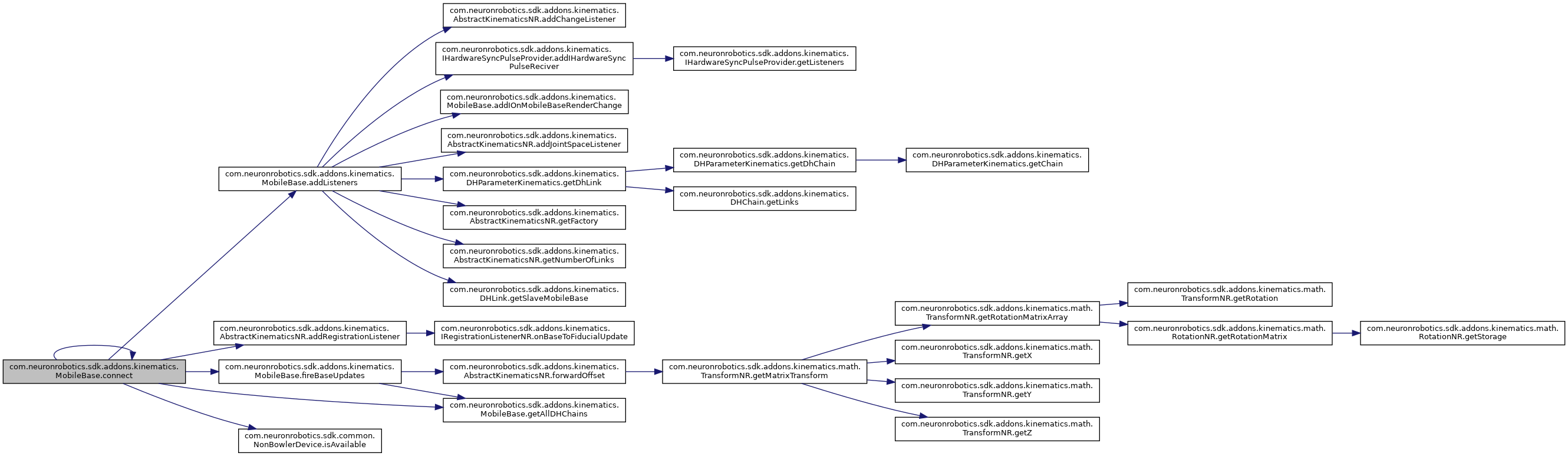
◆ connect()
| boolean com.neuronrobotics.sdk.addons.kinematics.MobileBase.connect | ( | ) |
This method tells the connection object to start and connects the up and down streams pipes. Once this method is called and returns without exception, the device is ready to communicate with
- Returns
- true, if successful
- Exceptions
-
InvalidConnectionException the invalid connection exception
Reimplemented from com.neuronrobotics.sdk.common.NonBowlerDevice.
Definition at line 880 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.addListeners(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.addRegistrationListener(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.connect(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.fireBaseUpdates(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAllDHChains(), and com.neuronrobotics.sdk.common.NonBowlerDevice.isAvailable().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.connect(), and com.neuronrobotics.bowlerstudio.BowlerKernel.processReturnedObjects().
◆ connectDevice()
| boolean com.neuronrobotics.sdk.addons.kinematics.MobileBase.connectDevice | ( | ) |
Connect device.
- Returns
- true, if successful
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Definition at line 428 of file MobileBase.java.
References com.neuronrobotics.sdk.common.Log.error(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAllDHChains().

◆ disconnectDevice()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.disconnectDevice | ( | ) |
This method tells the connection object to disconnect its pipes and close out the connection. Once this is called, it is safe to remove your device.
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Definition at line 415 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAllDHChains().

◆ DriveArc()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.DriveArc | ( | TransformNR | newPose, |
| double | seconds | ||
| ) |
Drive arc.
- Parameters
-
newPose the new pose seconds the seconds
Definition at line 757 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.IDriveEngine.DriveArc(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getWalkingDriveEngine(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.updatePositions().

◆ DriveVelocityArc()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.DriveVelocityArc | ( | double | degreesPerSecond, |
| double | cmRadius | ||
| ) |
Drive velocity arc.
- Parameters
-
degreesPerSecond the degrees per second cmRadius the cm radius
Definition at line 779 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.IDriveEngine.DriveVelocityArc(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getWalkingDriveEngine(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.updatePositions().

◆ DriveVelocityStraight()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.DriveVelocityStraight | ( | double | cmPerSecond | ) |
Drive velocity straight.
- Parameters
-
cmPerSecond the cm per second
Definition at line 767 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.IDriveEngine.DriveVelocityStraight(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getWalkingDriveEngine(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.updatePositions().

◆ event()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.event | ( | LinkConfiguration | newConf | ) |
Implements com.neuronrobotics.sdk.addons.kinematics.ILinkConfigurationChangeListener.
Definition at line 984 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.fireIOnMobileBaseRenderChange().

◆ fireBaseUpdates()
|
private |
Definition at line 863 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.forwardOffset(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAllDHChains().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.connect(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().

◆ fireIOnMobileBaseRenderChange()
|
private |
Definition at line 956 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.changeListeners, and com.neuronrobotics.sdk.addons.kinematics.IOnMobileBaseRenderChange.onIOnMobileBaseRenderChange().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.event(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.onIOnMobileBaseRenderChange(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.onJointSpaceUpdate(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.updatePositions().

◆ forwardKinematics()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.MobileBase.forwardKinematics | ( | double[] | jointSpaceVector | ) |
Forward kinematics.
- Parameters
-
jointSpaceVector the joint space vector
- Returns
- 6x1 vector in task space, unit in mm,radians [x,y,z,rotx,rotY,rotZ]
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Definition at line 457 of file MobileBase.java.
◆ getAllDHChains()
| ArrayList<DHParameterKinematics> com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAllDHChains | ( | ) |
Gets the all dh chains.
- Returns
- the all dh chains
Definition at line 485 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.appendages, com.neuronrobotics.sdk.addons.kinematics.MobileBase.drivable, com.neuronrobotics.sdk.addons.kinematics.MobileBase.legs, and com.neuronrobotics.sdk.addons.kinematics.MobileBase.steerable.
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager._generateStls(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.connect(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.connectDevice(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.disconnectDevice(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.fireBaseUpdates(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.generateBody(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.generateCad(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.loadJointPose(), com.neuronrobotics.bowlerstudio.sequence.TimeSequence.loadMobileBase(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.run(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.set(), com.neuronrobotics.bowlerstudio.creature.MobileBaseLoader.setDefaultWalkingEngine(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.setMobileBase(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateBase(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateMobileBase().
◆ getAllParallelGroups()
| ArrayList<DHParameterKinematics> com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAllParallelGroups | ( | ) |
Definition at line 184 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroup(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroupNames().
Referenced by com.neuronrobotics.bowlerstudio.sequence.TimeSequence.loadMobileBase().

◆ getAppendages()
| ArrayList<DHParameterKinematics> com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAppendages | ( | ) |
Gets the appendages.
- Returns
- the appendages
Definition at line 476 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.appendages.
Referenced by com.neuronrobotics.bowlerstudio.scripting.RobotHelper.getDefaultContents().
◆ getCenterOfMassFromCentroid()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.MobileBase.getCenterOfMassFromCentroid | ( | ) |
Definition at line 841 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.centerOfMassFromCentroid.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml().
◆ getDrivable()
| ArrayList<DHParameterKinematics> com.neuronrobotics.sdk.addons.kinematics.MobileBase.getDrivable | ( | ) |
Gets the drivable.
- Returns
- the drivable
Definition at line 728 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.drivable.
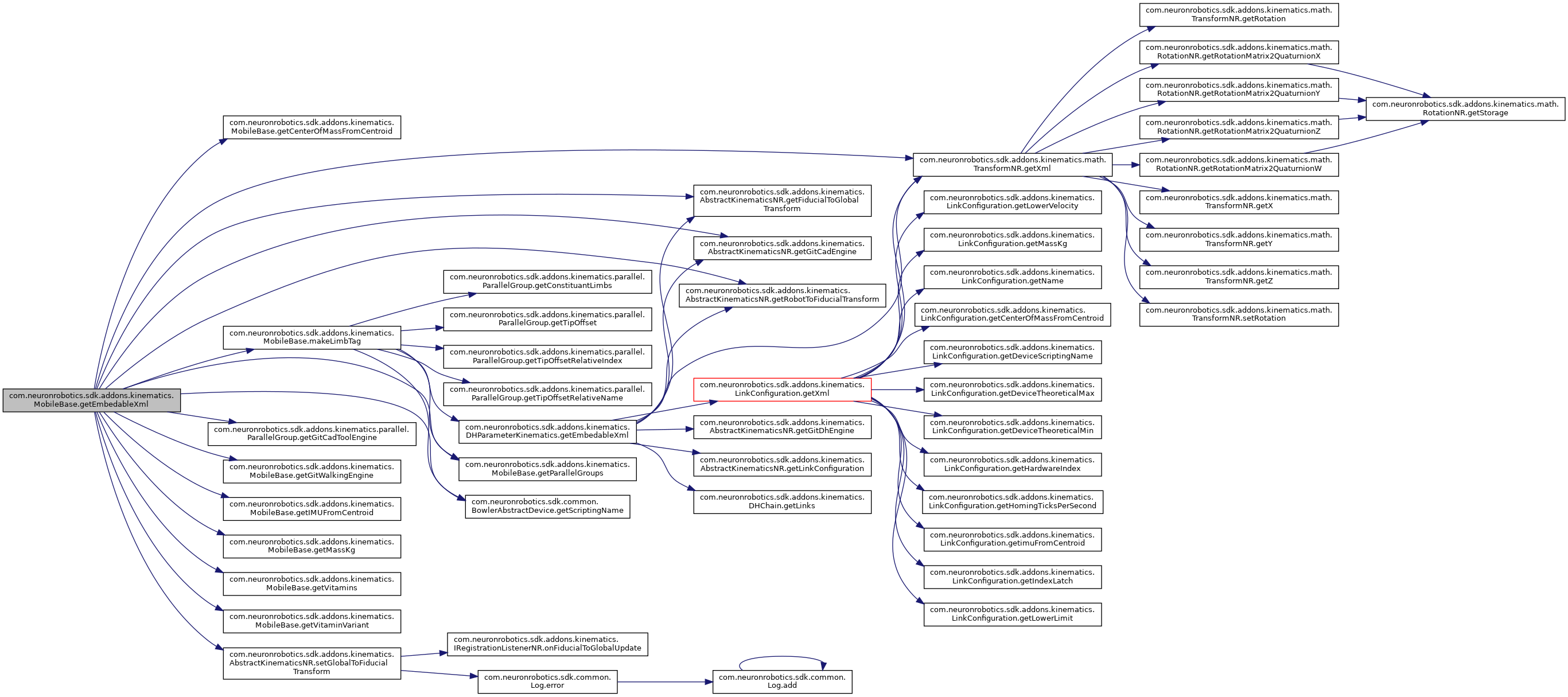
◆ getEmbedableXml()
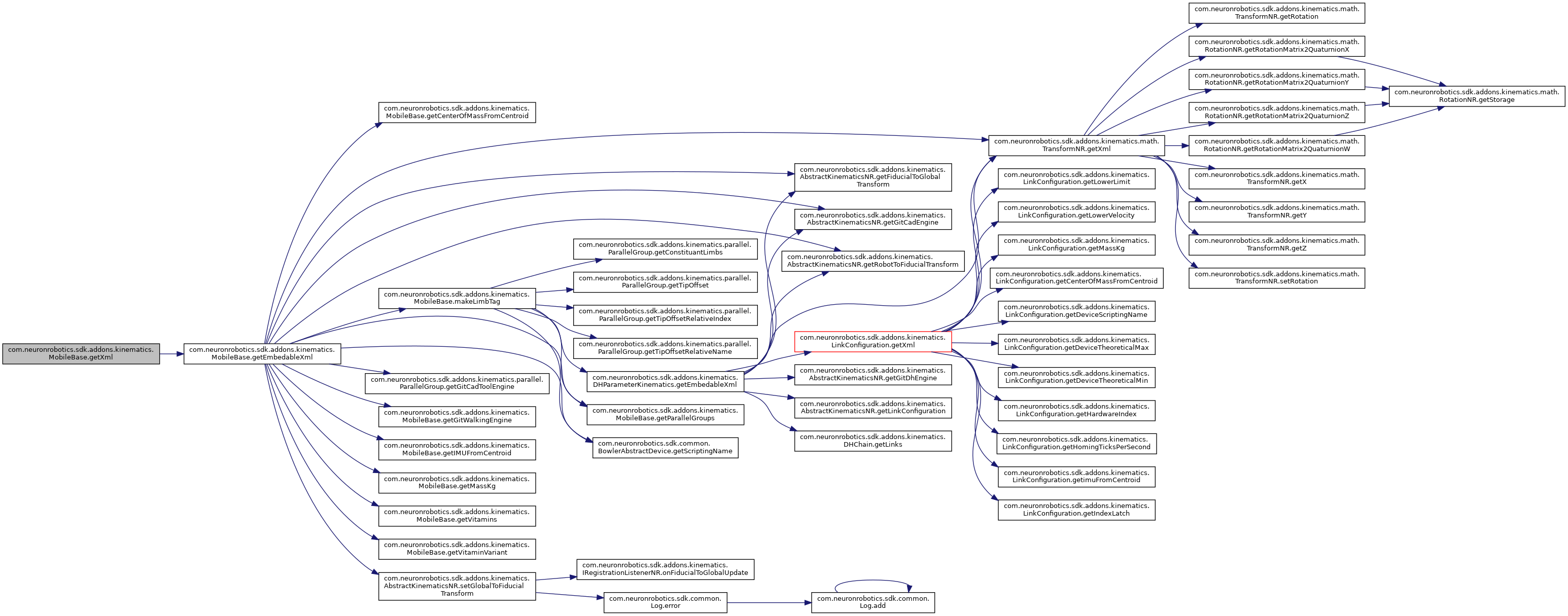
| String com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml | ( | ) |
Gets the embedable xml.
- Returns
- the embedable xml
Definition at line 617 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.appendages, com.neuronrobotics.sdk.addons.kinematics.MobileBase.drivable, com.neuronrobotics.sdk.addons.kinematics.MobileBase.getCenterOfMassFromCentroid(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFiducialToGlobalTransform(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getGitCadEngine(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getGitCadToolEngine(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getGitWalkingEngine(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getIMUFromCentroid(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getMassKg(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroups(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getRobotToFiducialTransform(), com.neuronrobotics.sdk.common.BowlerAbstractDevice.getScriptingName(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getVitamins(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getVitaminVariant(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getXml(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.legs, com.neuronrobotics.sdk.addons.kinematics.MobileBase.makeLimbTag(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setGlobalToFiducialTransform(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.steerable.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getXml(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.getXml().
◆ getGitSelfSource()
| String [] com.neuronrobotics.sdk.addons.kinematics.MobileBase.getGitSelfSource | ( | ) |
Gets the self source.
- Returns
- the self source
Definition at line 817 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.selfSource.
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.generateStls(), com.neuronrobotics.bowlerstudio.BowlerKernel.processReturnedObjects(), and com.neuronrobotics.bowlerstudio.creature.UserManagedPrintBed.UserManagedPrintBed().
◆ getGitWalkingEngine()
| String [] com.neuronrobotics.sdk.addons.kinematics.MobileBase.getGitWalkingEngine | ( | ) |
Gets the walking engine.
- Returns
- the walking engine
Definition at line 798 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.walkingEngine.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseLoader.setDefaultWalkingEngine().
◆ getIMUFromCentroid()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.MobileBase.getIMUFromCentroid | ( | ) |
Definition at line 849 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.IMUFromCentroid.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.pose().
◆ getLegs()
| ArrayList<DHParameterKinematics> com.neuronrobotics.sdk.addons.kinematics.MobileBase.getLegs | ( | ) |
Gets the legs.
- Returns
- the legs
Definition at line 467 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.legs.
Referenced by com.neuronrobotics.sdk.addons.kinematics.WalkingDriveEngine.DriveArc().
◆ getMassKg()
| double com.neuronrobotics.sdk.addons.kinematics.MobileBase.getMassKg | ( | ) |
Definition at line 832 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.mass.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), and com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().
◆ getname()
|
private |
Gets the name.
- Parameters
-
e the e tag the tag
- Returns
- the name
Definition at line 312 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.getTag().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadLimb().

◆ getParallelGroup() [1/3]
| ParallelGroup com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroup | ( | DHParameterKinematics | limb | ) |
Definition at line 192 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroup(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroupNames().

◆ getParallelGroup() [2/3]
|
private |
Gets the contents in the group.
- Parameters
-
e the e tag the tag
- Returns
- the name
Definition at line 326 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.getTag().

◆ getParallelGroup() [3/3]
| ParallelGroup com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroup | ( | String | name | ) |
Definition at line 171 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroups().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.addLimbToParallel(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAllParallelGroups(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroup(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadLimb(), com.neuronrobotics.bowlerstudio.sequence.TimeSequence.loadMobileBase(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.main(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.removeLimFromParallel().

◆ getParallelGroupNames()
| Set<String> com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroupNames | ( | ) |
Definition at line 180 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroups().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAllParallelGroups(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroup().

◆ getParallelGroups()
|
private |
Definition at line 875 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.parallelGroups.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroup(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroupNames(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.initializeParalellGroups(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.makeLimbTag(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.removeLimFromParallel().
◆ getSteerable()
| ArrayList<DHParameterKinematics> com.neuronrobotics.sdk.addons.kinematics.MobileBase.getSteerable | ( | ) |
Gets the steerable.
- Returns
- the steerable
Definition at line 719 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.steerable.
◆ getTag()
|
private |
Gets the localTag
- Parameters
-
e the e tag the tag
- Returns
- the name
Definition at line 337 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getname(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroup(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadLimb().
◆ getTipLocations()
| HashMap<DHParameterKinematics, TransformNR> com.neuronrobotics.sdk.addons.kinematics.MobileBase.getTipLocations | ( | ) |
Definition at line 86 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.calcHome(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.legs.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.pose(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.poseAroundPoint().

◆ getVitamins() [1/2]
| HashMap<String, String[]> com.neuronrobotics.sdk.addons.kinematics.MobileBase.getVitamins | ( | ) |
Definition at line 524 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.vitamins.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadVitamins(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.setVitamin().
◆ getVitamins() [2/2]
|
private |
Gets the vitamins.
- Parameters
-
doc the doc
Definition at line 533 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.xml.XmlFactory.getTagValue(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.setVitamin(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.setVitaminVariant().

◆ getVitaminVariant()
| String com.neuronrobotics.sdk.addons.kinematics.MobileBase.getVitaminVariant | ( | String | name | ) |
Get a purchaing code for a vitamin
- Parameters
-
name name of vitamin
- Returns
Definition at line 588 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.vitaminVariant.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml().
◆ getWalkingDriveEngine()
|
private |
Gets the walking drive engine.
- Returns
- the walking drive engine
Definition at line 737 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.walkingDriveEngine.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.DriveArc(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.DriveVelocityArc(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.DriveVelocityStraight().
◆ getXml()
| String com.neuronrobotics.sdk.addons.kinematics.MobileBase.getXml | ( | ) |
Gets the xml.
- Returns
- the xml
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Definition at line 601 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml().
Referenced by com.neuronrobotics.bowlerstudio.scripting.RobotHelper.getDefaultContents(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.main().
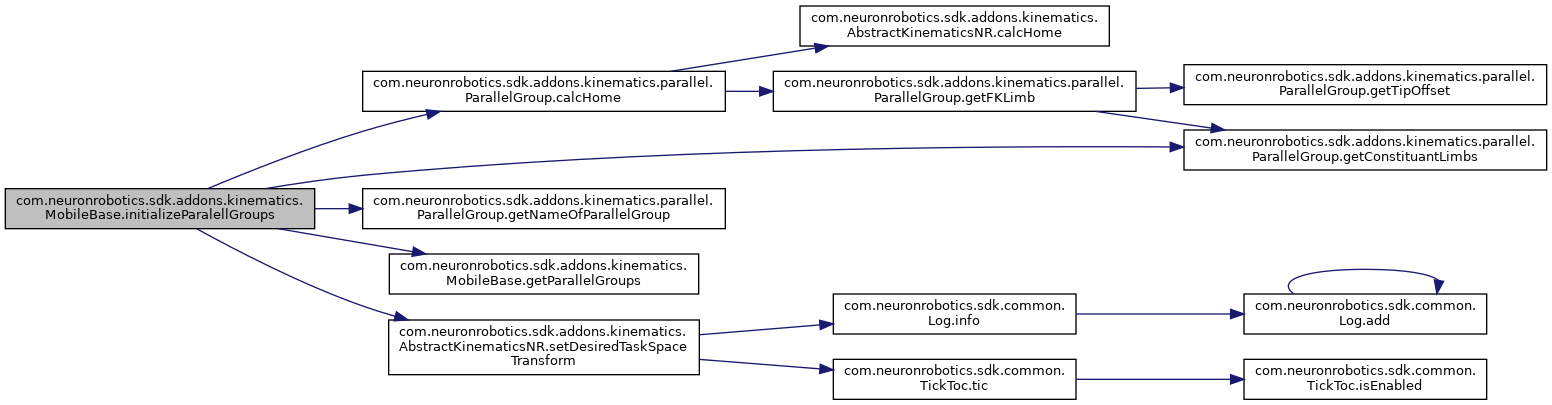
◆ initializeParalellGroups()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.initializeParalellGroups | ( | ) |
Definition at line 261 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.calcHome(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getNameOfParallelGroup(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroups(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDesiredTaskSpaceTransform().
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseLoader.MobileBaseLoader().
◆ inverseKinematics()
| double [] com.neuronrobotics.sdk.addons.kinematics.MobileBase.inverseKinematics | ( | TransformNR | taskSpaceTransform | ) | throws Exception |
Inverse kinematics.
- Parameters
-
taskSpaceTransform the task space transform
- Returns
- Nx1 vector in task space, in mm where N is number of links
- Exceptions
-
Exception the exception
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Definition at line 445 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getNumberOfLinks().

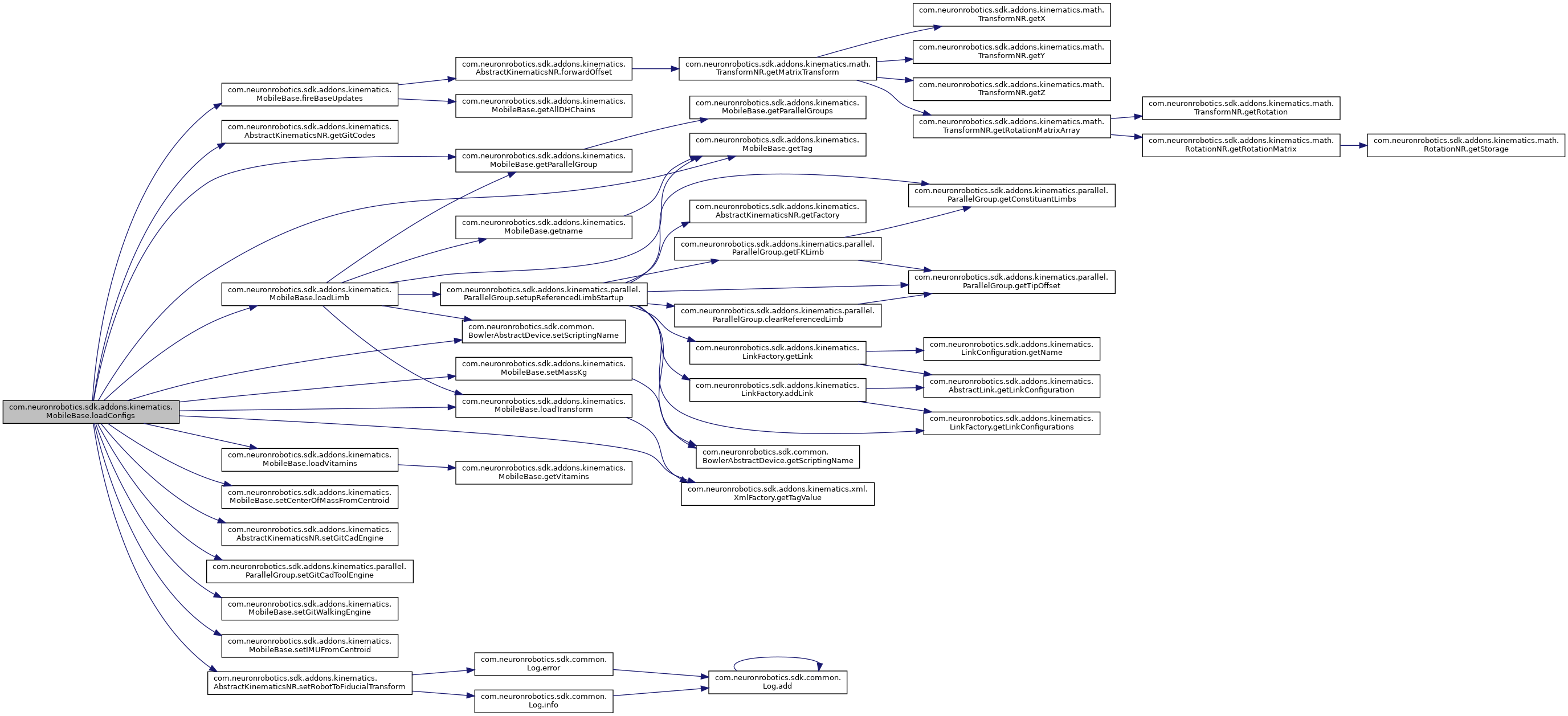
◆ loadConfigs()
|
private |
Load configs.
- Parameters
-
doc the doc
Definition at line 225 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.appendages, com.neuronrobotics.sdk.addons.kinematics.MobileBase.drivable, com.neuronrobotics.sdk.addons.kinematics.MobileBase.fireBaseUpdates(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getGitCodes(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroup(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getTag(), com.neuronrobotics.sdk.addons.kinematics.xml.XmlFactory.getTagValue(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.legs, com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadLimb(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadTransform(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadVitamins(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.setCenterOfMassFromCentroid(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setGitCadEngine(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setGitCadToolEngine(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.setGitWalkingEngine(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.setIMUFromCentroid(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.setMassKg(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setRobotToFiducialTransform(), com.neuronrobotics.sdk.common.BowlerAbstractDevice.setScriptingName(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.steerable.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.MobileBase().
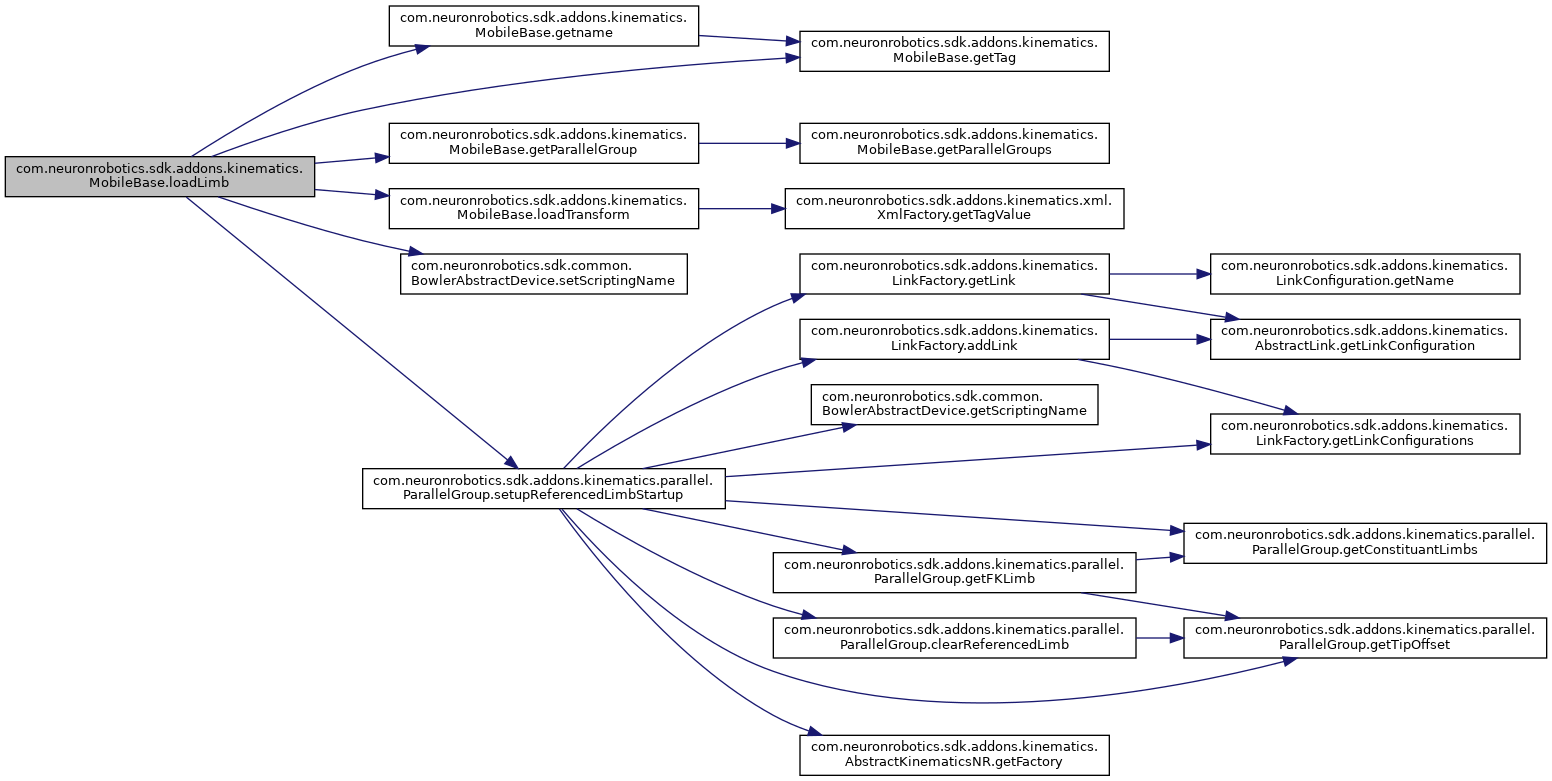
◆ loadLimb()
|
private |
Load limb.
- Parameters
-
doc the doc tag the tag list the list
Definition at line 366 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.getname(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroup(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getTag(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadTransform(), com.neuronrobotics.sdk.common.BowlerAbstractDevice.setScriptingName(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().
◆ loadTransform()
|
private |
Definition at line 279 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.xml.XmlFactory.getTagValue().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadLimb().

◆ loadVitamins()
|
private |
Load limb.
- Parameters
-
doc the doc tag the tag list the list
Definition at line 510 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.getVitamins().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().

◆ main()
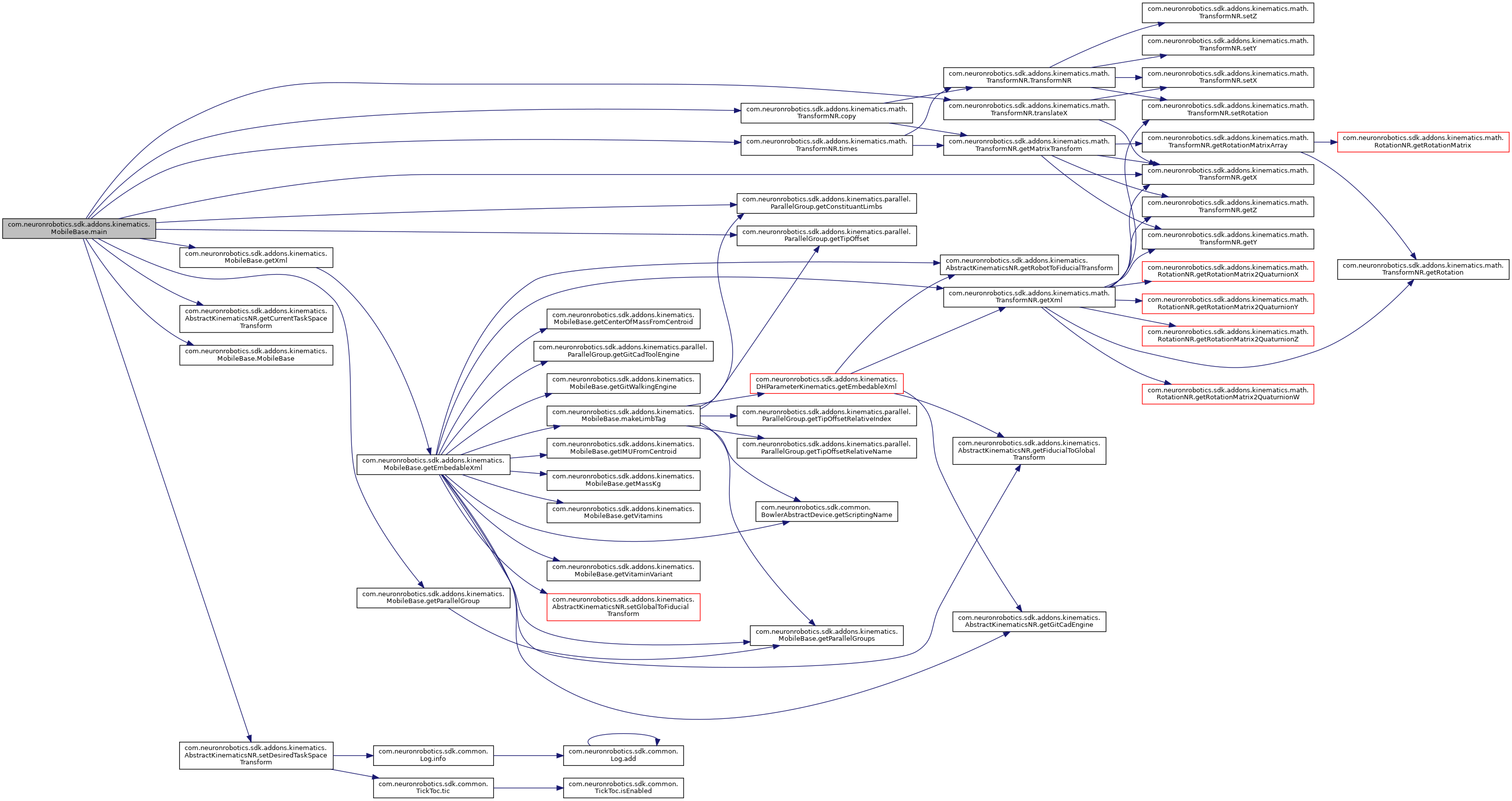
|
static |
Definition at line 922 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.copy(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentTaskSpaceTransform(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroup(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffset(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getX(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getXml(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.MobileBase(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDesiredTaskSpaceTransform(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.times(), and com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.translateX().
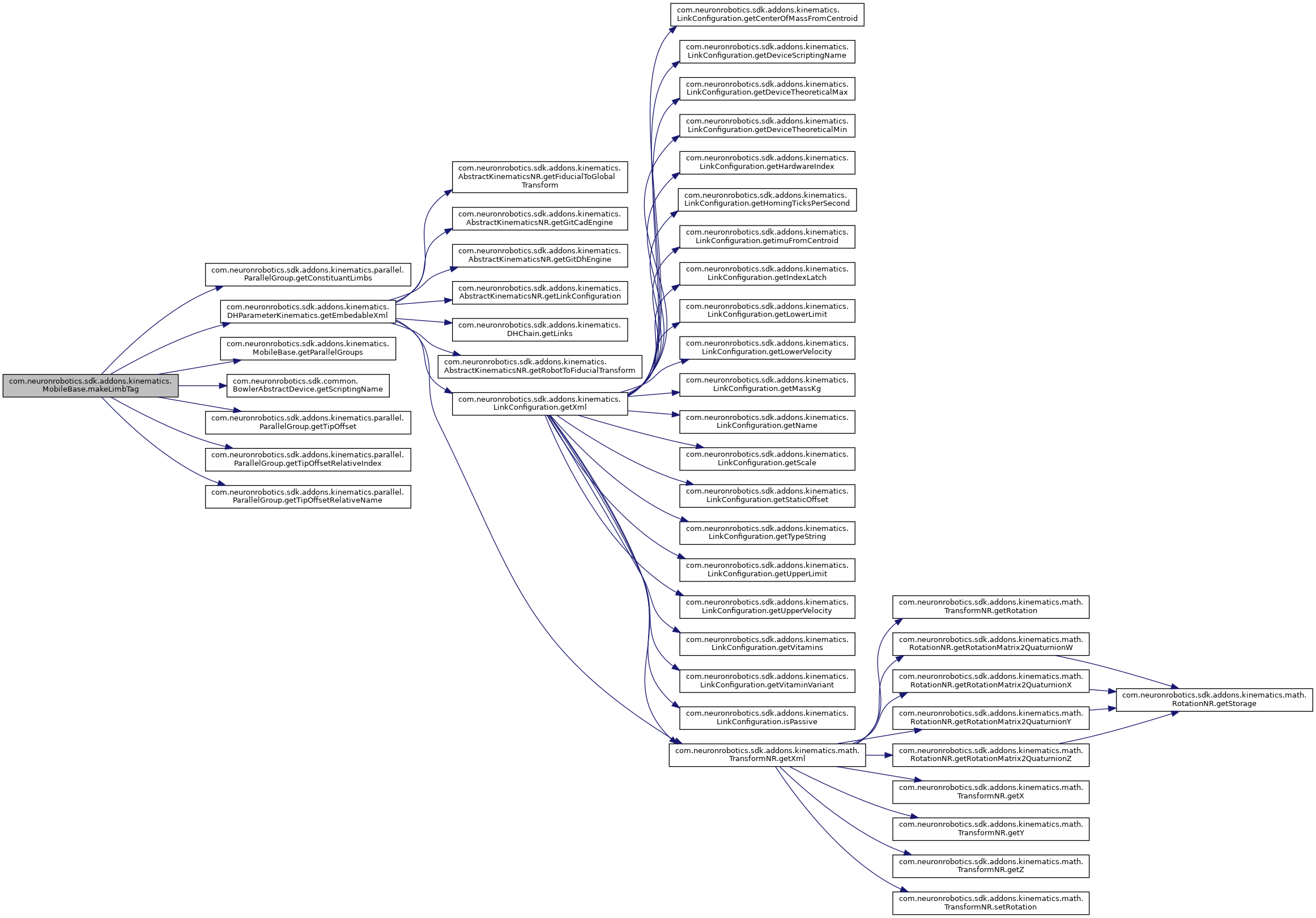
◆ makeLimbTag()
|
private |
Definition at line 694 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getEmbedableXml(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroups(), com.neuronrobotics.sdk.common.BowlerAbstractDevice.getScriptingName(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffset(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffsetRelativeIndex(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffsetRelativeName().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml().
◆ onIOnMobileBaseRenderChange()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.onIOnMobileBaseRenderChange | ( | ) |
Implements com.neuronrobotics.sdk.addons.kinematics.IOnMobileBaseRenderChange.
Definition at line 990 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.fireIOnMobileBaseRenderChange().

◆ onJointSpaceLimit()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.onJointSpaceLimit | ( | AbstractKinematicsNR | source, |
| int | axis, | ||
| JointLimit | event | ||
| ) |
The JointSpace limit This is called when the kinematics model has a new set of pose data.
- Parameters
-
source The AbstractKinematics object that the update was called from axis the axis event the event
Implements com.neuronrobotics.sdk.addons.kinematics.IJointSpaceUpdateListenerNR.
Definition at line 1008 of file MobileBase.java.
◆ onJointSpaceTargetUpdate()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.onJointSpaceTargetUpdate | ( | AbstractKinematicsNR | source, |
| double[] | joints | ||
| ) |
The JointSpace update event This is called when the kinematics model has a new set of pose data.
- Parameters
-
source The AbstractKinematics object that the update was called from joints the current joint space values mm,radians
Implements com.neuronrobotics.sdk.addons.kinematics.IJointSpaceUpdateListenerNR.
Definition at line 1002 of file MobileBase.java.
◆ onJointSpaceUpdate()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.onJointSpaceUpdate | ( | AbstractKinematicsNR | source, |
| double[] | joints | ||
| ) |
The JointSpace update event This is called when the kinematics model has a new set of pose data.
- Parameters
-
source The AbstractKinematics object that the update was called from joints the current joint space values mm,radians
Implements com.neuronrobotics.sdk.addons.kinematics.IJointSpaceUpdateListenerNR.
Definition at line 996 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.fireIOnMobileBaseRenderChange().

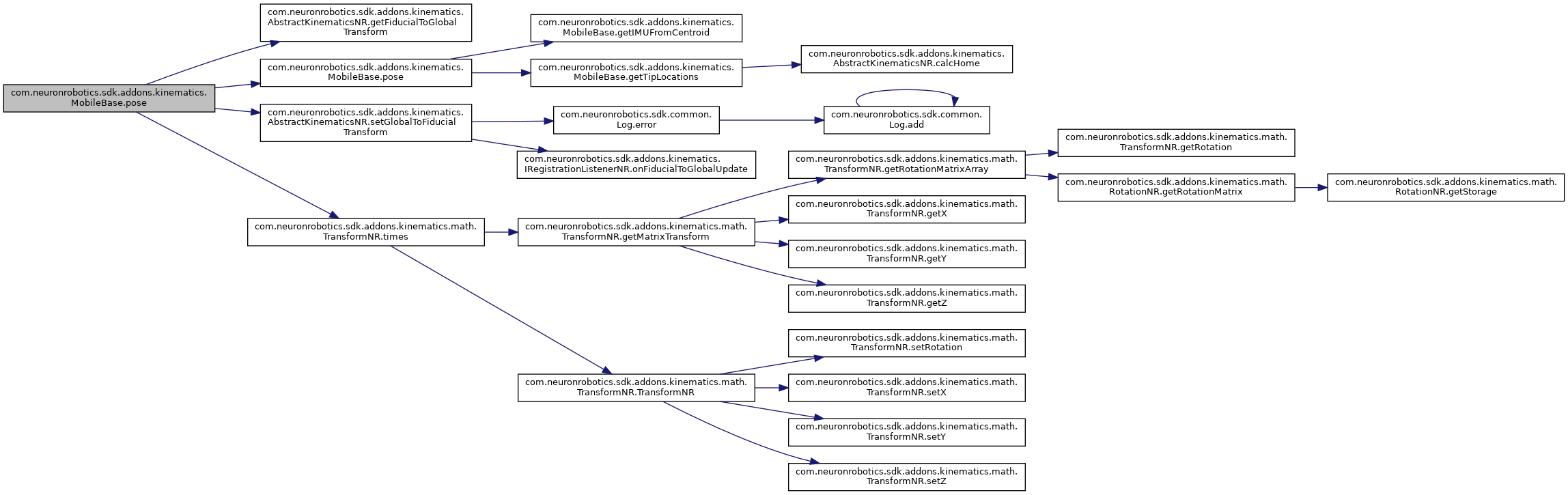
◆ pose() [1/2]
| boolean com.neuronrobotics.sdk.addons.kinematics.MobileBase.pose | ( | TransformNR | newAbsolutePose | ) | throws Exception |
Definition at line 97 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.getIMUFromCentroid(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.getTipLocations().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.pose(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.poseAroundPoint().

◆ pose() [2/2]
| boolean com.neuronrobotics.sdk.addons.kinematics.MobileBase.pose | ( | TransformNR | newAbsolutePose, |
| TransformNR | around, | ||
| HashMap< DHParameterKinematics, TransformNR > | tipList | ||
| ) | throws Exception |
Definition at line 109 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFiducialToGlobalTransform(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.legs, com.neuronrobotics.sdk.addons.kinematics.MobileBase.pose(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setGlobalToFiducialTransform(), and com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.times().
◆ poseAroundPoint()
| boolean com.neuronrobotics.sdk.addons.kinematics.MobileBase.poseAroundPoint | ( | TransformNR | newAbsolutePose, |
| TransformNR | around | ||
| ) | throws Exception |
Definition at line 103 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.getTipLocations(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.pose().

◆ removeIOnMobileBaseRenderChange()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.removeIOnMobileBaseRenderChange | ( | IOnMobileBaseRenderChange | l | ) |
Definition at line 973 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.changeListeners.
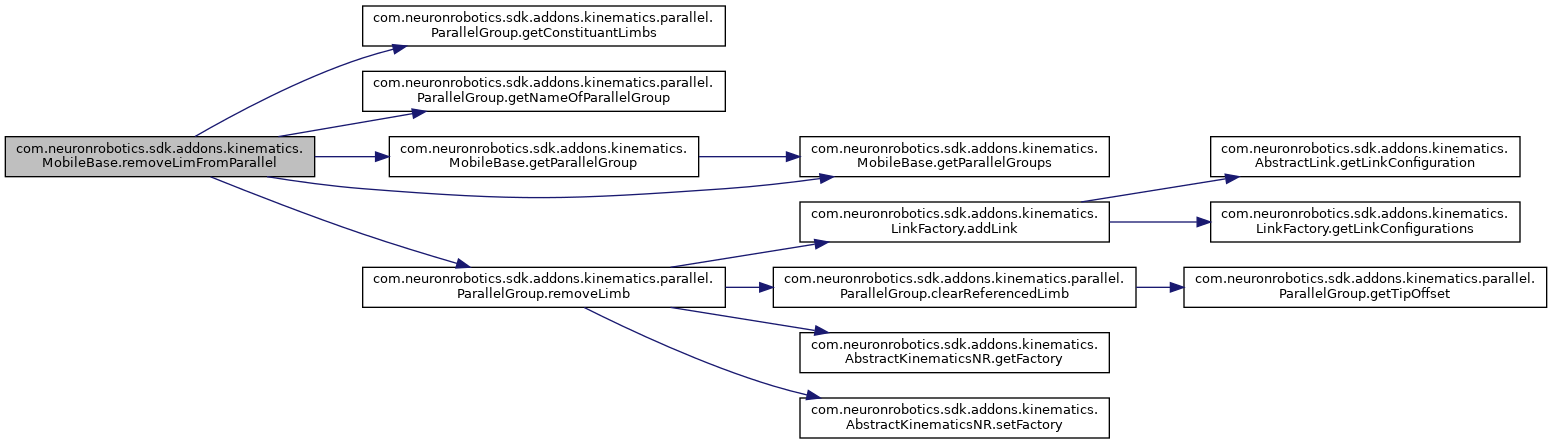
◆ removeLimFromParallel()
|
private |
Definition at line 210 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getNameOfParallelGroup(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroup(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroups(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.removeLimb().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.addLimbToParallel().
◆ setCenterOfMassFromCentroid()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.setCenterOfMassFromCentroid | ( | TransformNR | centerOfMassFromCentroid | ) |
Definition at line 845 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.centerOfMassFromCentroid.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().
◆ setFiducialToGlobalTransform()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.setFiducialToGlobalTransform | ( | TransformNR | globe | ) |
Definition at line 857 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setGlobalToFiducialTransform().
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().

◆ setGitSelfSource()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.setGitSelfSource | ( | String[] | selfSource | ) |
Sets the self source. index 0 is GIT url index 1 is filename
- Parameters
-
selfSource the new self source
Definition at line 828 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.selfSource.
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseLoader.fromGit(), com.neuronrobotics.bowlerstudio.scripting.RobotHelper.getDefaultContents(), and com.neuronrobotics.bowlerstudio.scripting.RobotHelper.inlineScriptRun().
◆ setGitWalkingEngine()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.setGitWalkingEngine | ( | String[] | walkingEngine | ) |
Sets the walking engine.
- Parameters
-
walkingEngine the new walking engine
Definition at line 807 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.walkingEngine.
Referenced by com.neuronrobotics.bowlerstudio.scripting.RobotHelper.getDefaultContents(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseLoader.setGitWalkingEngine().
◆ setHomeProvider()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.setHomeProvider | ( | ICalcLimbHomeProvider | homeProvider | ) |
Definition at line 963 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.homeProvider.
◆ setIMUFromCentroid()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.setIMUFromCentroid | ( | TransformNR | centerOfMassFromCentroid | ) |
Definition at line 853 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.centerOfMassFromCentroid.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().
◆ setMassKg()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.setMassKg | ( | double | mass | ) |
Definition at line 836 of file MobileBase.java.
References com.neuronrobotics.sdk.common.BowlerAbstractDevice.getScriptingName(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.mass.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().

◆ setVitamin()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.setVitamin | ( | String | name, |
| String | type, | ||
| String | id | ||
| ) |
Add a vitamin to this link
- Parameters
-
name the name of this vitamin, if the name already exists, the data will be overwritten. type the vitamin type, this maps the the json filename id the part ID, theis maps to the key in the json for the vitamin
Definition at line 564 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.getVitamins().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getVitamins().

◆ setVitaminVariant()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.setVitaminVariant | ( | String | name, |
| String | tagValue2 | ||
| ) |
Set a purchasing code for a vitamin
- Parameters
-
name name of vitamin tagValue2 Purchaning code
Definition at line 578 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.vitaminVariant.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getVitamins().
◆ setWalkingDriveEngine()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.setWalkingDriveEngine | ( | IDriveEngine | walkingDriveEngine | ) |
Sets the walking drive engine.
- Parameters
-
walkingDriveEngine the new walking drive engine
Definition at line 747 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.walkingDriveEngine.
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseLoader.setGitWalkingEngine().
◆ shutDownParallel()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.shutDownParallel | ( | ParallelGroup | group | ) |
Definition at line 870 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.close(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getNameOfParallelGroup(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.parallelGroups.

◆ sync()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.sync | ( | ) |
Implements com.neuronrobotics.sdk.addons.kinematics.IHardwareSyncPulseReciver.
Definition at line 1014 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.IHardwareSyncPulseProvider.doSync().

◆ updatePositions()
| void com.neuronrobotics.sdk.addons.kinematics.MobileBase.updatePositions | ( | ) |
Update positions.
Definition at line 788 of file MobileBase.java.
References com.neuronrobotics.sdk.addons.kinematics.MobileBase.fireIOnMobileBaseRenderChange(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.runRenderWrangler().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.DriveArc(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.DriveVelocityArc(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.DriveVelocityStraight(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.setMobileBase().

Member Data Documentation
◆ appendages
|
private |
The appendages.
Definition at line 35 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAllDHChains(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAppendages(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().
◆ centerOfMassFromCentroid
|
private |
Definition at line 60 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getCenterOfMassFromCentroid(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.setCenterOfMassFromCentroid(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.setIMUFromCentroid().
◆ changeListeners
|
private |
The drivable.
Definition at line 44 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.addIOnMobileBaseRenderChange(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.clearIOnMobileBaseRenderChange(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.fireIOnMobileBaseRenderChange(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.removeIOnMobileBaseRenderChange().
◆ drivable
|
private |
The drivable.
Definition at line 41 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAllDHChains(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getDrivable(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().
◆ homeProvider
|
private |
Definition at line 65 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.calcHome(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.setHomeProvider().
◆ IMUFromCentroid
|
private |
Definition at line 62 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getIMUFromCentroid().
◆ legs
|
private |
The legs.
Definition at line 32 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAllDHChains(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getLegs(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getTipLocations(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.pose().
◆ mass
|
private |
Definition at line 59 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getMassKg(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.setMassKg().
◆ parallelGroups
|
private |
Definition at line 64 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getParallelGroups(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.shutDownParallel().
◆ selfSource
|
private |
The self source.
Definition at line 57 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getGitSelfSource(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.setGitSelfSource().
◆ steerable
|
private |
The steerable.
Definition at line 38 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAllDHChains(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getSteerable(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().
◆ vitamins
|
private |
Definition at line 53 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getVitamins().
◆ vitaminVariant
|
private |
Definition at line 54 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getVitaminVariant(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.setVitaminVariant().
◆ walkingDriveEngine
|
private |
The walking drive engine.
Definition at line 47 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getWalkingDriveEngine(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.setWalkingDriveEngine().
◆ walkingEngine
|
private |
The walking engine.
Definition at line 50 of file MobileBase.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getGitWalkingEngine(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.setGitWalkingEngine().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/MobileBase.java