
 Public Member Functions inherited from
Public Member Functions inherited from Private Member Functions | |
| double[] | crossProduct (double[] a, double[] b) |
Private Attributes | |
| DHChain | chain = null |
| ArrayList< Object > | linksListeners = new ArrayList<Object>() |
| Object | currentTarget = new Object() |
| ArrayList< LinkConfiguration > | configs |
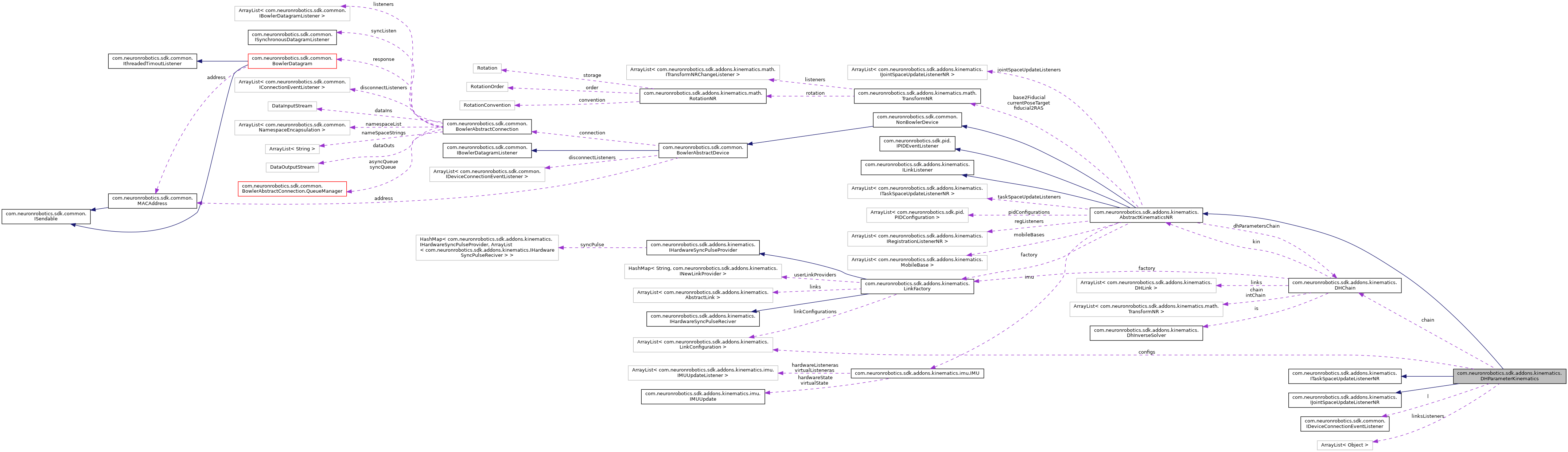
Detailed Description
The Class DHParameterKinematics.
Definition at line 23 of file DHParameterKinematics.java.
Constructor & Destructor Documentation
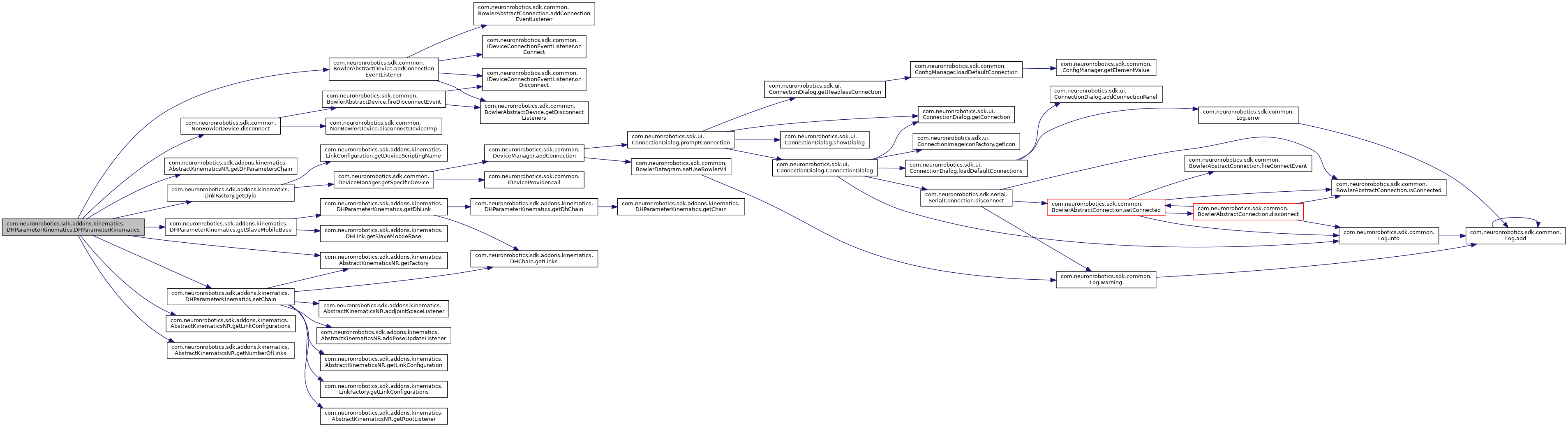
◆ DHParameterKinematics() [1/10]
| com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics | ( | BowlerAbstractDevice | bad, |
| Element | linkStream | ||
| ) |
Instantiates a new DH parameter kinematics.
- Parameters
-
bad the bad linkStream the link stream
Definition at line 64 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.common.BowlerAbstractDevice.addConnectionEventListener(), com.neuronrobotics.sdk.common.NonBowlerDevice.disconnect(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getDhParametersChain(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getDyio(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFactory(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getLinkConfigurations(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getNumberOfLinks(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getSlaveMobileBase(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain().
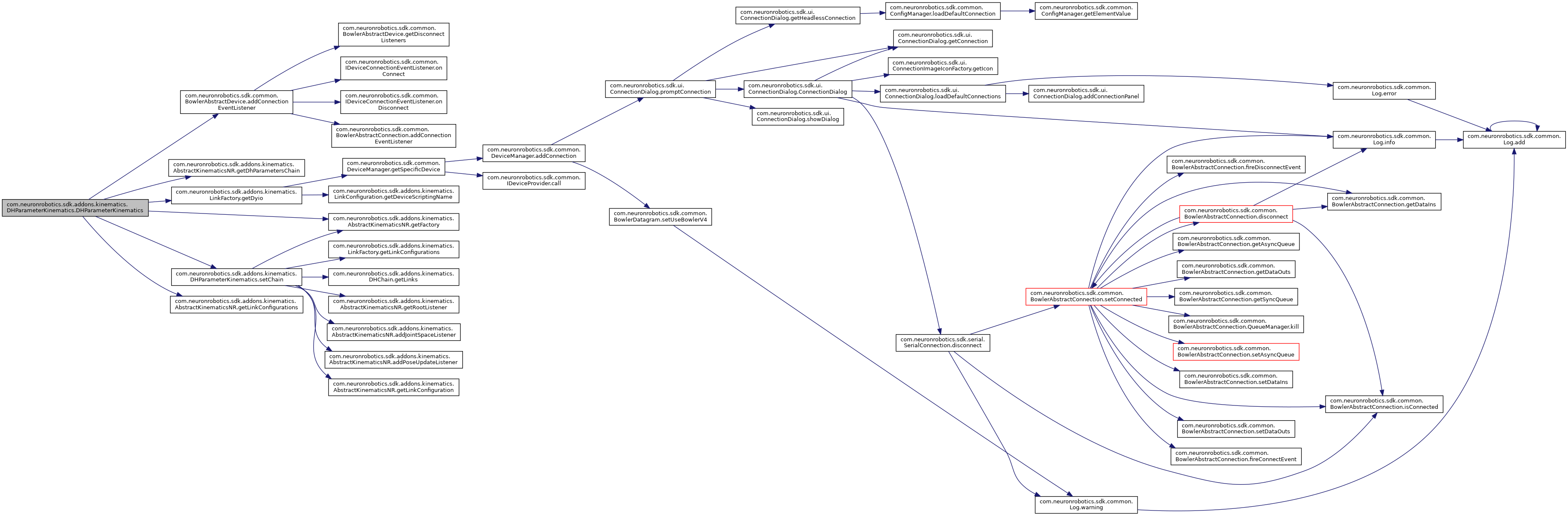
◆ DHParameterKinematics() [2/10]
| com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics | ( | BowlerAbstractDevice | bad, |
| InputStream | linkStream | ||
| ) |
Instantiates a new DH parameter kinematics.
- Parameters
-
bad the bad linkStream the link stream
Definition at line 99 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.common.BowlerAbstractDevice.addConnectionEventListener(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getDhParametersChain(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getDyio(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFactory(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getLinkConfigurations(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain().
◆ DHParameterKinematics() [3/10]
| com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics | ( | BowlerAbstractDevice | bad, |
| InputStream | linkStream, | ||
| InputStream | depricated | ||
| ) |
Instantiates a new DH parameter kinematics.
- Parameters
-
bad the bad linkStream the link stream depricated the depricated
Definition at line 120 of file DHParameterKinematics.java.
◆ DHParameterKinematics() [4/10]
| com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics | ( | BowlerAbstractDevice | bad | ) |
Instantiates a new DH parameter kinematics.
- Parameters
-
bad the bad
Definition at line 130 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.xml.XmlFactory.getDefaultConfigurationStream().

◆ DHParameterKinematics() [5/10]
| com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics | ( | BowlerAbstractDevice | bad, |
| String | file | ||
| ) |
Instantiates a new DH parameter kinematics.
- Parameters
-
bad the bad file the file
Definition at line 142 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.xml.XmlFactory.getDefaultConfigurationStream().

◆ DHParameterKinematics() [6/10]
| com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics | ( | BowlerAbstractDevice | bad, |
| File | configFile | ||
| ) | throws FileNotFoundException |
Instantiates a new DH parameter kinematics.
- Parameters
-
bad the bad configFile the config file
- Exceptions
-
FileNotFoundException the file not found exception
Definition at line 156 of file DHParameterKinematics.java.
◆ DHParameterKinematics() [7/10]
| com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics | ( | ) |
Instantiates a new DH parameter kinematics.
Definition at line 163 of file DHParameterKinematics.java.
◆ DHParameterKinematics() [8/10]
| com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics | ( | String | file | ) |
Instantiates a new DH parameter kinematics.
- Parameters
-
file the file
Definition at line 173 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.xml.XmlFactory.getDefaultConfigurationStream().

◆ DHParameterKinematics() [9/10]
| com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics | ( | Element | linkStream | ) |
Instantiates a new DH parameter kinematics.
- Parameters
-
linkStream the link stream
Definition at line 183 of file DHParameterKinematics.java.
◆ DHParameterKinematics() [10/10]
| com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics | ( | File | configFile | ) | throws FileNotFoundException |
Instantiates a new DH parameter kinematics.
- Parameters
-
configFile the config file
- Exceptions
-
FileNotFoundException the file not found exception
Definition at line 195 of file DHParameterKinematics.java.
Member Function Documentation
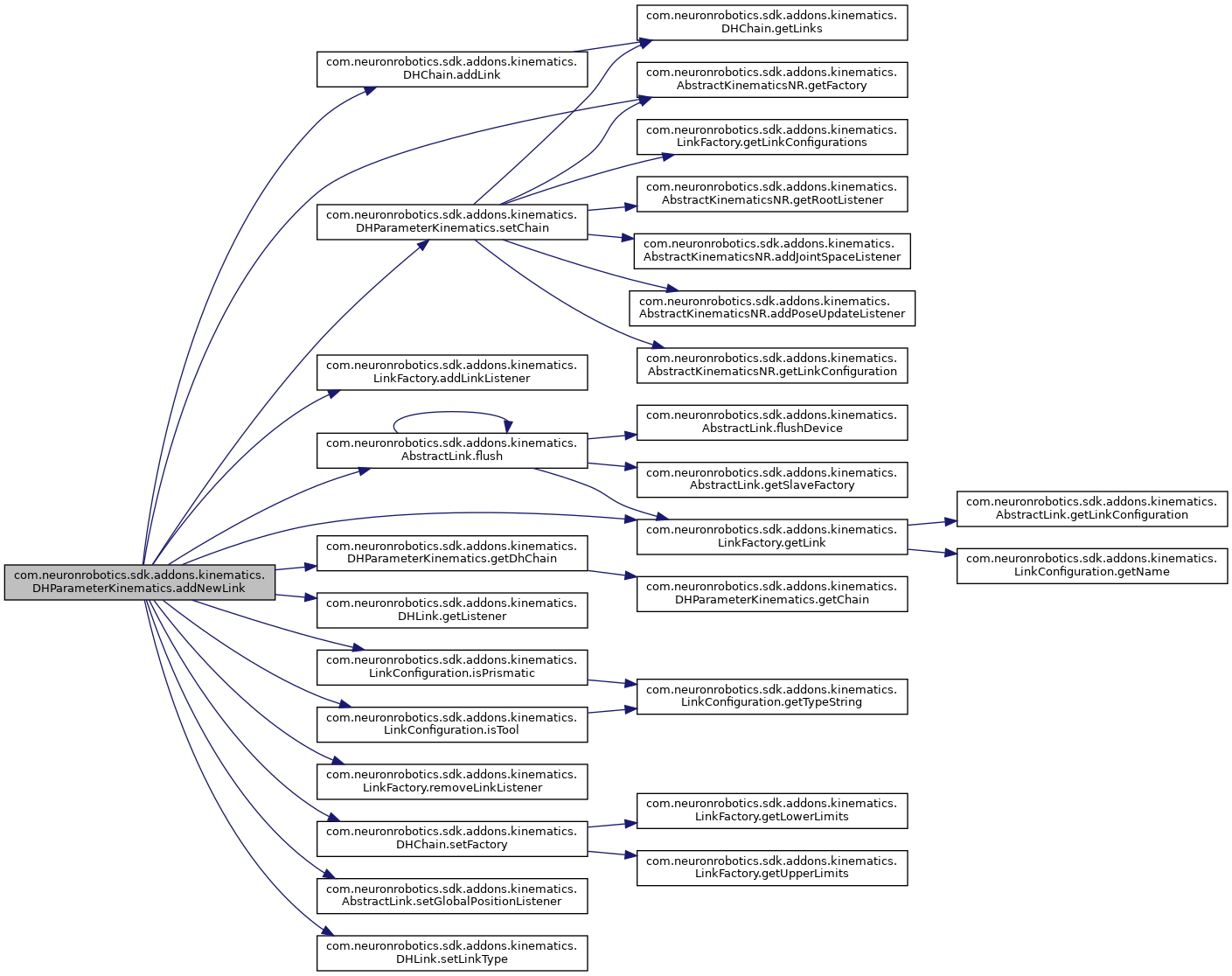
◆ addNewLink()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink | ( | LinkConfiguration | newLink, |
| DHLink | dhLink | ||
| ) |
Adds the new link.
- Parameters
-
newLink the new link dhLink the dh link
Definition at line 580 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.addLink(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.addLinkListener(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.chain, com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.factory, com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flush(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhChain(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFactory(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getListener(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isPrismatic(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isTool(), com.neuronrobotics.sdk.addons.kinematics.DhLinkType.PRISMATIC, com.neuronrobotics.sdk.addons.kinematics.LinkFactory.removeLinkListener(), com.neuronrobotics.sdk.addons.kinematics.DhLinkType.ROTORY, com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain(), com.neuronrobotics.sdk.addons.kinematics.DHChain.setFactory(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setGlobalPositionListener(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setLinkType(), and com.neuronrobotics.sdk.addons.kinematics.DhLinkType.TOOL.
Referenced by com.neuronrobotics.bowlerstudio.scripting.RobotHelper.getDefaultContents().
◆ connectDevice()
| boolean com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.connectDevice | ( | ) |
Connect device.
- Returns
- true, if successful
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.
Definition at line 512 of file DHParameterKinematics.java.
◆ crossProduct()
|
private |
Cross product.
- Parameters
-
a the a b the b
- Returns
- the double[]
Definition at line 230 of file DHParameterKinematics.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian().
◆ disconnectDevice()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.disconnectDevice | ( | ) |
This method tells the connection object to disconnect its pipes and close out the connection. Once this is called, it is safe to remove your device.
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.
Definition at line 499 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.removeJointSpaceUpdateListener(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.removePoseUpdateListener().

◆ forwardKinematics()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.forwardKinematics | ( | double[] | jointSpaceVector | ) |
Forward kinematics.
- Parameters
-
jointSpaceVector the joint space vector
- Returns
- 6x1 vector in task space, unit in mm,radians [x,y,z,rotx,rotY,rotZ]
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.
Definition at line 217 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematics(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhChain().
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().

◆ getChain()
| DHChain com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain | ( | ) |
Gets the chain.
- Returns
- the chain
Definition at line 401 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.chain.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.compute(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChainTransformations(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDH_Alpha(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDH_D(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDH_R(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDH_Theta(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhChain(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getLinkObjectManipulator(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getLinkTip(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.linkCoM(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.onJointSpaceUpdate(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDH_Alpha(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDH_D(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDH_R(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDH_Theta(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setGlobalToFiducialTransform(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.updateCadLocations(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateLimb().
◆ getChainTransformations()
| ArrayList<TransformNR> com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChainTransformations | ( | ) |
Gets the chain transformations.
- Returns
- the chain transformations
Definition at line 373 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getChain(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentJointSpaceVector().

◆ getCurrentTargetObject()
| Object com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getCurrentTargetObject | ( | ) |
Gets the current target Object.
- Returns
- the current target Object
Definition at line 568 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.currentTarget.
◆ getDH_Alpha()
| double com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDH_Alpha | ( | int | index | ) |
Gets the alpha.
- Returns
- the alpha
Definition at line 753 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().

◆ getDH_D()
| double com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDH_D | ( | int | index | ) |
Gets the d.
- Returns
- the d
Definition at line 733 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().

◆ getDH_R()
| double com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDH_R | ( | int | index | ) |
Gets the r.
- Returns
- the r
Definition at line 744 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().

◆ getDH_Theta()
| double com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDH_Theta | ( | int | index | ) |
Gets the theta.
- Returns
- the theta
Definition at line 725 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().

◆ getDhChain()
| DHChain com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhChain | ( | ) |
Gets the dh chain.
- Returns
- the dh chain
Definition at line 392 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.forwardKinematics(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhLink(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getListener(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.inverseKinematics(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.removeLink().

◆ getDhLink()
| DHLink com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhLink | ( | int | i | ) |
Definition at line 795 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhChain(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.addListeners(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.generateCad(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getSlaveMobileBase().

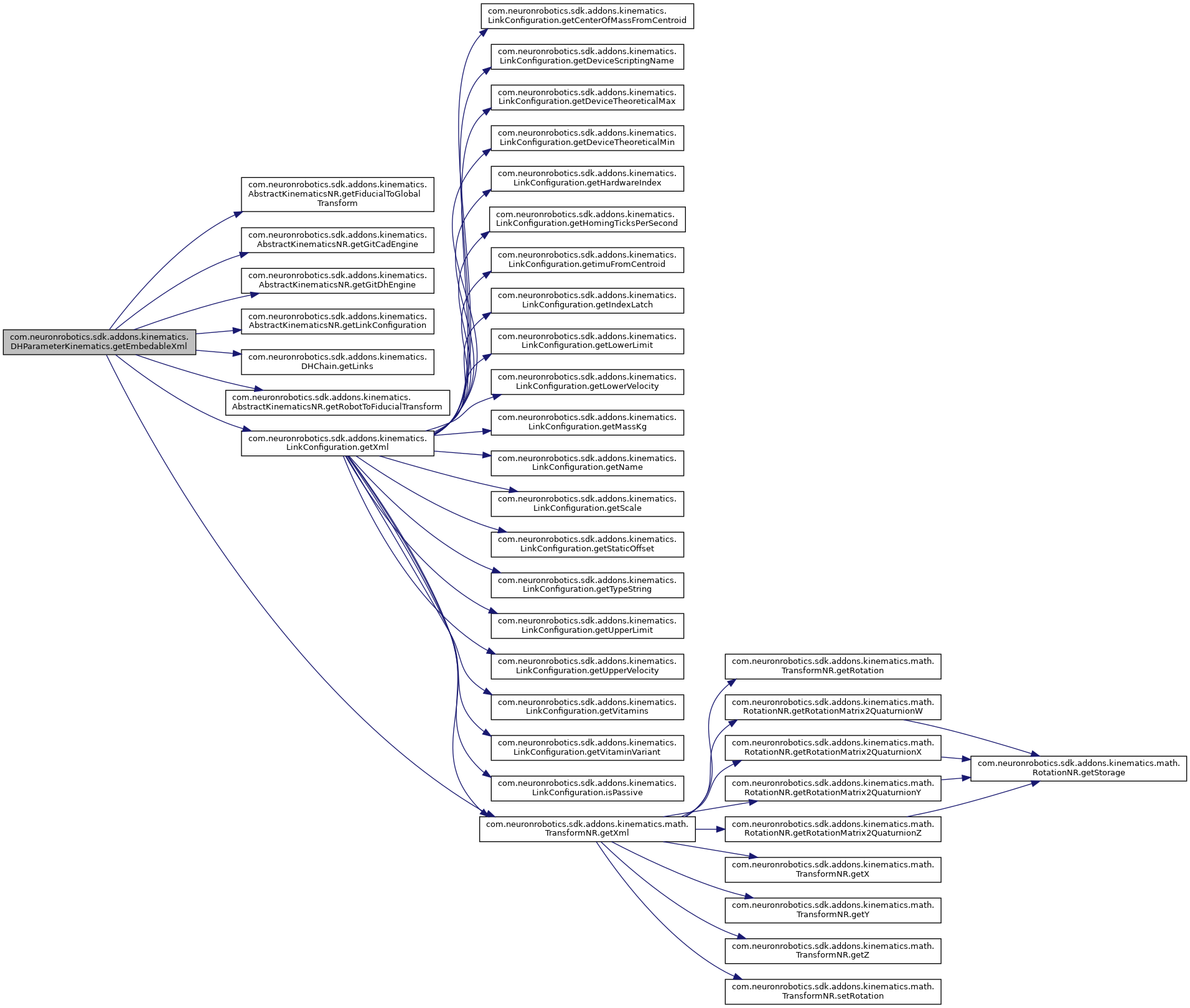
◆ getEmbedableXml()
| String com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getEmbedableXml | ( | ) |
Gets the embedable xml.
- Returns
- the embedable xml
Definition at line 461 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.chain, com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFiducialToGlobalTransform(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getGitCadEngine(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getGitDhEngine(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getLinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getRobotToFiducialTransform(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), and com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getXml().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getXml(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.makeLimbTag().
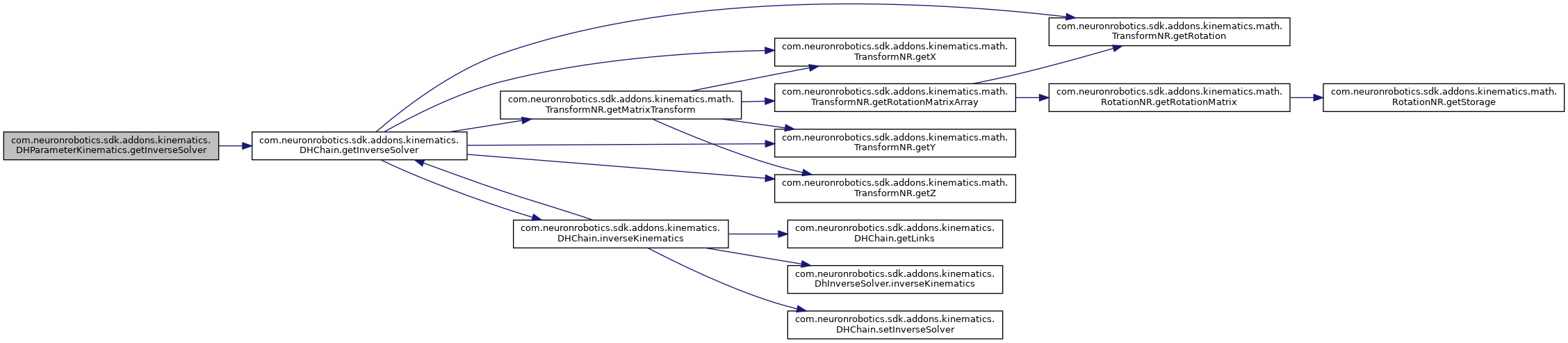
◆ getInverseSolver()
| DhInverseSolver com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getInverseSolver | ( | ) |
Gets the inverse solver.
- Returns
- the inverse solver
Definition at line 549 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.chain, and com.neuronrobotics.sdk.addons.kinematics.DHChain.getInverseSolver().
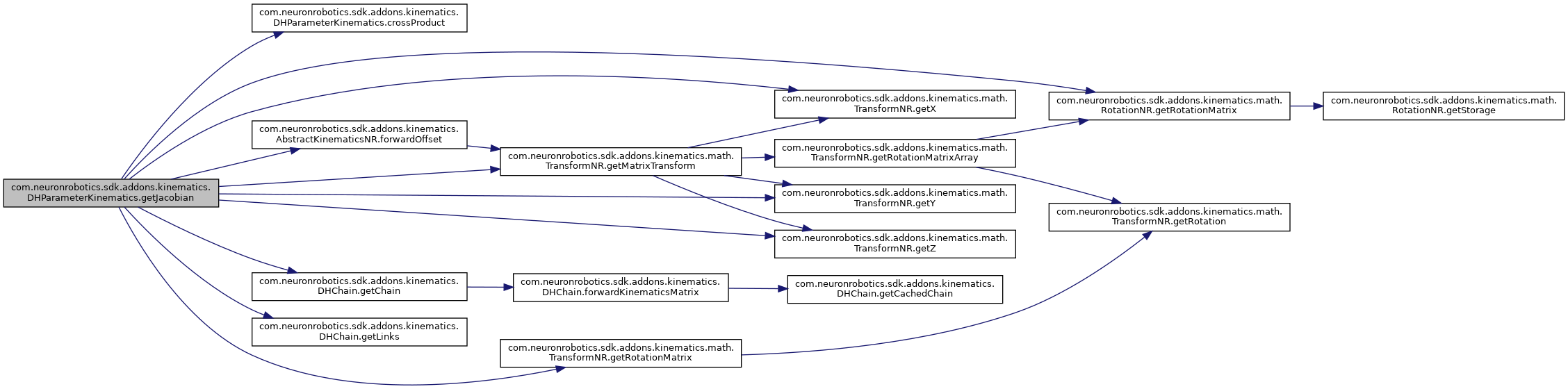
◆ getJacobian() [1/4]
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian | ( | ) |
Gets the Jacobian matrix.
- Returns
- a matrix representing the Jacobian for the current configuration
Definition at line 348 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhChain().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian().

◆ getJacobian() [2/4]
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian | ( | DHChain | chain, |
| double[] | jointSpaceVector, | ||
| int | index | ||
| ) |
Gets the Jacobian matrix.
- Parameters
-
jointSpaceVector the joint space vector
- Returns
- a matrix representing the Jacobian for the current configuration
Definition at line 245 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.chain, com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.crossProduct(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.forwardOffset(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getChain(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getMatrixTransform(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNR.getRotationMatrix(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getRotationMatrix(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getX(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getY(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getZ(), and com.neuronrobotics.sdk.addons.kinematics.DhLinkType.ROTORY.
◆ getJacobian() [3/4]
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian | ( | double[] | jointSpaceVector, |
| int | index | ||
| ) |
Gets the Jacobian matrix.
- Returns
- a matrix representing the Jacobian for the current configuration
Definition at line 364 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhChain(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian().

◆ getJacobian() [4/4]
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian | ( | int | index | ) |
Gets the Jacobian matrix.
- Returns
- a matrix representing the Jacobian for the current configuration
Definition at line 356 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentJointSpaceVector(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian().

◆ getLinkObjectManipulator()
| Object com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getLinkObjectManipulator | ( | int | index | ) |
Definition at line 716 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().

◆ getLinkTip()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getLinkTip | ( | int | linkIndex | ) |
Definition at line 830 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.getCachedChain(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain().

◆ getListener()
| Object com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getListener | ( | int | i | ) |
Definition at line 798 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhChain(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().

◆ getSlaveMobileBase()
| MobileBase com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getSlaveMobileBase | ( | int | index | ) |
Definition at line 814 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhLink(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.getSlaveMobileBase().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateLimb().

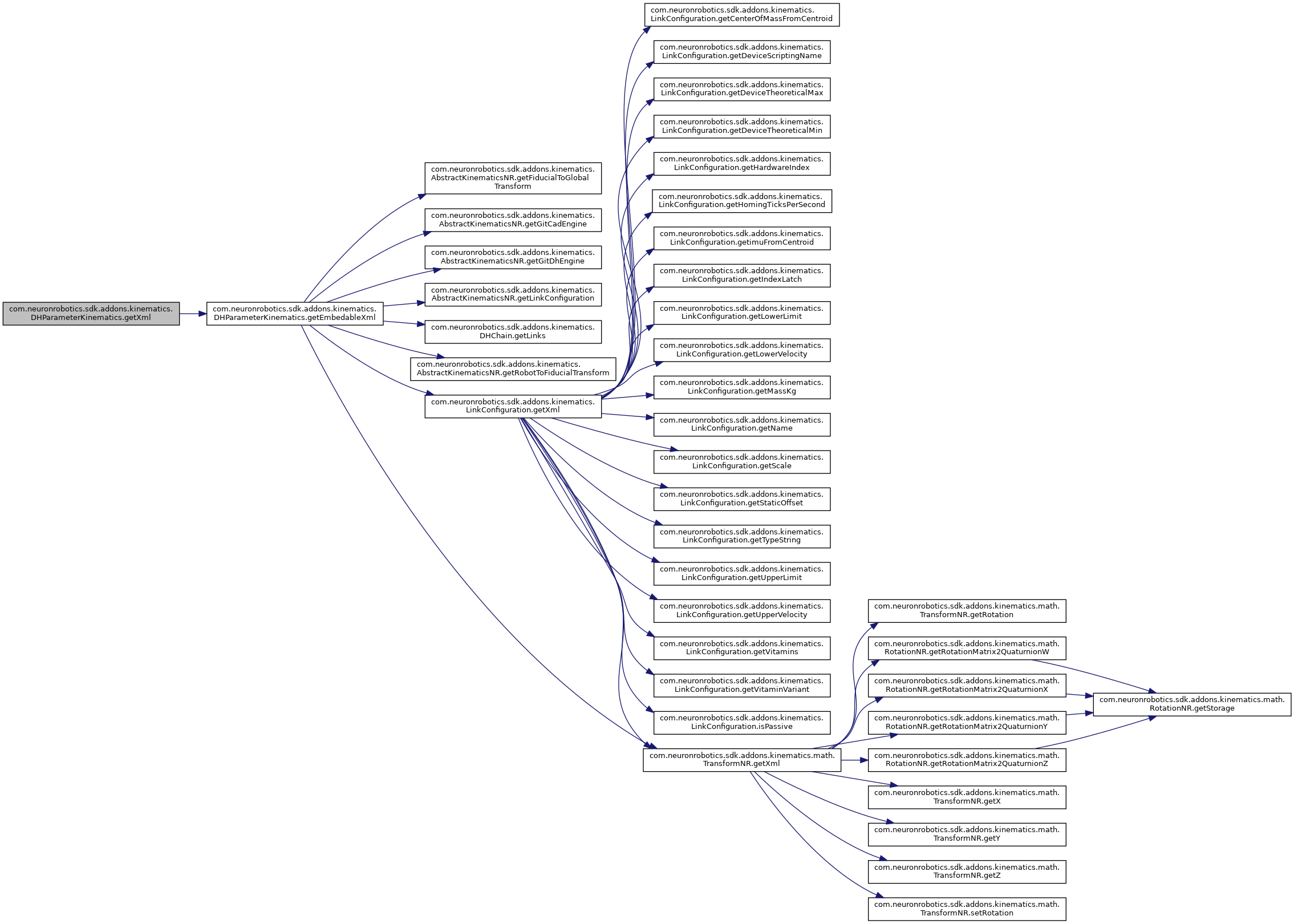
◆ getXml()
| String com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getXml | ( | ) |
Gets the xml.
- Returns
- the xml
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Definition at line 445 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getEmbedableXml().
◆ inverseKinematics()
| double [] com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.inverseKinematics | ( | TransformNR | taskSpaceTransform | ) | throws Exception |
Inverse kinematics.
- Parameters
-
taskSpaceTransform the task space transform
- Returns
- Nx1 vector in task space, in mm where N is number of links
- Exceptions
-
Exception the exception
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.
Definition at line 206 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentJointSpaceVector(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhChain(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.inverseKinematics().

◆ linkCoM() [1/2]
| TransformNR com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.linkCoM | ( | double | linkAngleToClaculate, |
| int | linkIndex | ||
| ) |
Definition at line 705 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getChain(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentJointSpaceVector(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getLinkConfiguration().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.linkCoM().

◆ linkCoM() [2/2]
| TransformNR com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.linkCoM | ( | int | linkIndex | ) |
Definition at line 713 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentJointSpaceVector(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.linkCoM().

◆ onJointSpaceLimit()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.onJointSpaceLimit | ( | AbstractKinematicsNR | source, |
| int | axis, | ||
| JointLimit | event | ||
| ) |
The JointSpace limit This is called when the kinematics model has a new set of pose data.
- Parameters
-
source The AbstractKinematics object that the update was called from axis the axis event the event
Implements com.neuronrobotics.sdk.addons.kinematics.IJointSpaceUpdateListenerNR.
Definition at line 698 of file DHParameterKinematics.java.
◆ onJointSpaceTargetUpdate()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.onJointSpaceTargetUpdate | ( | AbstractKinematicsNR | source, |
| double[] | joints | ||
| ) |
The JointSpace update event This is called when the kinematics model has a new set of pose data.
- Parameters
-
source The AbstractKinematics object that the update was called from joints the current joint space values mm,radians
Implements com.neuronrobotics.sdk.addons.kinematics.IJointSpaceUpdateListenerNR.
Definition at line 684 of file DHParameterKinematics.java.
◆ onJointSpaceUpdate()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.onJointSpaceUpdate | ( | final AbstractKinematicsNR | source, |
| final double[] | joints | ||
| ) |
The JointSpace update event This is called when the kinematics model has a new set of pose data.
- Parameters
-
source The AbstractKinematics object that the update was called from joints the current joint space values mm,radians
Implements com.neuronrobotics.sdk.addons.kinematics.IJointSpaceUpdateListenerNR.
Definition at line 646 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.fireOnLinkGlobalPositionChange(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.updateCadLocations().

◆ onTargetTaskSpaceUpdate()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.onTargetTaskSpaceUpdate | ( | AbstractKinematicsNR | source, |
| TransformNR | pose | ||
| ) |
The position update event This is called when the kinematics model has a new set of target data.
- Parameters
-
source The AbstractKinematics object that the update was called from pose target pose transform
Implements com.neuronrobotics.sdk.addons.kinematics.ITaskSpaceUpdateListenerNR.
Definition at line 539 of file DHParameterKinematics.java.
◆ onTaskSpaceUpdate()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.onTaskSpaceUpdate | ( | AbstractKinematicsNR | source, |
| TransformNR | pose | ||
| ) |
The position update event This is called when the kinematics model has a new set of pose data.
- Parameters
-
source The AbstractKinematics object that the update was called from pose the current pose transform
Implements com.neuronrobotics.sdk.addons.kinematics.ITaskSpaceUpdateListenerNR.
Definition at line 526 of file DHParameterKinematics.java.
◆ refreshPose()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.refreshPose | ( | ) |
Definition at line 811 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.runRenderWrangler().

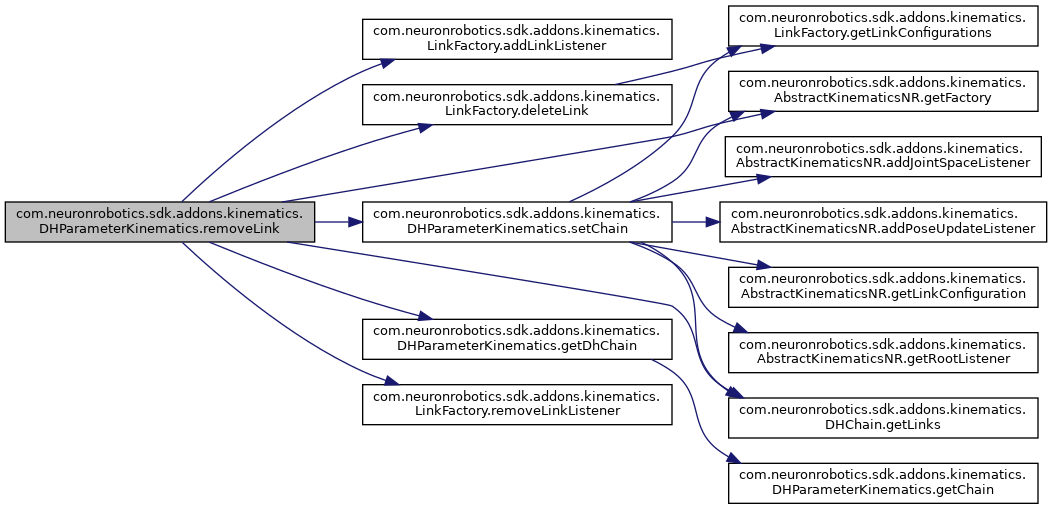
◆ removeLink()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.removeLink | ( | int | index | ) |
Removes the link.
- Parameters
-
index the index
Definition at line 611 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.addLinkListener(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.chain, com.neuronrobotics.sdk.addons.kinematics.LinkFactory.deleteLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.factory, com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhChain(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFactory(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.removeLinkListener(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain().
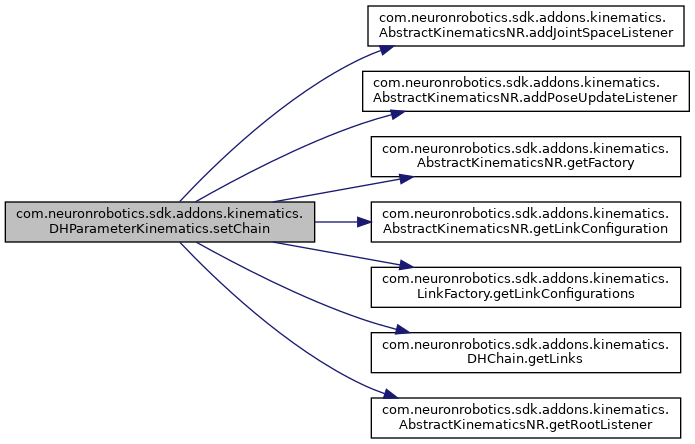
◆ setChain()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain | ( | DHChain | chain | ) |
Sets the chain.
- Parameters
-
chain the new chain
Definition at line 411 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.addJointSpaceListener(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.addPoseUpdateListener(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.chain, com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.configs, com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFactory(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getLinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkConfigurations(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getRootListener(), com.neuronrobotics.sdk.addons.kinematics.DhLinkType.PRISMATIC, com.neuronrobotics.sdk.addons.kinematics.DhLinkType.ROTORY, and com.neuronrobotics.sdk.addons.kinematics.DhLinkType.TOOL.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.removeLink(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDhChain().
◆ setDH_Alpha()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDH_Alpha | ( | int | index, |
| double | value | ||
| ) |
Gets the alpha.
Definition at line 791 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().

◆ setDH_D()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDH_D | ( | int | index, |
| double | value | ||
| ) |
Gets the d.
Definition at line 771 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().

◆ setDH_R()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDH_R | ( | int | index, |
| double | value | ||
| ) |
Gets the r.
Definition at line 782 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().

◆ setDH_Theta()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDH_Theta | ( | int | index, |
| double | value | ||
| ) |
Gets the theta.
Definition at line 763 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().

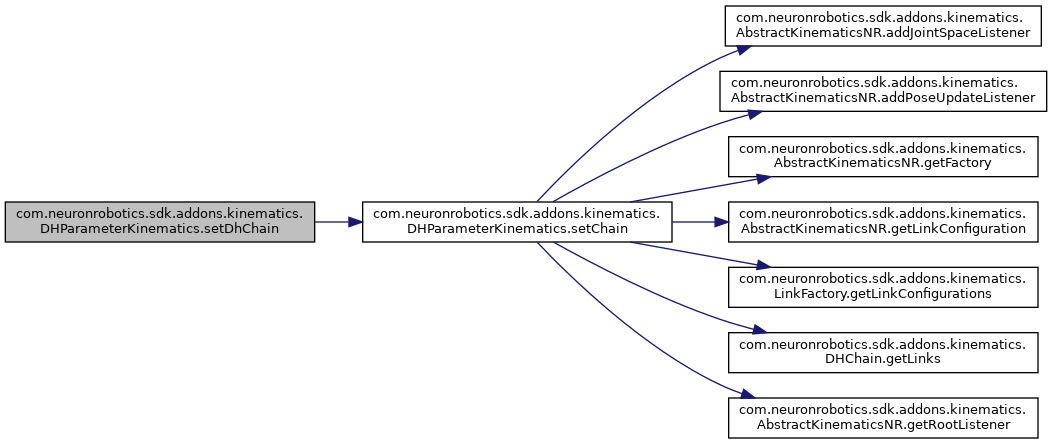
◆ setDhChain()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDhChain | ( | DHChain | chain | ) |
Sets the dh chain.
- Parameters
-
chain the new dh chain
Definition at line 383 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain().
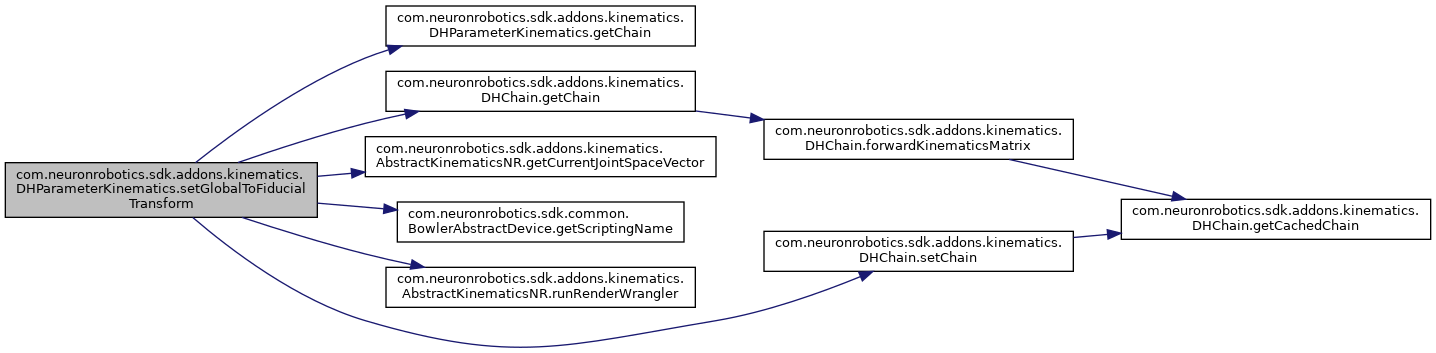
◆ setGlobalToFiducialTransform()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setGlobalToFiducialTransform | ( | TransformNR | frameToBase | ) |
Sets the global to fiducial transform.
- Parameters
-
frameToBase the new global to fiducial transform
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Definition at line 663 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getChain(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentJointSpaceVector(), com.neuronrobotics.sdk.common.BowlerAbstractDevice.getScriptingName(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.runRenderWrangler(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.setChain().
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateLimb().
◆ setInverseSolver()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setInverseSolver | ( | DhInverseSolver | inverseSolver | ) |
Sets the inverse solver.
- Parameters
-
inverseSolver the new inverse solver
Definition at line 559 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.chain, and com.neuronrobotics.sdk.addons.kinematics.DHChain.setInverseSolver().
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseLoader.setDefaultDhParameterKinematics().

◆ setRobotToFiducialTransform()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setRobotToFiducialTransform | ( | TransformNR | newTrans | ) |
Sets the robot to fiducial transform.
- Parameters
-
newTrans the new robot to fiducial transform
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Definition at line 807 of file DHParameterKinematics.java.
◆ throwExceptionOnJointLimit()
| void com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.throwExceptionOnJointLimit | ( | boolean | b | ) |
THis disables the exception being thrown on joint limits normal mode is to throw an exception when a joint is commanded to a value beyond its limits
when exceptions are disabled, the joint just goes to the limit instead.
- Parameters
-
b
Definition at line 824 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getAbstractLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getNumberOfLinks(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setUseLimits().
◆ updateCadLocations()
| ArrayList<TransformNR> com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.updateCadLocations | ( | ) |
Update cad locations.
Definition at line 627 of file DHParameterKinematics.java.
References com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getChain(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentJointSpaceVector().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.onJointSpaceUpdate().

Member Data Documentation
◆ chain
|
private |
The chain.
Definition at line 27 of file DHParameterKinematics.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getEmbedableXml(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getInverseSolver(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.removeLink(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setInverseSolver().
◆ configs
|
private |
Definition at line 54 of file DHParameterKinematics.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain().
◆ currentTarget
|
private |
The current target.
Definition at line 33 of file DHParameterKinematics.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getCurrentTargetObject().
◆ linksListeners
|
private |
The links listeners.
Definition at line 30 of file DHParameterKinematics.java.
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/DHParameterKinematics.java