Protected Member Functions | |
| void | setPosition (double val) |
| void | setTargetValue (double val) |
Private Attributes | |
| double | targetValue =0 |
| double | targetEngineeringUnits =0 |
| ArrayList< ILinkListener > | links = new ArrayList<ILinkListener>() |
| LinkConfiguration | conf =null |
| ArrayList< LinkConfiguration > | slaveLinks |
| LinkFactory | slaveFactory = new LinkFactory() |
| boolean | useLimits =true |
| Object | linksLocation =null |
| IMU | imu = new IMU() |
Detailed Description
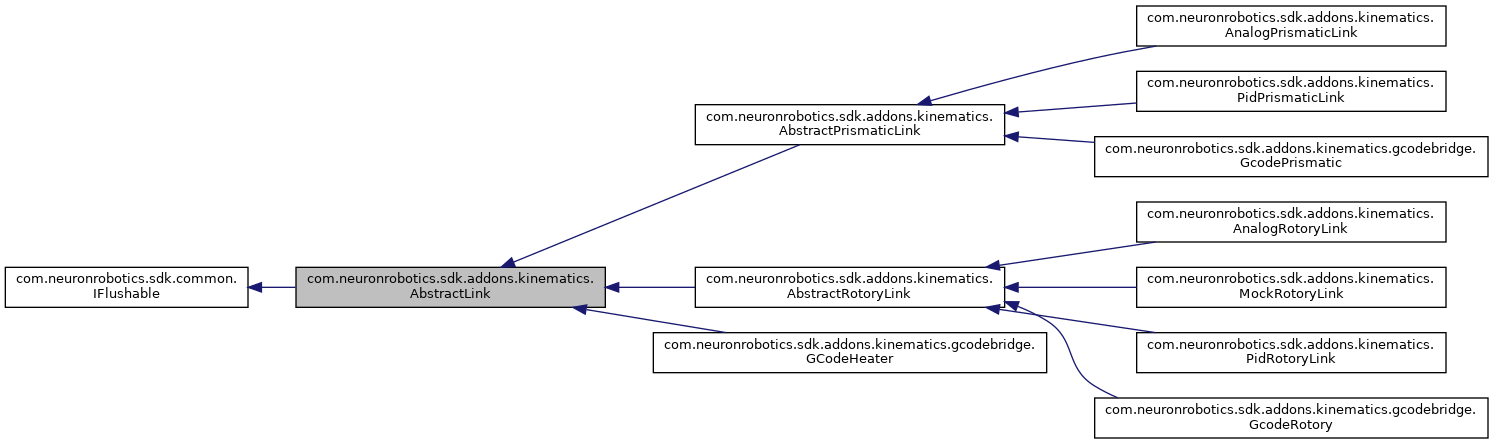
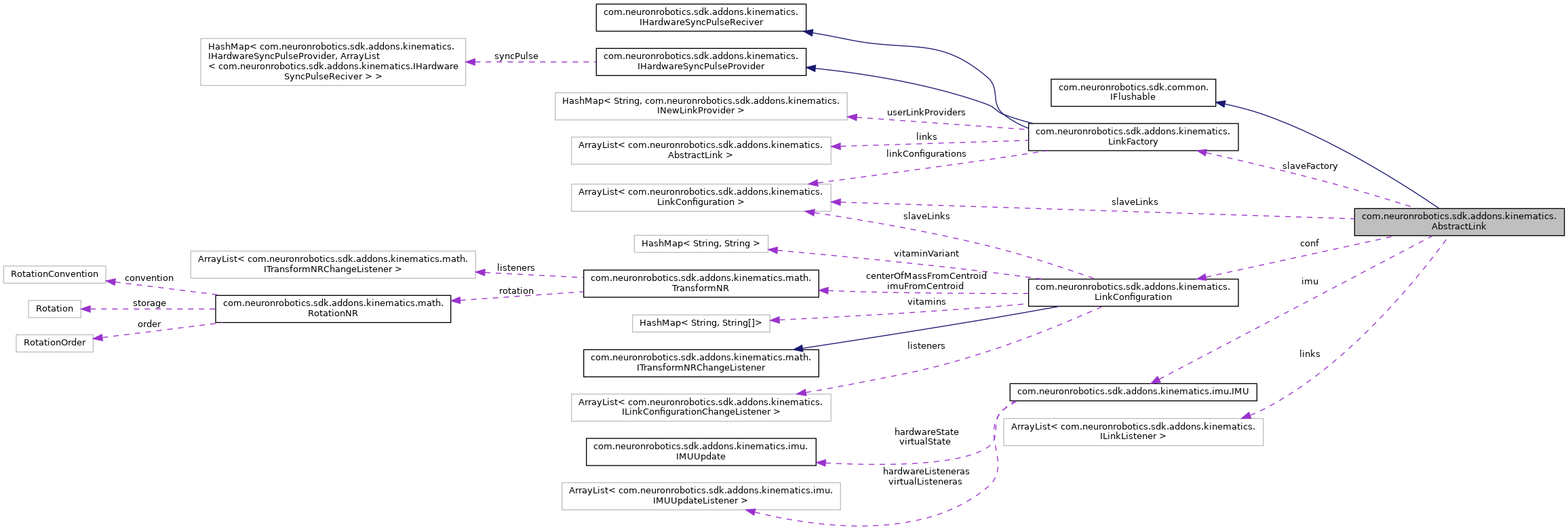
The Class AbstractLink.
Definition at line 22 of file AbstractLink.java.
Constructor & Destructor Documentation
◆ AbstractLink()
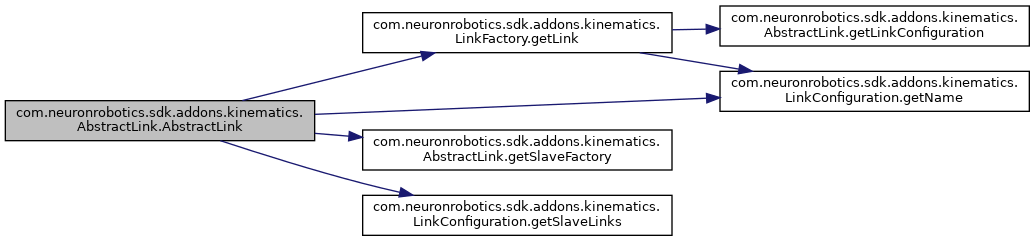
| com.neuronrobotics.sdk.addons.kinematics.AbstractLink.AbstractLink | ( | LinkConfiguration | conf | ) |
Instantiates a new abstract link.
- Parameters
-
conf the conf
Definition at line 101 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getName(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getSlaveFactory(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getSlaveLinks(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.slaveLinks.
Member Function Documentation
◆ addChangeListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.addChangeListener | ( | ILinkConfigurationChangeListener | l | ) |
Definition at line 686 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.addChangeListener(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf.

◆ addLinkListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.addLinkListener | ( | ILinkListener | l | ) |
Adds the link listener.
- Parameters
-
l the l
Definition at line 209 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLinks().
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.generateCad(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), and com.neuronrobotics.sdk.addons.kinematics.LinkFactory.refreshHardwareLayer().

◆ cacheTargetValue()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.cacheTargetValue | ( | ) |
This method is called in order to take the target value and pass it to the implementation's target value This method should not alter the position of the implementations link If the implementation target does not handle chached values, this should be chached in code.
Definition at line 116 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.cacheTargetValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.cacheTargetValueDevice(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getSlaveFactory(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.slaveLinks.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.cacheTargetValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.Home(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setPosition(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue().

◆ cacheTargetValueDevice()
|
abstract |
This method is called in order to take the target value and pass it to the implementation's target value This method should not alter the position of the implementations link If the implementation target does not handle chached values, this should be chached in code.
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink, com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink, com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeRotory, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodePrismatic, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GCodeHeater, com.neuronrobotics.sdk.addons.kinematics.AnalogRotoryLink, and com.neuronrobotics.sdk.addons.kinematics.AnalogPrismaticLink.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.cacheTargetValue().
◆ clearChangeListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.clearChangeListener | ( | ) |
Definition at line 692 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.clearChangeListener(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf.

◆ fireLinkLimitEvent()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.fireLinkLimitEvent | ( | PIDLimitEvent | e | ) |
This fires off a limit event.
- Parameters
-
e the e
Definition at line 251 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLinks().
Referenced by com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.setPIDChannel(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue().

◆ fireLinkListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.fireLinkListener | ( | double | linkUnitsValue | ) |
This method sends the updated angle value to all listeners.
- Parameters
-
linkUnitsValue the link units value
Definition at line 233 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLinks(), com.neuronrobotics.sdk.addons.kinematics.ILinkListener.onLinkPositionUpdate(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toEngineeringUnits().
Referenced by com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.flushAllDevice(), com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.flushAllDevice(), com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.flushDevice(), com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.flushDevice(), com.neuronrobotics.sdk.addons.kinematics.AnalogPrismaticLink.getCurrentPosition(), com.neuronrobotics.sdk.addons.kinematics.AnalogRotoryLink.getCurrentPosition(), com.neuronrobotics.sdk.addons.kinematics.AnalogPrismaticLink.onAnalogValueChange(), com.neuronrobotics.sdk.addons.kinematics.AnalogRotoryLink.onAnalogValueChange(), com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.setPIDChannel(), com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.setPIDChannel(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodePrismatic.setValue(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeRotory.setValue().

◆ flush()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flush | ( | double | time | ) |
This method will force one link to update its position in the given time (seconds).
- Parameters
-
time (seconds) for the position update to take
Implements com.neuronrobotics.sdk.common.IFlushable.
Definition at line 137 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flush(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flushDevice(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getSlaveFactory(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.slaveLinks.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.flush(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flush(), and com.neuronrobotics.sdk.addons.kinematics.LinkFactory.flush().

◆ flushAll()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flushAll | ( | double | time | ) |
This method will force one link to update its position in the given time (seconds) This will also flush the host controller.
- Parameters
-
time (seconds) for the position update to take
Definition at line 152 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flushAll(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flushAllDevice(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getSlaveFactory(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.slaveLinks.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flushAll().

◆ flushAllDevice()
|
abstract |
This method will force one link to update its position in the given time (seconds) This will also flush the host controller.
- Parameters
-
time (seconds) for the position update to take
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink, com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink, com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeRotory, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodePrismatic, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GCodeHeater, com.neuronrobotics.sdk.addons.kinematics.AnalogRotoryLink, and com.neuronrobotics.sdk.addons.kinematics.AnalogPrismaticLink.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flushAll().
◆ flushDevice()
|
abstract |
This method will force one link to update its position in the given time (seconds).
- Parameters
-
time (seconds) for the position update to take
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink, com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink, com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeRotory, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodePrismatic, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GCodeHeater, com.neuronrobotics.sdk.addons.kinematics.AnalogRotoryLink, and com.neuronrobotics.sdk.addons.kinematics.AnalogPrismaticLink.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flush().
◆ getCurrentEngineeringUnits()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getCurrentEngineeringUnits | ( | ) |
Gets the current engineering units.
- Returns
- the current engineering units
Definition at line 309 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getCurrentPosition(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toEngineeringUnits().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.getCurrentAngle(), and com.neuronrobotics.sdk.addons.kinematics.AbstractPrismaticLink.getCurrentDisplacment().

◆ getCurrentPosition()
|
abstract |
This method should return the current position of the link This method is expected to perform a communication with the device .
- Returns
- the current position of the link
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink, com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink, com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeRotory, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodePrismatic, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GCodeHeater, com.neuronrobotics.sdk.addons.kinematics.AnalogRotoryLink, and com.neuronrobotics.sdk.addons.kinematics.AnalogPrismaticLink.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.flush(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getCurrentEngineeringUnits(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentAsLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentAsUpperLimit(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentEngineeringUnits().
◆ getDeviceMaxEngineeringUnits()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMaxEngineeringUnits | ( | ) |
Gets the max engineering units.
- Returns
- the max engineering units
Definition at line 78 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMaximumValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMinimumValue(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getScale(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toEngineeringUnits().

◆ getDeviceMaximumValue()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMaximumValue | ( | ) |
Override this method to specify a larger range
- Returns
- the maximum value possible for a link
Definition at line 50 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMax().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMaxEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMinEngineeringUnits().

◆ getDeviceMinEngineeringUnits()
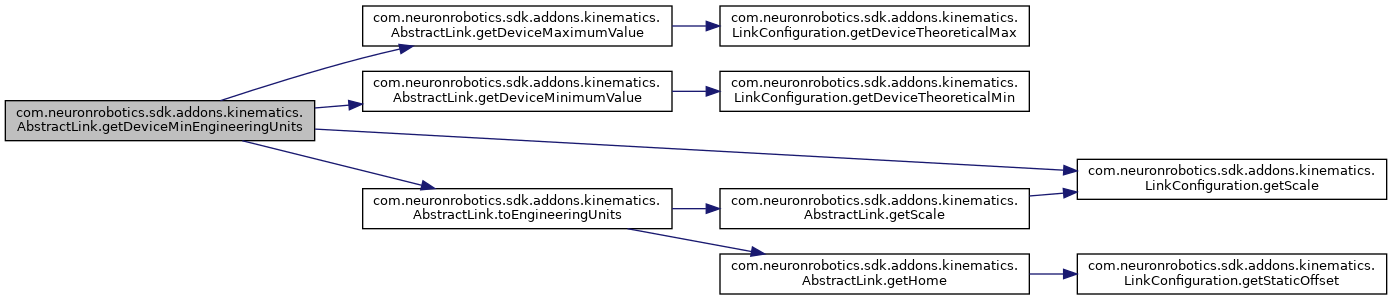
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMinEngineeringUnits | ( | ) |
Gets the min engineering units.
- Returns
- the min engineering units
Definition at line 90 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMaximumValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMinimumValue(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getScale(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toEngineeringUnits().
◆ getDeviceMinimumValue()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMinimumValue | ( | ) |
Override this method to specify a larger range
- Returns
- the minimum value possible for a link
Definition at line 57 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMin().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMaxEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMinEngineeringUnits().

◆ getGlobalPositionListener()
| Object com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getGlobalPositionListener | ( | ) |
Definition at line 673 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.linksLocation.
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateLimb().
◆ getHome()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getHome | ( | ) |
Gets the home.
- Returns
- the home
Definition at line 585 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getStaticOffset().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.Home(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toLinkUnits().

◆ getImu()
| IMU com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getImu | ( | ) |
Definition at line 683 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.imu.
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().
◆ getLinkConfiguration()
| LinkConfiguration com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLinkConfiguration | ( | ) |
Gets the link configuration.
- Returns
- the link configuration
Definition at line 635 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.addLink(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.onLinkLimit().
◆ getLinks()
| ArrayList<ILinkListener> com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLinks | ( | ) |
Gets the links.
- Returns
- the links
Definition at line 644 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.links.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.addLinkListener(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.fireLinkLimitEvent(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.fireLinkListener(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.refreshHardwareLayer(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.removeLinkListener().
◆ getLowerLimit()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLowerLimit | ( | ) |
Gets the lower limit.
- Returns
- the lower limit
Definition at line 576 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLowerLimit().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMinEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.isMinEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.printError(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue().

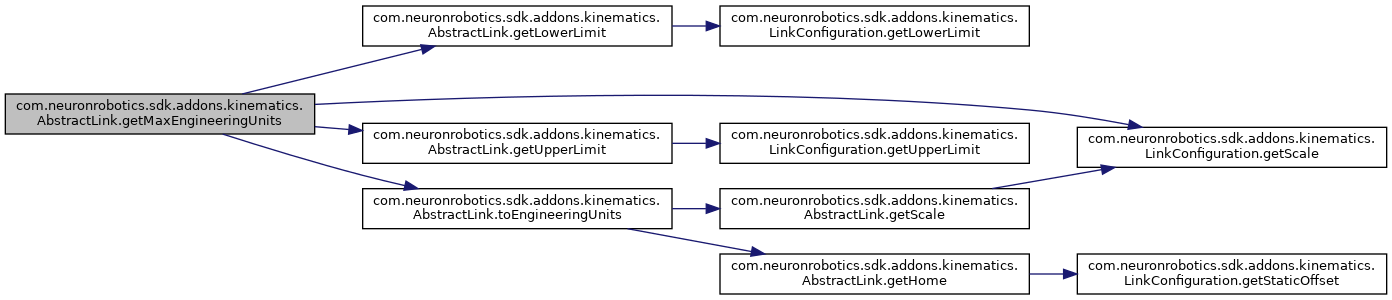
◆ getMaxEngineeringUnits()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxEngineeringUnits | ( | ) |
Gets the max engineering units.
- Returns
- the max engineering units
Definition at line 332 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getScale(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getUpperLimit(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toEngineeringUnits().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.boundToLinkLimits(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkVector(), com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.getMaxAngle(), com.neuronrobotics.sdk.addons.kinematics.AbstractPrismaticLink.getMaxDisplacment(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue().
◆ getMaxVelocityEngineeringUnits()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxVelocityEngineeringUnits | ( | ) |
Gets the max engineering units.
- Returns
- the max engineering units
Definition at line 381 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperVelocity(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toEngineeringUnits().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkVector(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getBestTime().

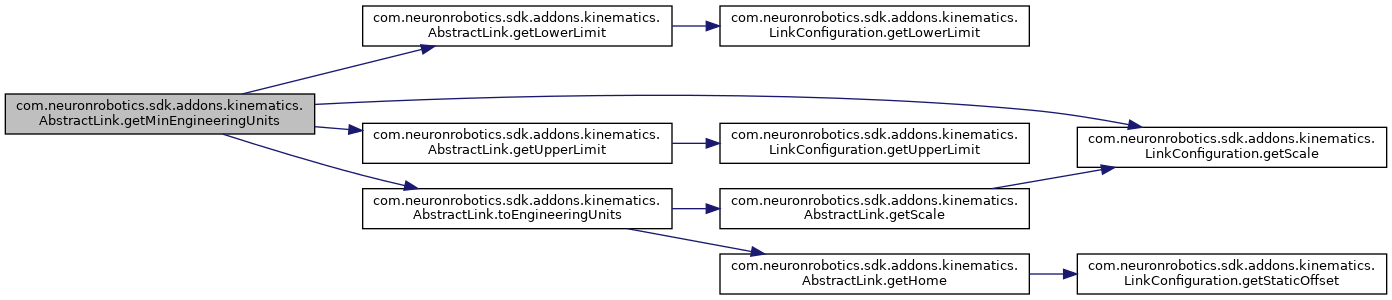
◆ getMinEngineeringUnits()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMinEngineeringUnits | ( | ) |
Gets the min engineering units.
- Returns
- the min engineering units
Definition at line 344 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getScale(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getUpperLimit(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toEngineeringUnits().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.boundToLinkLimits(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkVector(), com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.getMinAngle(), com.neuronrobotics.sdk.addons.kinematics.AbstractPrismaticLink.getMinDisplacment(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue().
◆ getScale()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getScale | ( | ) |
Gets the scale.
- Returns
- the scale
Definition at line 558 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getScale().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toLinkUnits().

◆ getSlaveFactory()
| LinkFactory com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getSlaveFactory | ( | ) |
Definition at line 676 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.slaveFactory.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.AbstractLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.cacheTargetValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flush(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flushAll(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setPosition(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue().
◆ getTargetEngineeringUnits()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getTargetEngineeringUnits | ( | ) |
Gets the target engineering units.
- Returns
- the target engineering units
Definition at line 323 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getTargetValue(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toEngineeringUnits().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.getTargetAngle(), and com.neuronrobotics.sdk.addons.kinematics.AbstractPrismaticLink.getTargetDisplacment().

◆ getTargetValue()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getTargetValue | ( | ) |
Gets the target value.
- Returns
- the target value
Definition at line 513 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.targetValue.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.cacheTargetValueDevice(), com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.cacheTargetValueDevice(), com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.cacheTargetValueDevice(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.flush(), com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.flushAllDevice(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GCodeHeater.flushDevice(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodePrismatic.flushDevice(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeRotory.flushDevice(), com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.flushDevice(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getTargetEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.isMaxEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.isMinEngineeringUnits().
◆ getUpperLimit()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getUpperLimit | ( | ) |
Gets the upper limit.
- Returns
- the upper limit
Definition at line 567 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperLimit().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMinEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.isMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.printError(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue().

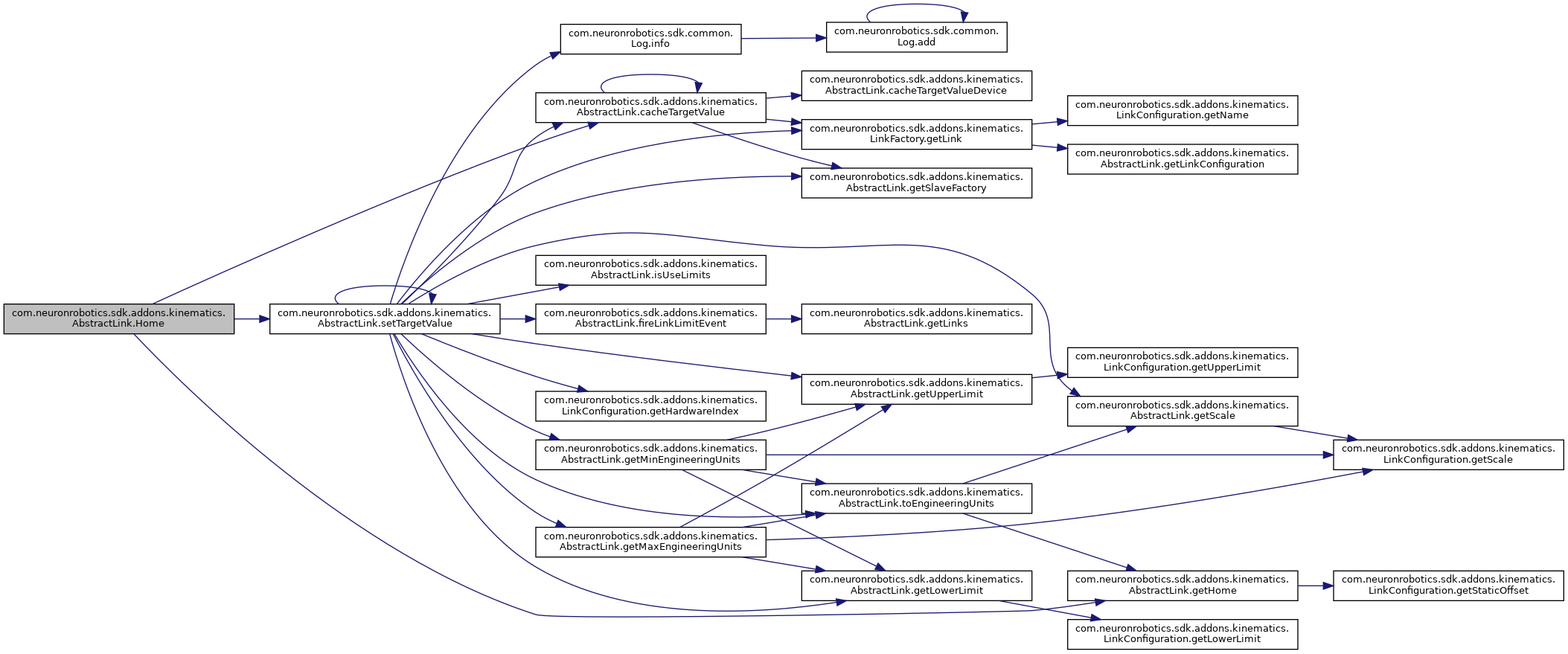
◆ Home()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.Home | ( | ) |
Home.
Definition at line 261 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.cacheTargetValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getHome(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue().
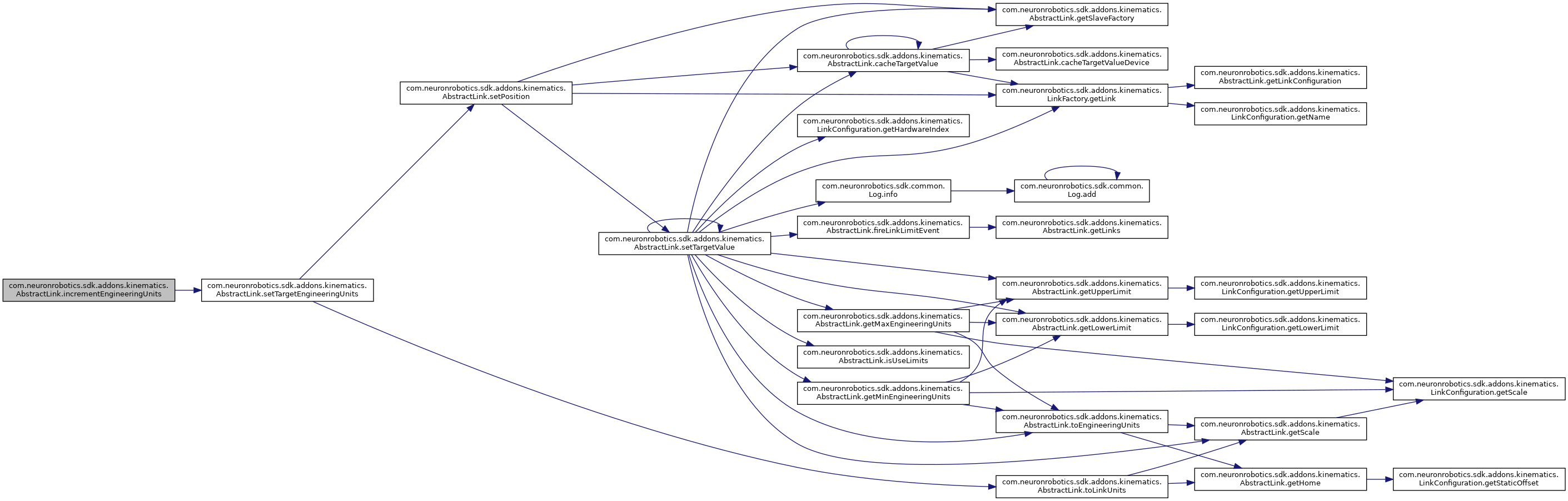
◆ incrementEngineeringUnits()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.incrementEngineeringUnits | ( | double | inc | ) |
Increment engineering units.
- Parameters
-
inc the inc
Definition at line 271 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.targetEngineeringUnits.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.incrementAngle(), and com.neuronrobotics.sdk.addons.kinematics.AbstractPrismaticLink.incrementDisplacment().
◆ isMaxEngineeringUnits()
| boolean com.neuronrobotics.sdk.addons.kinematics.AbstractLink.isMaxEngineeringUnits | ( | ) |
Checks if is max engineering units.
- Returns
- true, if is max engineering units
Definition at line 398 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getTargetValue(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getUpperLimit().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.isMaxAngle(), and com.neuronrobotics.sdk.addons.kinematics.AbstractPrismaticLink.isMaxDisplacment().

◆ isMinEngineeringUnits()
| boolean com.neuronrobotics.sdk.addons.kinematics.AbstractLink.isMinEngineeringUnits | ( | ) |
Checks if is min engineering units.
- Returns
- true, if is min engineering units
Definition at line 410 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLowerLimit(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getTargetValue().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.isMinAngle(), and com.neuronrobotics.sdk.addons.kinematics.AbstractPrismaticLink.isMinDisplacment().

◆ isUseLimits()
| boolean com.neuronrobotics.sdk.addons.kinematics.AbstractLink.isUseLimits | ( | ) |
Checks if is use limits.
- Returns
- true, if is use limits
Definition at line 617 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.useLimits.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue().
◆ removeAllLinkListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.removeAllLinkListener | ( | ) |
Removes the all link listener.
Definition at line 660 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.links.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.refreshHardwareLayer().
◆ removeChangeListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.removeChangeListener | ( | ILinkConfigurationChangeListener | l | ) |
Definition at line 689 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.removeChangeListener().

◆ removeLinkListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.removeLinkListener | ( | ILinkListener | l | ) |
Removes the link listener.
- Parameters
-
l the l
Definition at line 221 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLinks().

◆ setCurrentAsLowerLimit()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentAsLowerLimit | ( | ) |
Sets the current as lower limit.
Definition at line 599 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getCurrentPosition(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLowerLimit().

◆ setCurrentAsUpperLimit()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentAsUpperLimit | ( | ) |
Sets the current as upper limit.
Definition at line 592 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getCurrentPosition(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperLimit().

◆ setCurrentEngineeringUnits()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentEngineeringUnits | ( | double | angle | ) |
Sets the current engineering units.
- Parameters
-
angle the new current engineering units
Definition at line 298 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getCurrentPosition(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getHome(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setScale().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.setCurrentAsAngle(), and com.neuronrobotics.sdk.addons.kinematics.AbstractPrismaticLink.setCurrentAsDisplacment().

◆ setDeviceMaximumValue()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setDeviceMaximumValue | ( | double | max | ) |
Override this method to specify a larger range
Definition at line 63 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMax().

◆ setDeviceMinimumValue()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setDeviceMinimumValue | ( | double | min | ) |
Override this method to specify a larger range
Definition at line 70 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMin().

◆ setGlobalPositionListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setGlobalPositionListener | ( | Object | Object | ) |
Definition at line 664 of file AbstractLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateLimb().
◆ setHome()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setHome | ( | int | home | ) |
Sets the home.
- Parameters
-
home the new home
Definition at line 540 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setStaticOffset().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.MockRotoryLink().

◆ setLinkConfiguration()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setLinkConfiguration | ( | LinkConfiguration | conf | ) |
Sets the link configuration.
- Parameters
-
conf the new link configuration
Definition at line 626 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal().
◆ setLinks()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setLinks | ( | ArrayList< ILinkListener > | links | ) |
Sets the links.
- Parameters
-
links the new links
Definition at line 653 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.links.
◆ setLowerLimit()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setLowerLimit | ( | int | lowerLimit | ) |
Sets the lower limit.
- Parameters
-
lowerLimit the new lower limit
Definition at line 531 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLowerLimit().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.MockRotoryLink().

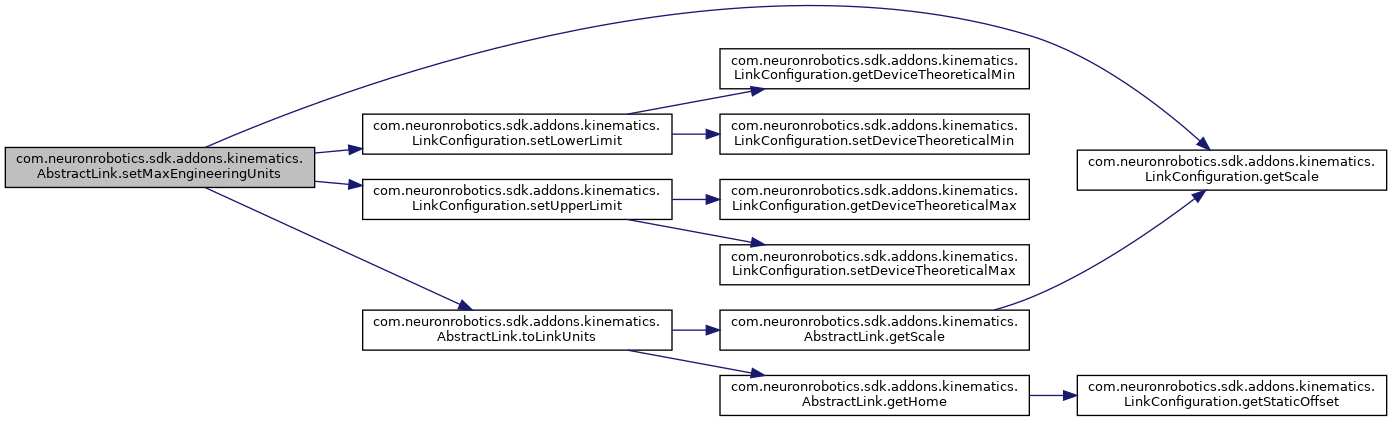
◆ setMaxEngineeringUnits()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMaxEngineeringUnits | ( | double | maxLimit | ) |
Sets the lower limit.
- Parameters
-
lowerLimit the new lower limit
Definition at line 368 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getScale(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperLimit(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toLinkUnits().
◆ setMaxVelocityEngineeringUnits()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMaxVelocityEngineeringUnits | ( | double | max | ) |
Gets the max engineering units.
- Returns
- the max engineering units
Definition at line 389 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperVelocity(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toLinkUnits().

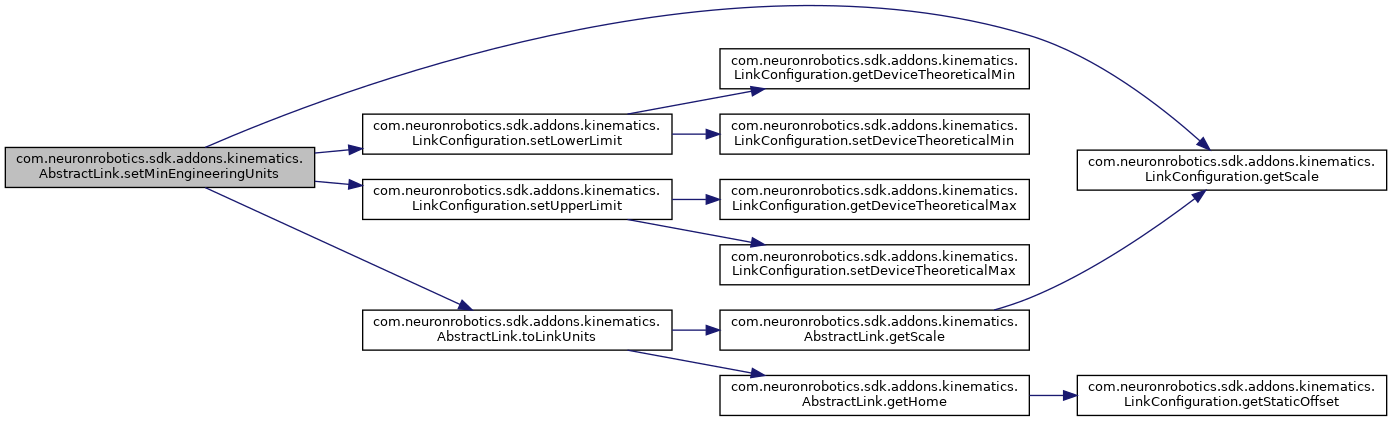
◆ setMinEngineeringUnits()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMinEngineeringUnits | ( | double | minLimit | ) |
Sets the upper limit.
- Parameters
-
upperLimit the new upper limit
Definition at line 356 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getScale(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperLimit(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toLinkUnits().
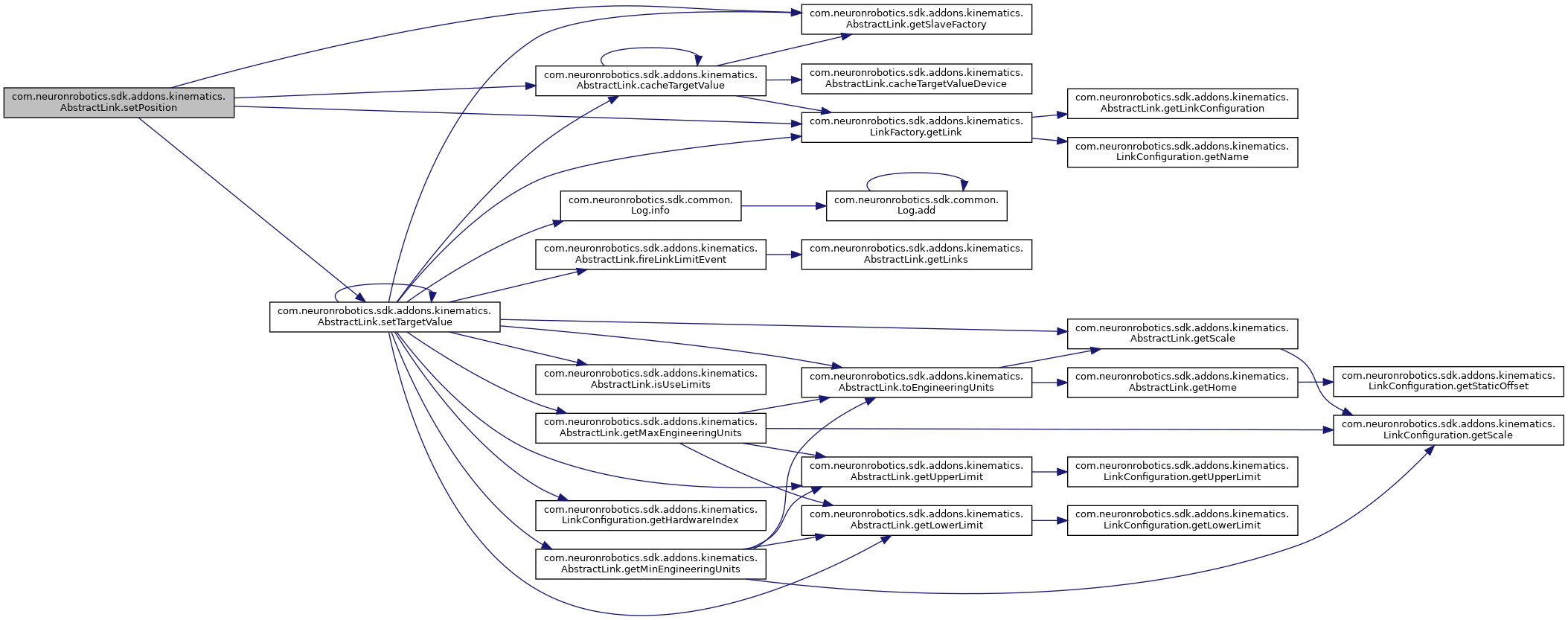
◆ setPosition()
|
protected |
Sets the position.
- Parameters
-
val the new position
Definition at line 422 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.cacheTargetValue(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getSlaveFactory(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.slaveLinks.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetEngineeringUnits().
◆ setScale()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setScale | ( | double | d | ) |
Sets the scale.
- Parameters
-
d the new scale
Definition at line 549 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setScale().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.MockRotoryLink().

◆ setSlaveFactory()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setSlaveFactory | ( | LinkFactory | slaveFactory | ) |
Definition at line 679 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.slaveFactory.
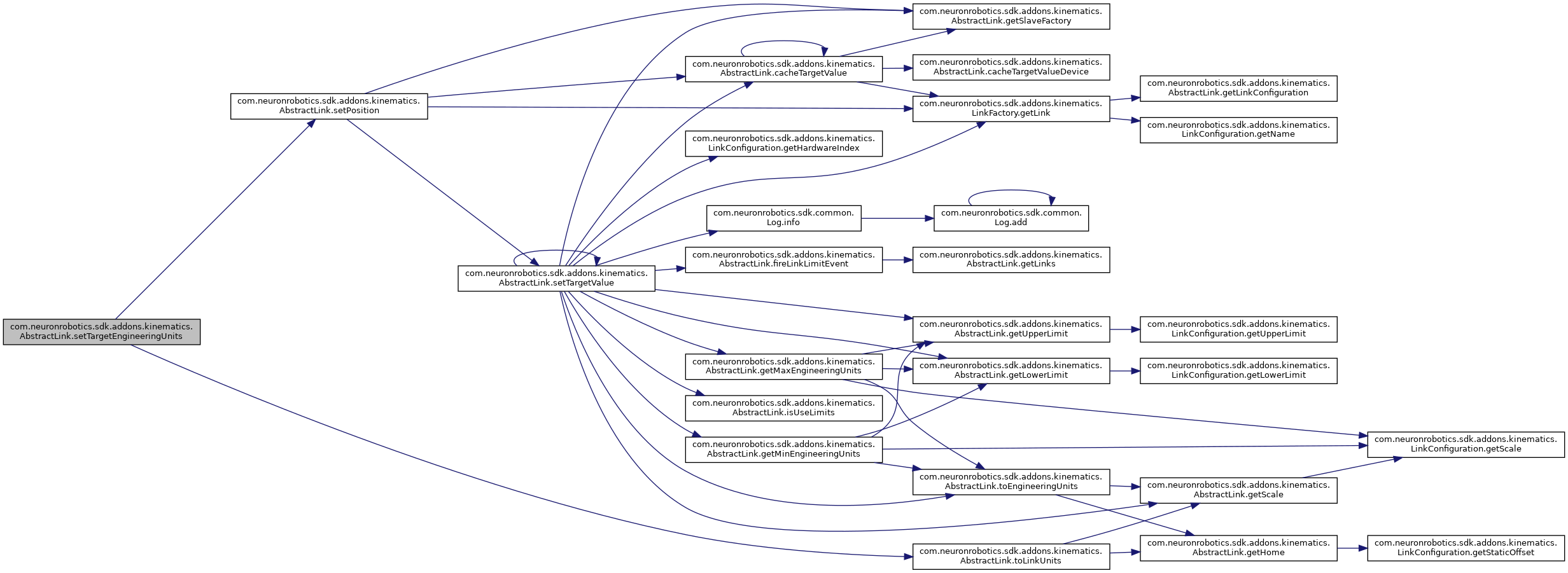
◆ setTargetEngineeringUnits()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetEngineeringUnits | ( | double | pos | ) |
Sets the target engineering units.
- Parameters
-
pos the new target engineering units
Definition at line 280 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setPosition(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.targetEngineeringUnits, and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toLinkUnits().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.incrementEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.setTargetAngle(), and com.neuronrobotics.sdk.addons.kinematics.AbstractPrismaticLink.setTargetDisplacment().
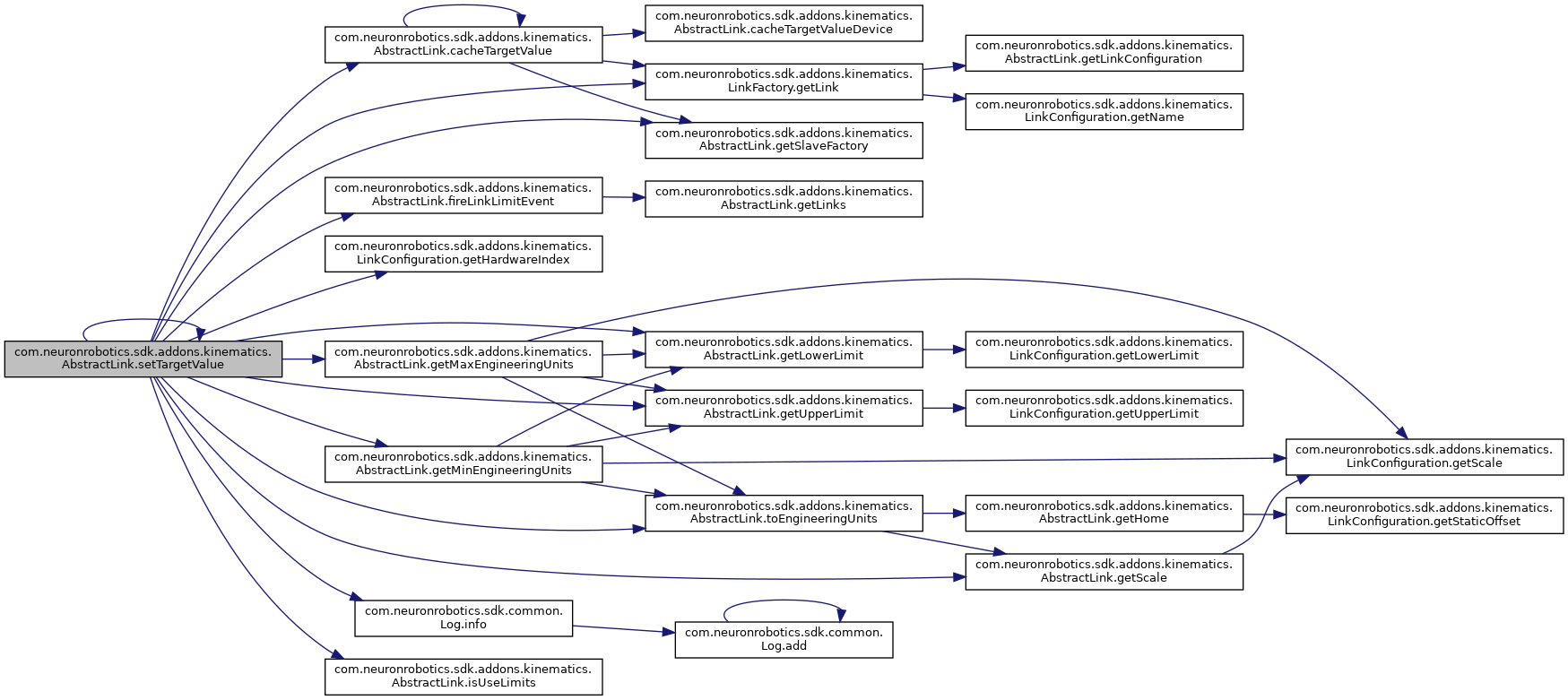
◆ setTargetValue()
|
protected |
Sets the target value.
- Parameters
-
val the new target value
Definition at line 441 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.cacheTargetValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.AbstractLink.fireLinkLimitEvent(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMinEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getScale(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getSlaveFactory(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getUpperLimit(), com.neuronrobotics.sdk.common.Log.info(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.isUseLimits(), com.neuronrobotics.sdk.pid.PIDLimitEventType.LOWERLIMIT, com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.slaveLinks, com.neuronrobotics.sdk.addons.kinematics.AbstractLink.targetValue, com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toEngineeringUnits(), and com.neuronrobotics.sdk.pid.PIDLimitEventType.UPPERLIMIT.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.Home(), com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.MockRotoryLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setPosition(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue().
◆ setUpperLimit()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setUpperLimit | ( | int | upperLimit | ) |
Sets the upper limit.
- Parameters
-
upperLimit the new upper limit
Definition at line 522 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperLimit().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.MockRotoryLink().

◆ setUseLimits()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setUseLimits | ( | boolean | useLimits | ) |
Sets the use limits.
- Parameters
-
useLimits the new use limits
Definition at line 608 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.useLimits.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.throwExceptionOnJointLimit().
◆ toEngineeringUnits()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toEngineeringUnits | ( | double | value | ) |
To engineering units.
- Parameters
-
value the value
- Returns
- the double
Definition at line 190 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getHome(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getScale().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.fireLinkListener(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getCurrentEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMinEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxVelocityEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMinEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getTargetEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue().

◆ toLinkUnits()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toLinkUnits | ( | double | euValue | ) |
To link units.
- Parameters
-
euValue the eu value
- Returns
- the int
Definition at line 200 of file AbstractLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getHome(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getScale().
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.printError(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMaxVelocityEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMinEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetEngineeringUnits().

Member Data Documentation
◆ conf
|
private |
The conf.
Definition at line 34 of file AbstractLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.AbstractLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractPrismaticLink.AbstractPrismaticLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.AbstractRotoryLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.addChangeListener(), com.neuronrobotics.sdk.addons.kinematics.AnalogPrismaticLink.AnalogPrismaticLink(), com.neuronrobotics.sdk.addons.kinematics.AnalogRotoryLink.AnalogRotoryLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.clearChangeListener(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GCodeHeater.GCodeHeater(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodePrismatic.GcodePrismatic(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeRotory.GcodeRotory(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMaximumValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMinEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMinimumValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getHome(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxVelocityEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMinEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getScale(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getUpperLimit(), com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.MockRotoryLink(), com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.PidPrismaticLink(), com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.PidRotoryLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.removeChangeListener(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentAsLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentAsUpperLimit(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setDeviceMaximumValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setDeviceMinimumValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setHome(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setLinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMaxVelocityEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMinEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setScale(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setUpperLimit().
◆ imu
The object for communicating IMU information and registering it with the hardware
Definition at line 45 of file AbstractLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getImu().
◆ links
|
private |
The links.
Definition at line 31 of file AbstractLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLinks(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.removeAllLinkListener(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setLinks().
◆ linksLocation
|
private |
Definition at line 40 of file AbstractLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getGlobalPositionListener().
◆ slaveFactory
|
private |
Definition at line 36 of file AbstractLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getSlaveFactory(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setSlaveFactory().
◆ slaveLinks
|
private |
Definition at line 35 of file AbstractLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.AbstractLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.cacheTargetValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flush(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flushAll(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setPosition(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue().
◆ targetEngineeringUnits
|
private |
The target engineering units.
Definition at line 28 of file AbstractLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.incrementEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetEngineeringUnits().
◆ targetValue
|
private |
The target value.
Definition at line 25 of file AbstractLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getTargetValue(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue().
◆ useLimits
|
private |
The use limits.
Definition at line 38 of file AbstractLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.isUseLimits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setUseLimits().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/AbstractLink.java