Public Member Functions | |
| PIDEvent () | |
| PIDEvent (int chan, float tick, long time, int velocity) | |
| void | set (int chan, float tick, long time, int velocity) |
| PIDEvent (BowlerDatagram data) | |
| void | setGroup (int channel) |
| int | getGroup () |
| void | setValue (float ticks) |
| float | getValue () |
| void | setTimeStamp (long timeStamp) |
| long | getTimeStamp () |
| String | toString () |
| void | setVelocity (int vel) |
| int | getVelocity () |
Private Attributes | |
| int | channel |
| float | ticks |
| long | timeStamp |
| int | velocity |
Detailed Description
The Class PIDEvent.
Definition at line 10 of file PIDEvent.java.
Constructor & Destructor Documentation
◆ PIDEvent() [1/3]
| com.neuronrobotics.sdk.pid.PIDEvent.PIDEvent | ( | ) |
Definition at line 24 of file PIDEvent.java.
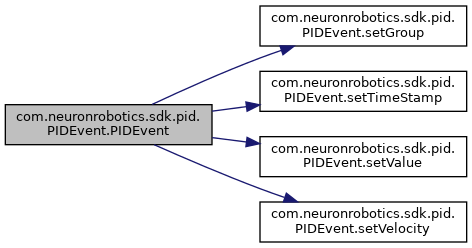
◆ PIDEvent() [2/3]
| com.neuronrobotics.sdk.pid.PIDEvent.PIDEvent | ( | int | chan, |
| float | tick, | ||
| long | time, | ||
| int | velocity | ||
| ) |
Instantiates a new PID event.
- Parameters
-
chan the chan tick the tick time the time velocity the velocity
Definition at line 36 of file PIDEvent.java.
References com.neuronrobotics.sdk.pid.PIDEvent.setGroup(), com.neuronrobotics.sdk.pid.PIDEvent.setTimeStamp(), com.neuronrobotics.sdk.pid.PIDEvent.setValue(), com.neuronrobotics.sdk.pid.PIDEvent.setVelocity(), and com.neuronrobotics.sdk.pid.PIDEvent.velocity.
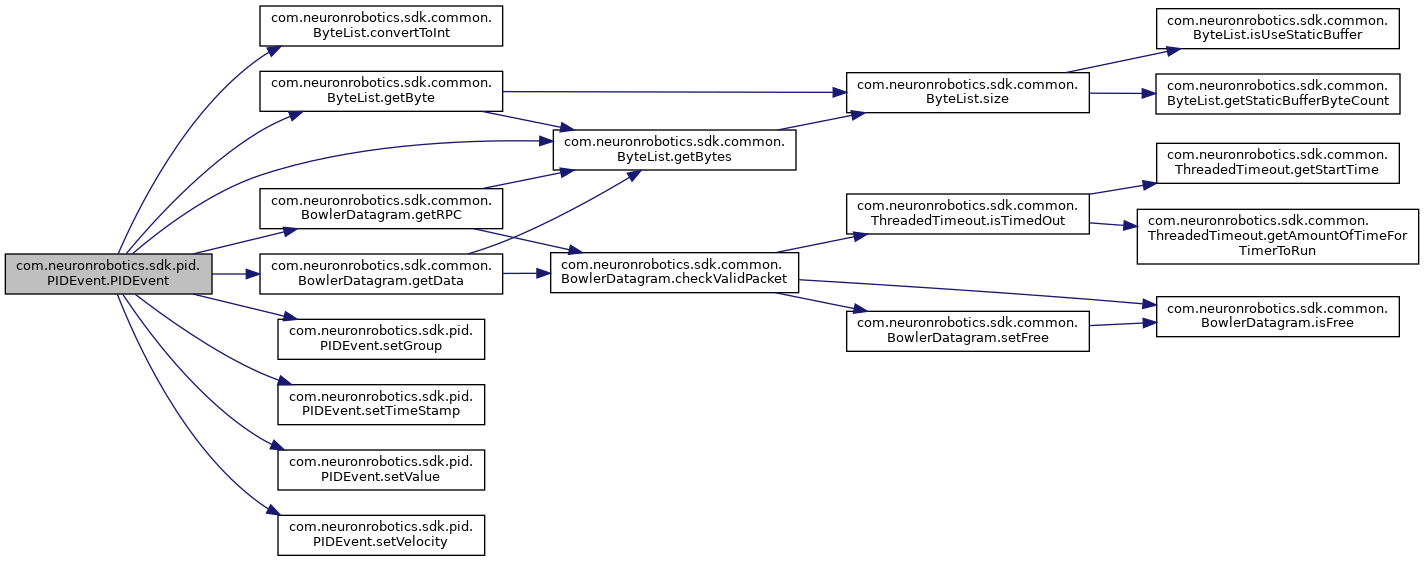
◆ PIDEvent() [3/3]
| com.neuronrobotics.sdk.pid.PIDEvent.PIDEvent | ( | BowlerDatagram | data | ) |
Instantiates a new PID event.
- Parameters
-
data the data
Definition at line 61 of file PIDEvent.java.
References com.neuronrobotics.sdk.common.ByteList.convertToInt(), com.neuronrobotics.sdk.common.ByteList.getByte(), com.neuronrobotics.sdk.common.ByteList.getBytes(), com.neuronrobotics.sdk.common.BowlerDatagram.getData(), com.neuronrobotics.sdk.common.BowlerDatagram.getRPC(), com.neuronrobotics.sdk.pid.PIDEvent.setGroup(), com.neuronrobotics.sdk.pid.PIDEvent.setTimeStamp(), com.neuronrobotics.sdk.pid.PIDEvent.setValue(), and com.neuronrobotics.sdk.pid.PIDEvent.setVelocity().
Member Function Documentation
◆ getGroup()
| int com.neuronrobotics.sdk.pid.PIDEvent.getGroup | ( | ) |
Gets the group.
- Returns
- the group
Definition at line 85 of file PIDEvent.java.
References com.neuronrobotics.sdk.pid.PIDEvent.channel.
Referenced by com.neuronrobotics.sdk.namespace.bcs.pid.AbstractPidNamespaceImp.AbstractPidNamespaceImp(), com.neuronrobotics.sdk.namespace.bcs.pid.AbstractPidNamespaceImp.firePIDEvent(), and com.neuronrobotics.sdk.pid.PIDChannel.setPid().
◆ getTimeStamp()
| long com.neuronrobotics.sdk.pid.PIDEvent.getTimeStamp | ( | ) |
Gets the time stamp.
- Returns
- the time stamp
Definition at line 121 of file PIDEvent.java.
References com.neuronrobotics.sdk.pid.PIDEvent.timeStamp.
Referenced by com.neuronrobotics.sdk.namespace.bcs.pid.AbstractPidNamespaceImp.firePIDEvent().
◆ getValue()
| float com.neuronrobotics.sdk.pid.PIDEvent.getValue | ( | ) |
Gets the value.
- Returns
- the value
Definition at line 103 of file PIDEvent.java.
References com.neuronrobotics.sdk.pid.PIDEvent.ticks.
Referenced by com.neuronrobotics.sdk.namespace.bcs.pid.AbstractPidNamespaceImp.AbstractPidNamespaceImp(), com.neuronrobotics.sdk.namespace.bcs.pid.AbstractPidNamespaceImp.firePIDEvent(), com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.setPIDChannel(), and com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.setPIDChannel().
◆ getVelocity()
| int com.neuronrobotics.sdk.pid.PIDEvent.getVelocity | ( | ) |
Gets the velocity.
- Returns
- the velocity
Definition at line 147 of file PIDEvent.java.
References com.neuronrobotics.sdk.pid.PIDEvent.velocity.
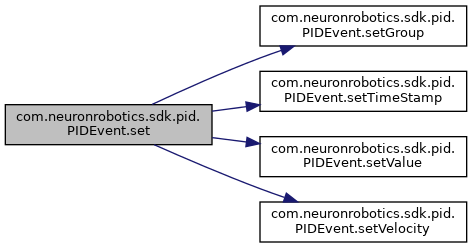
◆ set()
| void com.neuronrobotics.sdk.pid.PIDEvent.set | ( | int | chan, |
| float | tick, | ||
| long | time, | ||
| int | velocity | ||
| ) |
Sets new PID event.
- Parameters
-
chan the chan tick the tick time the time velocity the velocity
Definition at line 50 of file PIDEvent.java.
References com.neuronrobotics.sdk.pid.PIDEvent.setGroup(), com.neuronrobotics.sdk.pid.PIDEvent.setTimeStamp(), com.neuronrobotics.sdk.pid.PIDEvent.setValue(), com.neuronrobotics.sdk.pid.PIDEvent.setVelocity(), and com.neuronrobotics.sdk.pid.PIDEvent.velocity.
Referenced by com.neuronrobotics.sdk.pid.VirtualGenericPIDDevice.SyncThread.run().
◆ setGroup()
| void com.neuronrobotics.sdk.pid.PIDEvent.setGroup | ( | int | channel | ) |
Sets the group.
- Parameters
-
channel the new group
Definition at line 76 of file PIDEvent.java.
References com.neuronrobotics.sdk.pid.PIDEvent.channel.
Referenced by com.neuronrobotics.sdk.pid.PIDEvent.PIDEvent(), and com.neuronrobotics.sdk.pid.PIDEvent.set().
◆ setTimeStamp()
| void com.neuronrobotics.sdk.pid.PIDEvent.setTimeStamp | ( | long | timeStamp | ) |
Sets the time stamp.
- Parameters
-
timeStamp the new time stamp
Definition at line 112 of file PIDEvent.java.
References com.neuronrobotics.sdk.pid.PIDEvent.timeStamp.
Referenced by com.neuronrobotics.sdk.pid.PIDEvent.PIDEvent(), and com.neuronrobotics.sdk.pid.PIDEvent.set().
◆ setValue()
| void com.neuronrobotics.sdk.pid.PIDEvent.setValue | ( | float | ticks | ) |
Sets the value.
- Parameters
-
ticks the new value
Definition at line 94 of file PIDEvent.java.
References com.neuronrobotics.sdk.pid.PIDEvent.ticks.
Referenced by com.neuronrobotics.sdk.pid.PIDEvent.PIDEvent(), and com.neuronrobotics.sdk.pid.PIDEvent.set().
◆ setVelocity()
| void com.neuronrobotics.sdk.pid.PIDEvent.setVelocity | ( | int | vel | ) |
Sets the velocity.
- Parameters
-
vel the new velocity
Definition at line 138 of file PIDEvent.java.
Referenced by com.neuronrobotics.sdk.pid.PIDEvent.PIDEvent(), and com.neuronrobotics.sdk.pid.PIDEvent.set().
◆ toString()
| String com.neuronrobotics.sdk.pid.PIDEvent.toString | ( | ) |
Definition at line 129 of file PIDEvent.java.
References com.neuronrobotics.sdk.pid.PIDEvent.channel, com.neuronrobotics.sdk.pid.PIDEvent.ticks, com.neuronrobotics.sdk.pid.PIDEvent.timeStamp, and com.neuronrobotics.sdk.pid.PIDEvent.velocity.
Member Data Documentation
◆ channel
|
private |
The channel.
Definition at line 13 of file PIDEvent.java.
Referenced by com.neuronrobotics.sdk.pid.PIDEvent.getGroup(), com.neuronrobotics.sdk.pid.PIDEvent.setGroup(), and com.neuronrobotics.sdk.pid.PIDEvent.toString().
◆ ticks
|
private |
The ticks.
Definition at line 16 of file PIDEvent.java.
Referenced by com.neuronrobotics.sdk.pid.PIDEvent.getValue(), com.neuronrobotics.sdk.pid.PIDEvent.setValue(), and com.neuronrobotics.sdk.pid.PIDEvent.toString().
◆ timeStamp
|
private |
The time stamp.
Definition at line 19 of file PIDEvent.java.
Referenced by com.neuronrobotics.sdk.pid.PIDEvent.getTimeStamp(), com.neuronrobotics.sdk.pid.PIDEvent.setTimeStamp(), and com.neuronrobotics.sdk.pid.PIDEvent.toString().
◆ velocity
|
private |
The velocity.
Definition at line 22 of file PIDEvent.java.
Referenced by com.neuronrobotics.sdk.pid.PIDEvent.getVelocity(), com.neuronrobotics.sdk.pid.PIDEvent.PIDEvent(), com.neuronrobotics.sdk.pid.PIDEvent.set(), and com.neuronrobotics.sdk.pid.PIDEvent.toString().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/pid/PIDEvent.java