
Static Public Member Functions | |
| static void | addLinkProvider (String typeTag, INewLinkProvider provider) |
| static boolean | linkProviderExists (String typeTag) |
Private Member Functions | |
| AbstractLink | getLinkLocal (LinkConfiguration c) |
Private Attributes | |
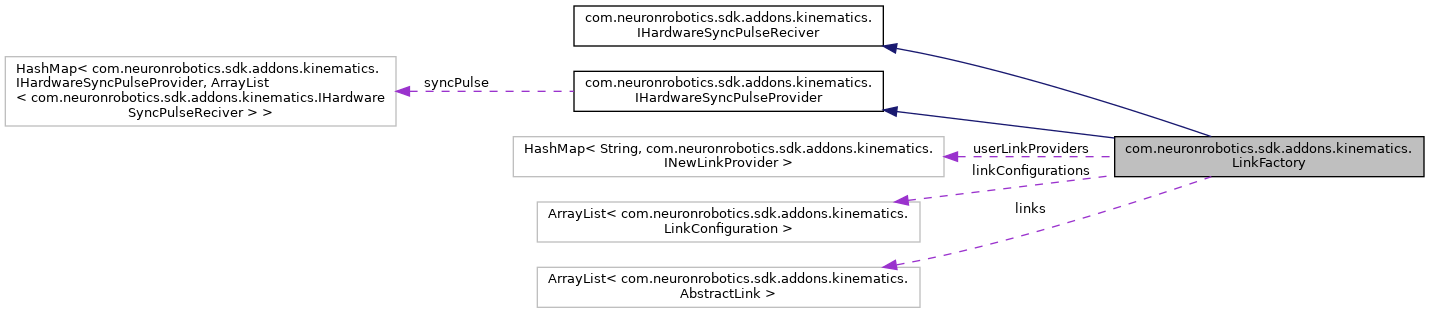
| ArrayList< AbstractLink > | links = new ArrayList<AbstractLink>() |
| ArrayList< LinkConfiguration > | linkConfigurations = null |
Static Private Attributes | |
| static HashMap< String, INewLinkProvider > | userLinkProviders = new HashMap<String, INewLinkProvider>() |
Additional Inherited Members | |
 Public Attributes inherited from com.neuronrobotics.sdk.addons.kinematics.IHardwareSyncPulseProvider Public Attributes inherited from com.neuronrobotics.sdk.addons.kinematics.IHardwareSyncPulseProvider | |
| HashMap< IHardwareSyncPulseProvider, ArrayList< IHardwareSyncPulseReciver > > | syncPulse =new HashMap<>() |
Detailed Description
A factory for creating Link objects.
Definition at line 27 of file LinkFactory.java.
Constructor & Destructor Documentation
◆ LinkFactory() [1/3]
| com.neuronrobotics.sdk.addons.kinematics.LinkFactory.LinkFactory | ( | ) |
Instantiates a new link factory.
Definition at line 61 of file LinkFactory.java.
◆ LinkFactory() [2/3]
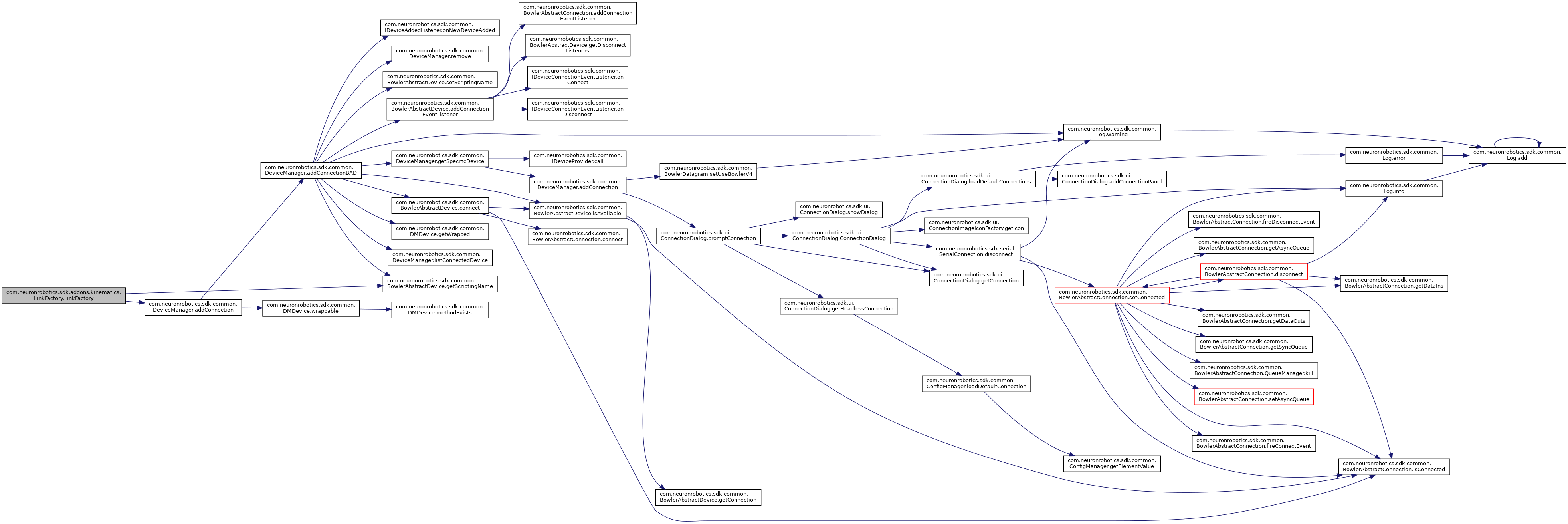
| com.neuronrobotics.sdk.addons.kinematics.LinkFactory.LinkFactory | ( | BowlerAbstractDevice | bad | ) |
Instantiates a new link factory.
- Parameters
-
bad the bad
Definition at line 70 of file LinkFactory.java.
References com.neuronrobotics.sdk.common.DeviceManager.addConnection(), and com.neuronrobotics.sdk.common.BowlerAbstractDevice.getScriptingName().
◆ LinkFactory() [3/3]
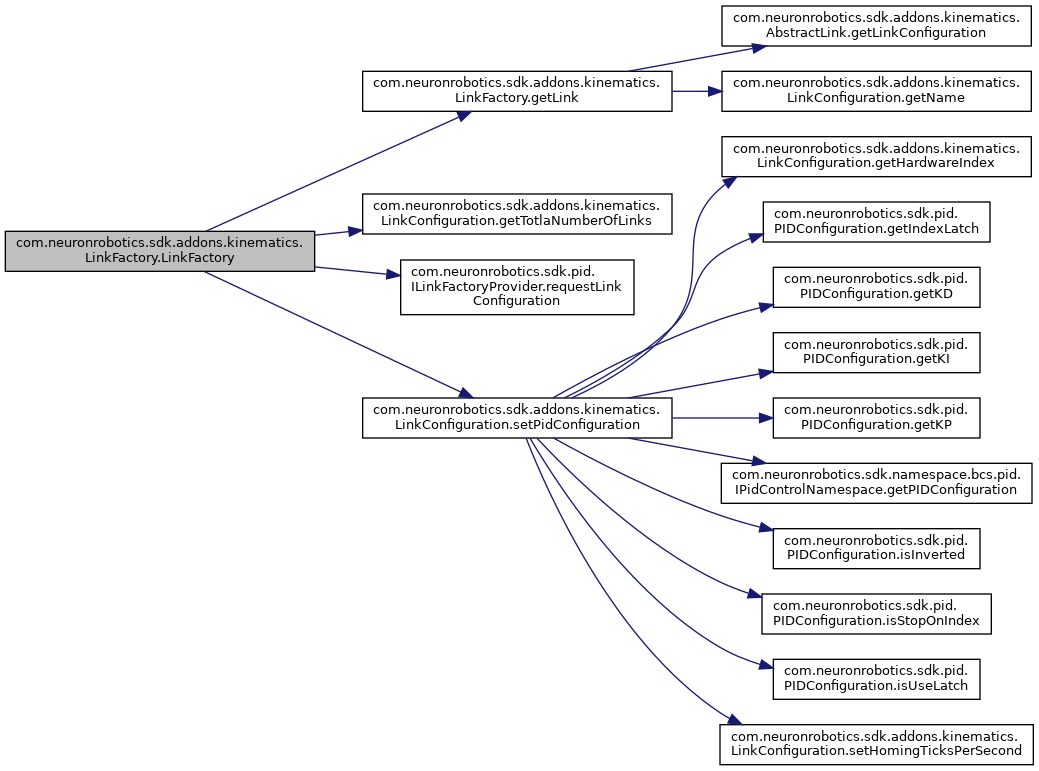
| com.neuronrobotics.sdk.addons.kinematics.LinkFactory.LinkFactory | ( | ILinkFactoryProvider | connection, |
| IExtendedPIDControl | d | ||
| ) |
Instantiates a new link factory.
- Parameters
-
connection the connection d the d
Definition at line 81 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTotlaNumberOfLinks(), com.neuronrobotics.sdk.pid.ILinkFactoryProvider.requestLinkConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPidConfiguration().
Member Function Documentation
◆ addLink()
| void com.neuronrobotics.sdk.addons.kinematics.LinkFactory.addLink | ( | AbstractLink | link | ) |
THis interface lets the user add a link after instantiation
- Parameters
-
link the link to be added in order
Definition at line 235 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkConfigurations(), and com.neuronrobotics.sdk.addons.kinematics.LinkFactory.links.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.removeLimb(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup().

◆ addLinkListener()
| void com.neuronrobotics.sdk.addons.kinematics.LinkFactory.addLinkListener | ( | ILinkListener | l | ) |
Adds the link listener.
- Parameters
-
l the l
Definition at line 272 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.links.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.removeLink().
◆ addLinkProvider()
|
static |
Add a new link provider
- Parameters
-
typeTag a string to link it to the string in the XML that determines type provider the provider module
Definition at line 43 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkType.addType(), and com.neuronrobotics.sdk.addons.kinematics.LinkFactory.userLinkProviders.

◆ deleteLink()
| void com.neuronrobotics.sdk.addons.kinematics.LinkFactory.deleteLink | ( | int | i | ) |
Delete link.
- Parameters
-
i the i
Definition at line 407 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkConfigurations(), and com.neuronrobotics.sdk.addons.kinematics.LinkFactory.links.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.removeLink().

◆ flush()
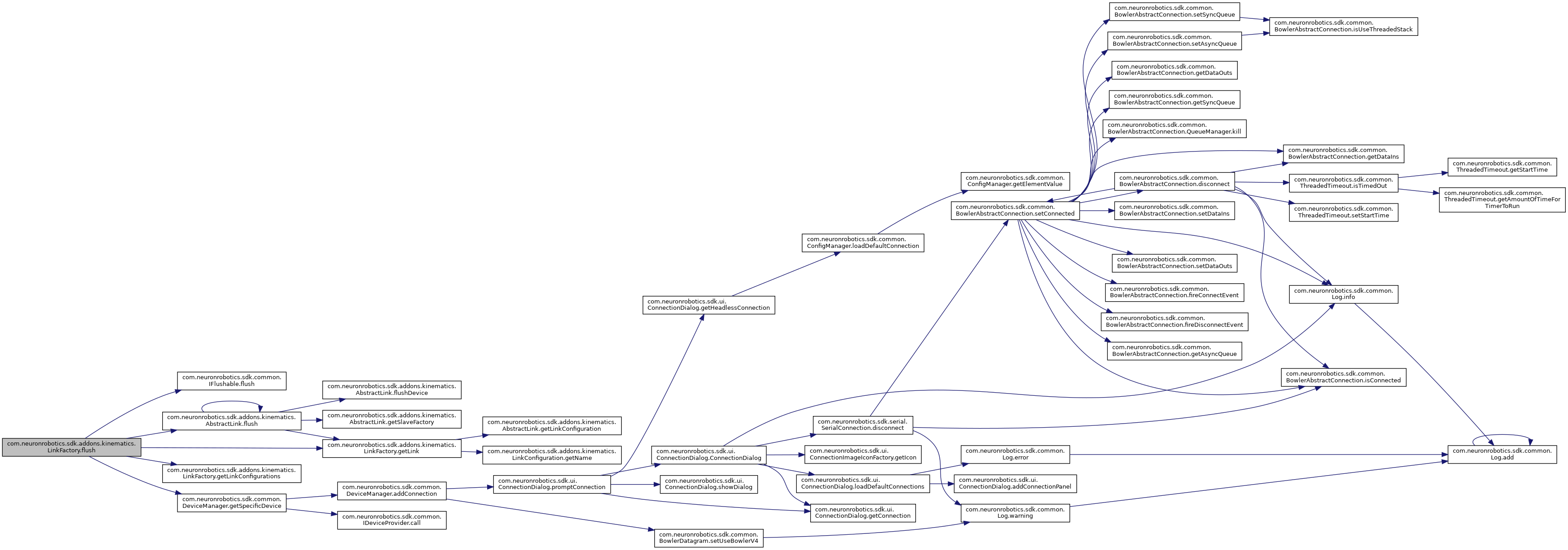
| void com.neuronrobotics.sdk.addons.kinematics.LinkFactory.flush | ( | final double | seconds | ) |
Flush.
- Parameters
-
seconds the seconds
Definition at line 283 of file LinkFactory.java.
References com.neuronrobotics.sdk.common.IFlushable.flush(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flush(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkConfigurations(), and com.neuronrobotics.sdk.common.DeviceManager.getSpecificDevice().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR._setDesiredJointSpaceVector().
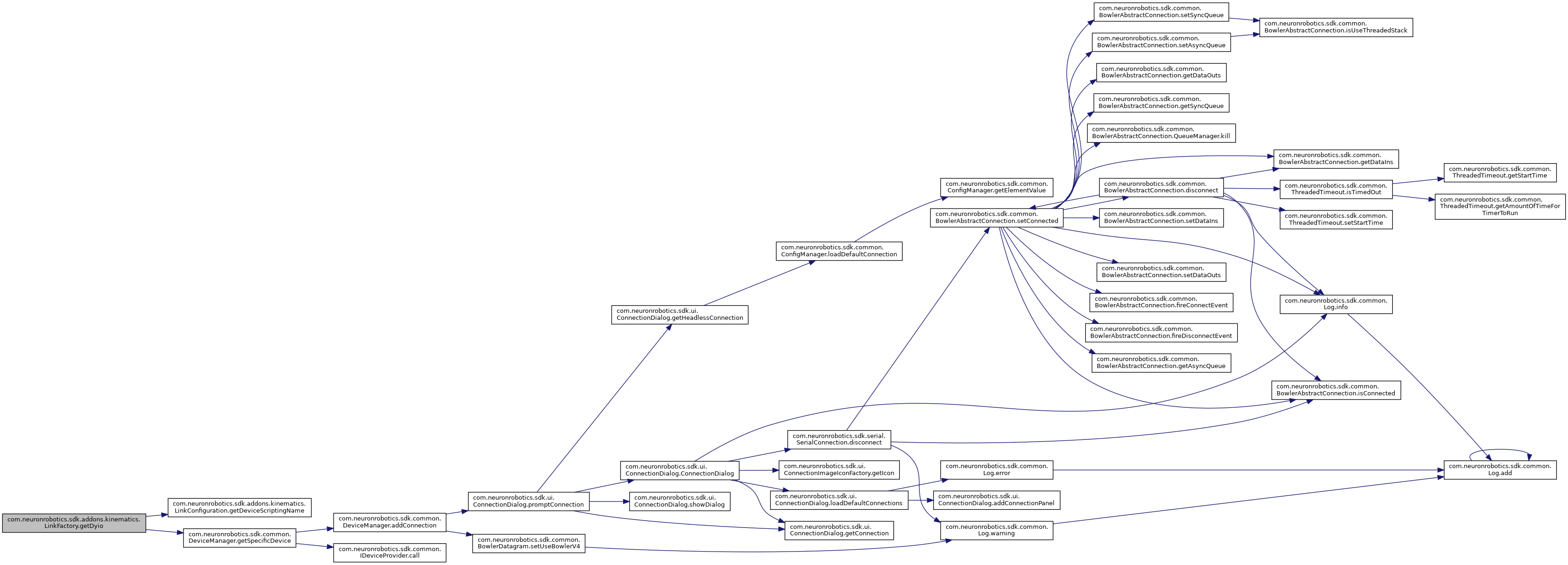
◆ getDyio()
| DyIO com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getDyio | ( | LinkConfiguration | c | ) |
Gets the dyio.
- Returns
- the dyio from the database.
Definition at line 325 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceScriptingName(), and com.neuronrobotics.sdk.common.DeviceManager.getSpecificDevice().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics(), and com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal().
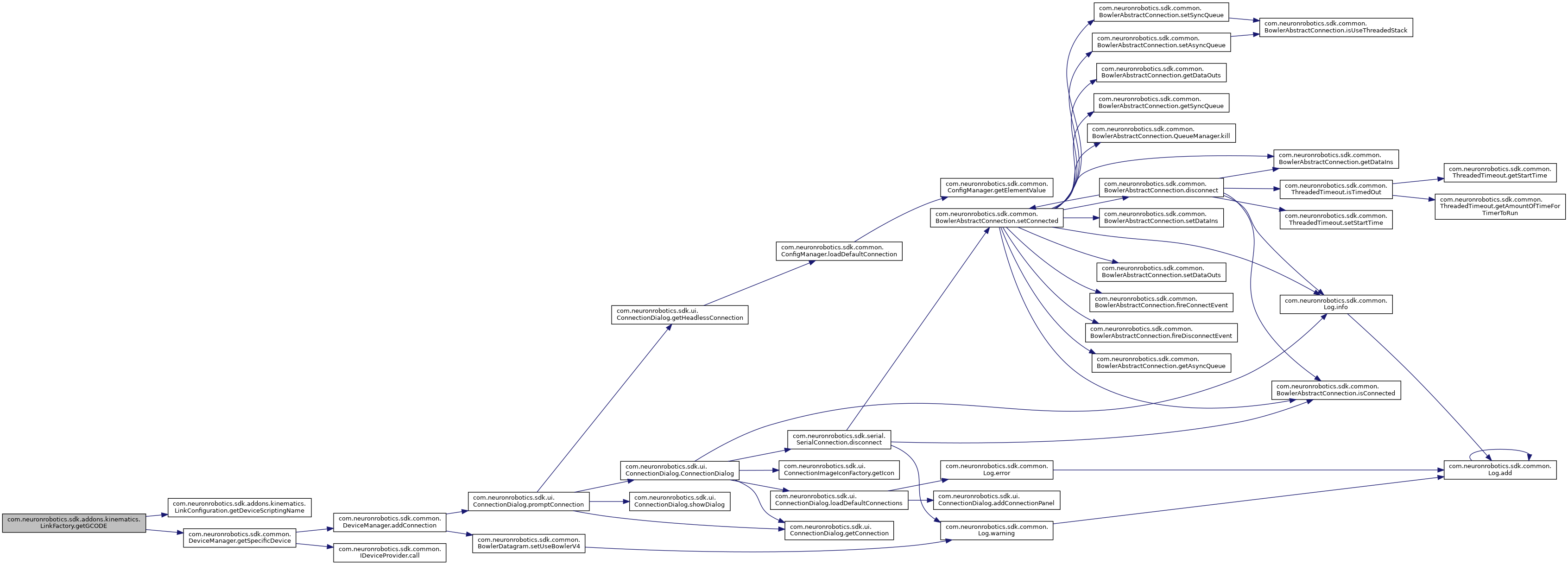
◆ getGCODE()
| GcodeDevice com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getGCODE | ( | LinkConfiguration | c | ) |
Gets the Gcode device from the database.
- Returns
- the GCODE device
Definition at line 336 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceScriptingName(), and com.neuronrobotics.sdk.common.DeviceManager.getSpecificDevice().
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal().
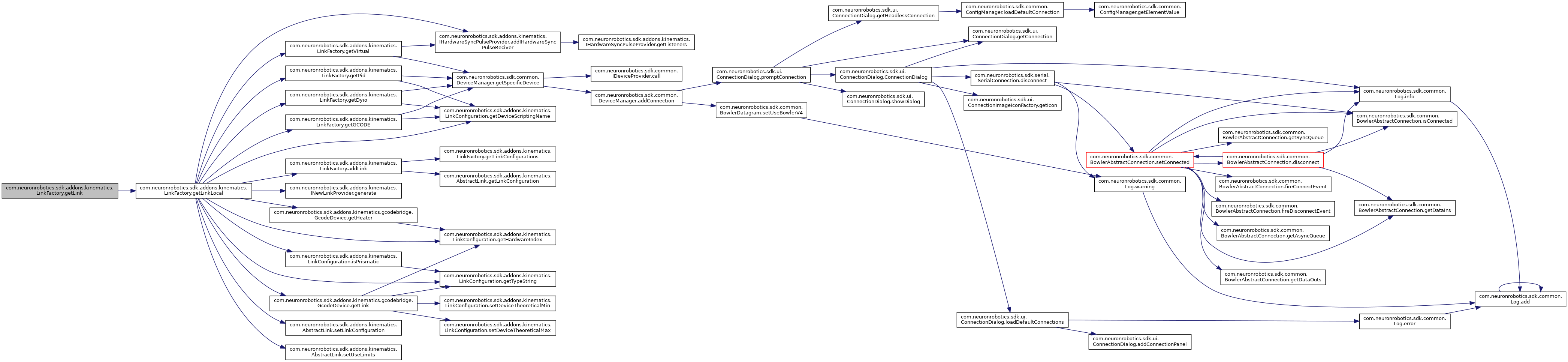
◆ getLink() [1/2]
| AbstractLink com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink | ( | LinkConfiguration | c | ) |
Gets the link.
- Parameters
-
c the c
- Returns
- the link
Definition at line 121 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal(), and com.neuronrobotics.sdk.addons.kinematics.LinkFactory.links.
◆ getLink() [2/2]
| AbstractLink com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink | ( | String | name | ) |
Gets the link.
- Parameters
-
name the name
- Returns
- the link
Definition at line 103 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getName(), and com.neuronrobotics.sdk.addons.kinematics.LinkFactory.links.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.AbstractLink(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.cacheTargetValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkVector(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flush(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.flush(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flushAll(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.generateCad(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.LinkFactory(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.refreshHardwareLayer(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setPosition(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup().

◆ getLinkConfigurations()
| ArrayList<LinkConfiguration> com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkConfigurations | ( | ) |
Gets the link configurations.
- Returns
- the link configurations
Definition at line 383 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.linkConfigurations.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.addLink(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.deleteLink(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.flush(), com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematicsMatrix(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.isConnected(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup().
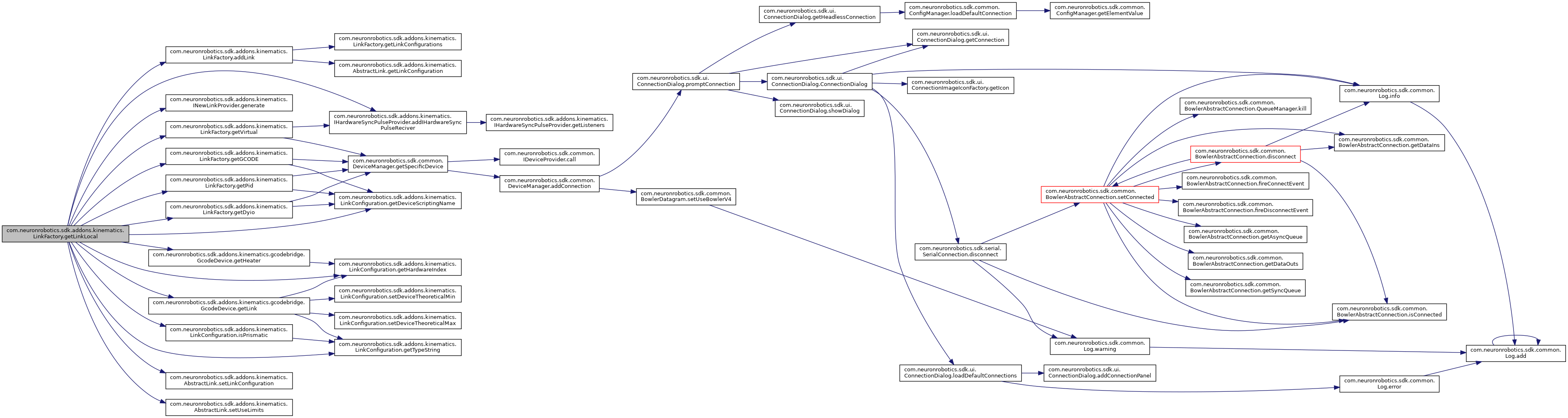
◆ getLinkLocal()
|
private |
Gets the link local.
- Parameters
-
c the c
- Returns
- the link local
Definition at line 152 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.IHardwareSyncPulseProvider.addIHardwareSyncPulseReciver(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.addLink(), com.neuronrobotics.sdk.addons.kinematics.INewLinkProvider.generate(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceScriptingName(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getDyio(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getGCODE(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getHeater(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getLink(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getPid(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTypeString(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getVirtual(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isPrismatic(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setLinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setUseLimits(), and com.neuronrobotics.sdk.addons.kinematics.LinkFactory.userLinkProviders.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), and com.neuronrobotics.sdk.addons.kinematics.LinkFactory.refreshHardwareLayer().
◆ getLowerLimits()
| double [] com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLowerLimits | ( | ) |
Gets the lower limits.
- Returns
- the lower limits
Definition at line 246 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.links.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.setFactory().
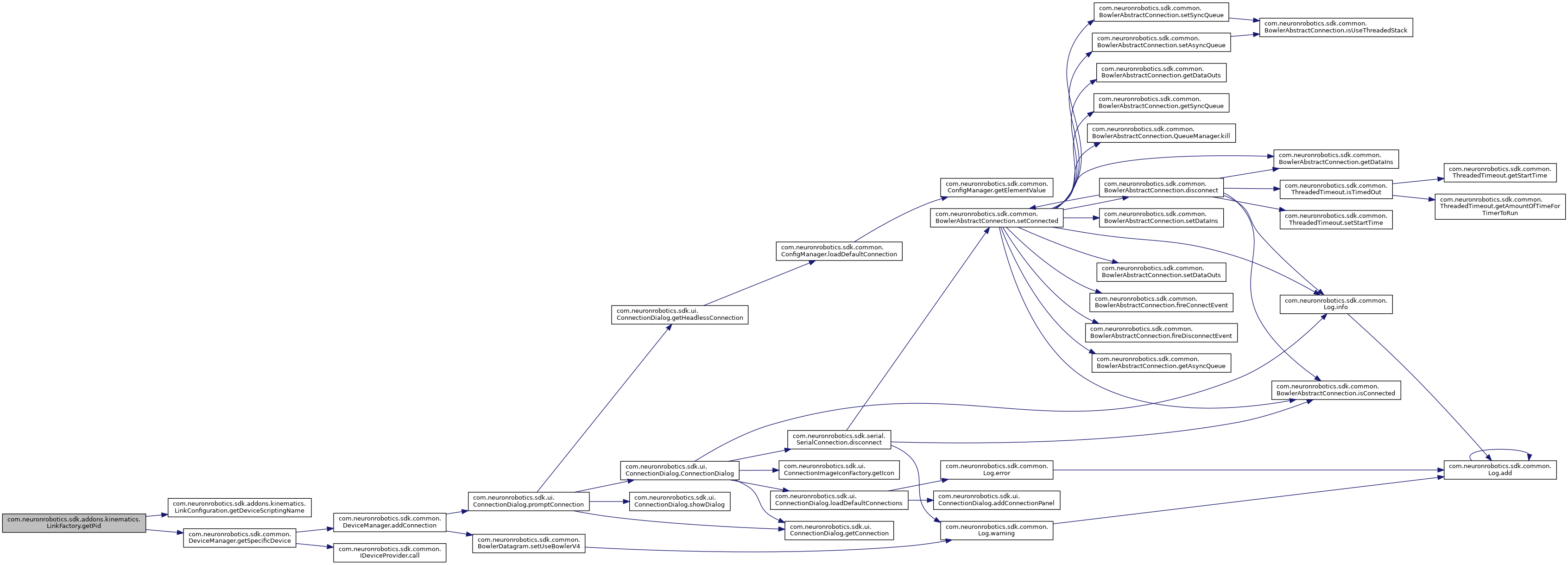
◆ getPid()
| IPidControlNamespace com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getPid | ( | LinkConfiguration | c | ) |
Gets the pid from the database..
- Returns
- the pid from the database.
Definition at line 313 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceScriptingName(), and com.neuronrobotics.sdk.common.DeviceManager.getSpecificDevice().
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal().
◆ getUpperLimits()
| double [] com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getUpperLimits | ( | ) |
Gets the upper limits.
- Returns
- the upper limits
Definition at line 259 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.links.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.setFactory().
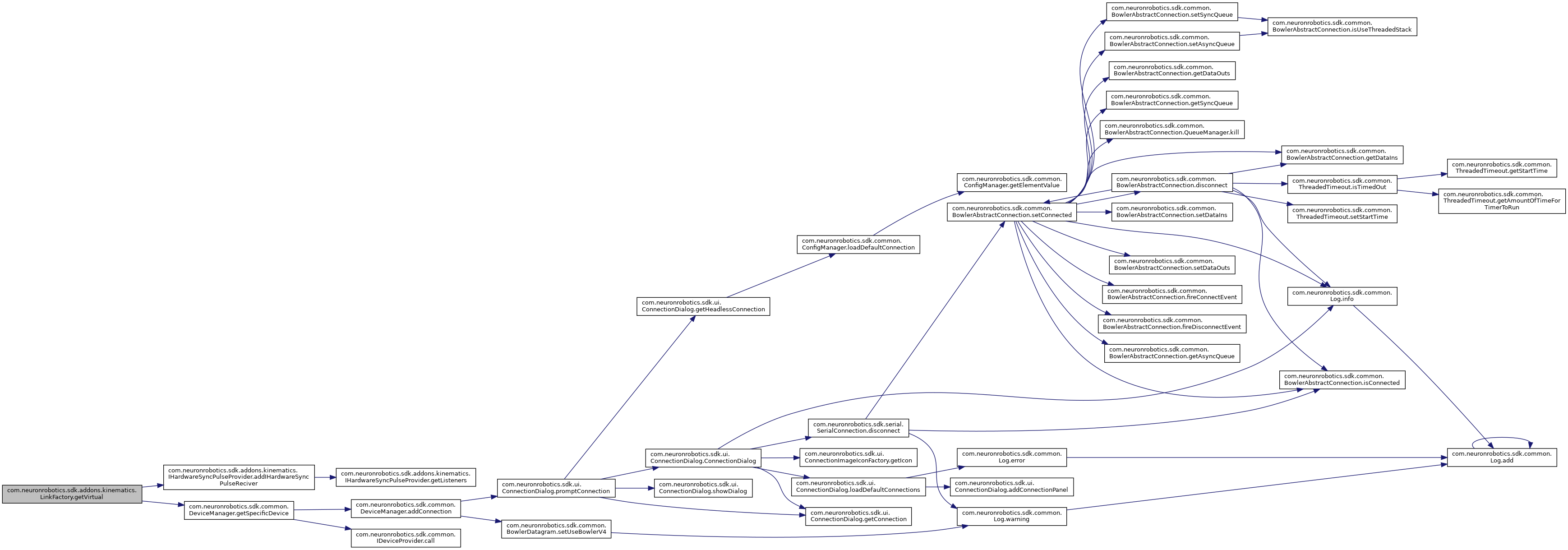
◆ getVirtual()
| VirtualGenericPIDDevice com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getVirtual | ( | String | myVirtualDevName | ) |
Definition at line 417 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.IHardwareSyncPulseProvider.addIHardwareSyncPulseReciver(), and com.neuronrobotics.sdk.common.DeviceManager.getSpecificDevice().
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal().
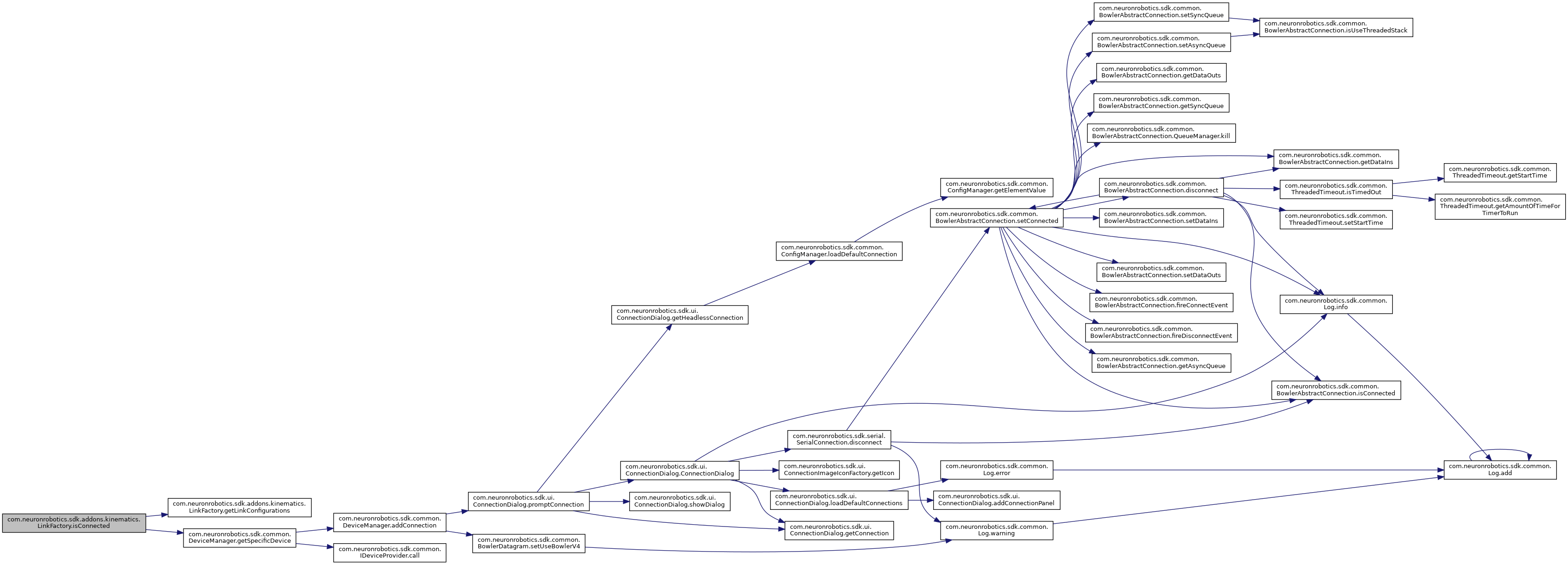
◆ isConnected()
| boolean com.neuronrobotics.sdk.addons.kinematics.LinkFactory.isConnected | ( | ) |
Checks if is connected.
- Returns
- true, if is connected
Definition at line 367 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkConfigurations(), and com.neuronrobotics.sdk.common.DeviceManager.getSpecificDevice().
◆ linkProviderExists()
|
static |
Check to see if link provider is already defined
- Parameters
-
typeTag
- Returns
Definition at line 54 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.userLinkProviders.
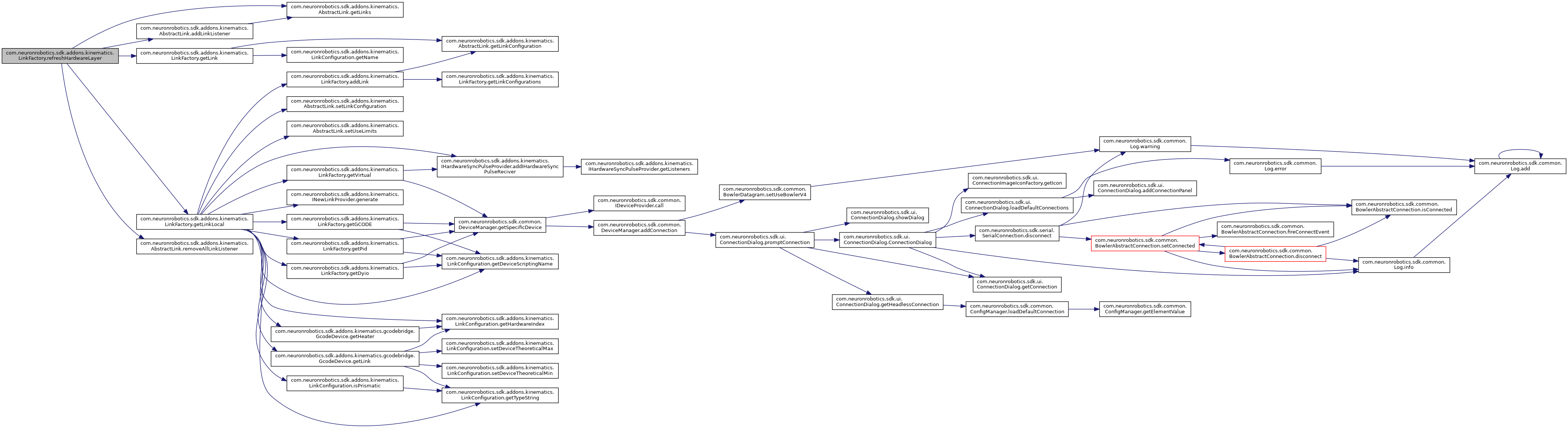
◆ refreshHardwareLayer()
| void com.neuronrobotics.sdk.addons.kinematics.LinkFactory.refreshHardwareLayer | ( | LinkConfiguration | c | ) |
Refresh hardware layer.
- Parameters
-
c the c
Definition at line 134 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.addLinkListener(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLinks(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.links, and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.removeAllLinkListener().
◆ removeLinkListener()
| void com.neuronrobotics.sdk.addons.kinematics.LinkFactory.removeLinkListener | ( | AbstractKinematicsNR | l | ) |
Removes the link listener.
- Parameters
-
l the l
Definition at line 395 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.links.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.removeLink().
◆ setCachedTargets()
| void com.neuronrobotics.sdk.addons.kinematics.LinkFactory.setCachedTargets | ( | double[] | jointSpaceVect | ) |
Sets the cached targets.
- Parameters
-
jointSpaceVect the new cached targets
Definition at line 347 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.links.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR._setDesiredJointSpaceVector().
◆ sync()
| void com.neuronrobotics.sdk.addons.kinematics.LinkFactory.sync | ( | ) |
Implements com.neuronrobotics.sdk.addons.kinematics.IHardwareSyncPulseReciver.
Definition at line 413 of file LinkFactory.java.
References com.neuronrobotics.sdk.addons.kinematics.IHardwareSyncPulseProvider.doSync().

Member Data Documentation
◆ linkConfigurations
|
private |
The link configurations.
Definition at line 34 of file LinkFactory.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkConfigurations().
◆ links
|
private |
The links.
Definition at line 31 of file LinkFactory.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.addLink(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.addLinkListener(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.deleteLink(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLowerLimits(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getUpperLimits(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.refreshHardwareLayer(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.removeLinkListener(), and com.neuronrobotics.sdk.addons.kinematics.LinkFactory.setCachedTargets().
◆ userLinkProviders
|
staticprivate |
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/LinkFactory.java