Protected Member Functions | |
| void | getVitamins (Element doc) |
Private Member Functions | |
| String[] | getCoreShaftPart () |
| String[] | getCoreEmPart () |
Private Attributes | |
| ArrayList< ILinkConfigurationChangeListener > | listeners = null |
| boolean | pauseEvents =false |
| String | name = "newLink" |
| String | type = "virtual" |
| int | index = 0 |
| int | totlaNumberOfLinks = 1 |
| int | linkIndex = 0 |
| double | scale = 1.0 |
| double | upperLimit = 100000 |
| double | lowerLimit = -100000 |
| double | k [] = new double[] { 1, 0, 0 } |
| boolean | inverted = false |
| boolean | isLatch = false |
| double | indexLatch = 0 |
| boolean | isStopOnLatch = false |
| int | homingTicksPerSecond = 10000000 |
| double | velocityLimit = 100000000 |
| String | deviceScriptingName = "exampleDevice" |
| double | deviceTheoreticalMax = 180 |
| double | deviceTheoreticalMin = 0 |
| double | mass = 0.01 |
| TransformNR | centerOfMassFromCentroid = new TransformNR() |
| TransformNR | imuFromCentroid = new TransformNR() |
| double | staticOffset = 0 |
| ArrayList< LinkConfiguration > | slaveLinks = new ArrayList<LinkConfiguration>() |
| boolean | invertVelocity = false |
| boolean | invertLimitVelocityPolarity = false |
| HashMap< String, String[]> | vitamins = new HashMap<String, String[]>() |
| HashMap< String, String > | vitaminVariant = new HashMap<String, String>() |
| boolean | passive = false |
| boolean | newAbs = false |
Detailed Description
The Class LinkConfiguration.
Definition at line 25 of file LinkConfiguration.java.
Constructor & Destructor Documentation
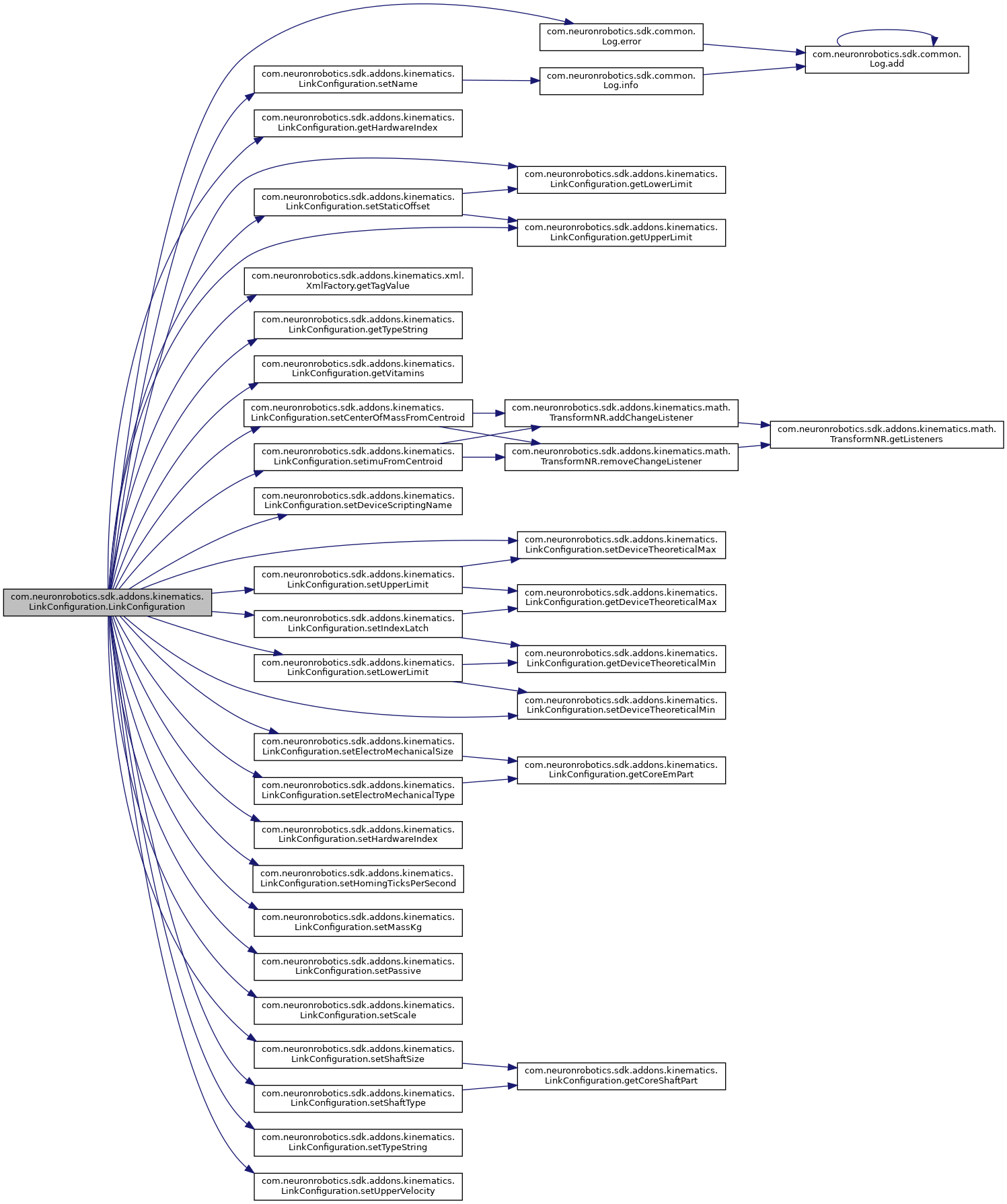
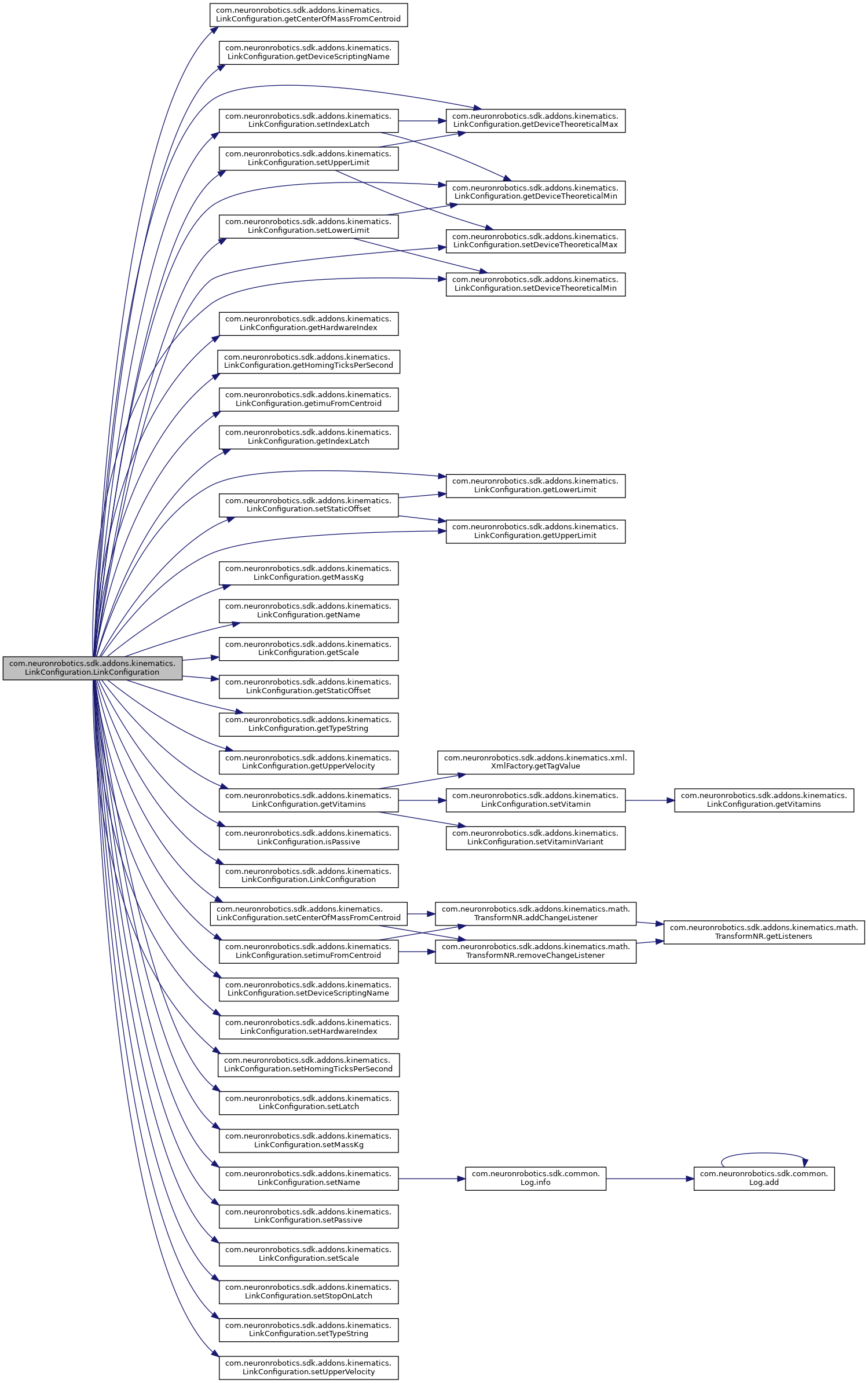
◆ LinkConfiguration() [1/5]
| com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration | ( | Element | eElement | ) |
Instantiates a new link configuration.
- Parameters
-
eElement the e element
Definition at line 109 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.common.Log.error(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.xml.XmlFactory.getTagValue(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTypeString(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getVitamins(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.inverted, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.invertLimitVelocityPolarity, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isLatch, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isStopOnLatch, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.k, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.newAbs, com.neuronrobotics.sdk.addons.kinematics.LinkType.PID, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setCenterOfMassFromCentroid(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceScriptingName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMax(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMin(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setElectroMechanicalSize(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setElectroMechanicalType(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setHardwareIndex(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setHomingTicksPerSecond(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setimuFromCentroid(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setIndexLatch(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setMassKg(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPassive(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setScale(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setShaftSize(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setShaftType(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setStaticOffset(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setTypeString(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperVelocity(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.staticOffset, and com.neuronrobotics.sdk.addons.kinematics.LinkType.VIRTUAL.
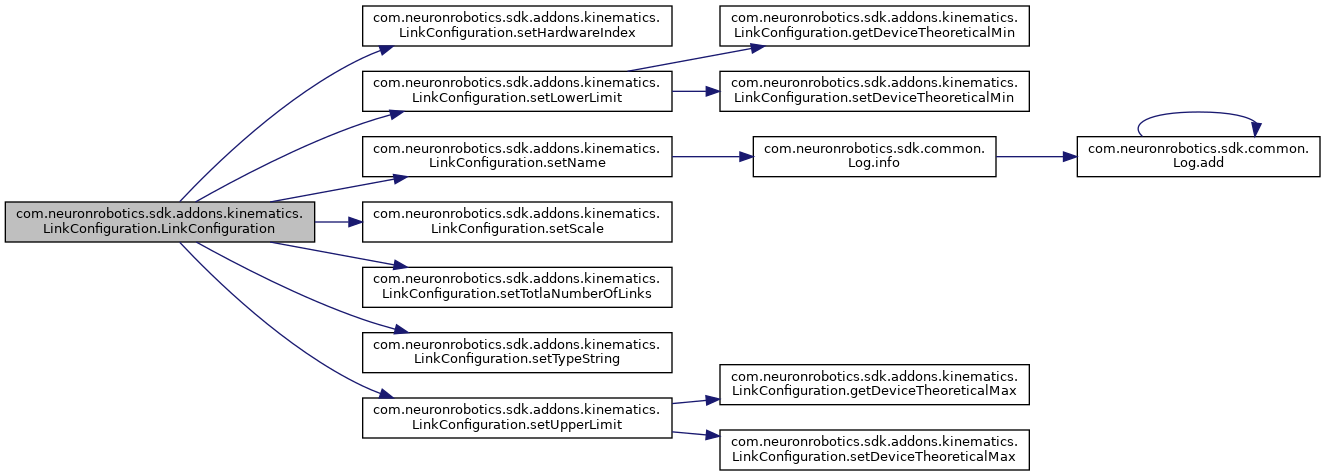
◆ LinkConfiguration() [2/5]
| com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration | ( | Object[] | args | ) |
Instantiates a new link configuration.
- Parameters
-
args the args
Definition at line 258 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkType.PID, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setHardwareIndex(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setScale(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setTotlaNumberOfLinks(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setTypeString(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperLimit().
◆ LinkConfiguration() [3/5]
| com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration | ( | ) |
Instantiates a new link configuration.
Definition at line 339 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ LinkConfiguration() [4/5]
| com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration | ( | LinkConfiguration | from | ) |
Definition at line 343 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCenterOfMassFromCentroid(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceScriptingName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMax(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMin(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHomingTicksPerSecond(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getimuFromCentroid(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getIndexLatch(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getMassKg(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getScale(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getStaticOffset(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTypeString(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperVelocity(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getVitamins(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isLatch, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isPassive(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isStopOnLatch, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setCenterOfMassFromCentroid(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceScriptingName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMax(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMin(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setHardwareIndex(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setHomingTicksPerSecond(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setimuFromCentroid(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setIndexLatch(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLatch(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setMassKg(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPassive(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setScale(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setStaticOffset(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setStopOnLatch(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setTypeString(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperVelocity(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.slaveLinks.
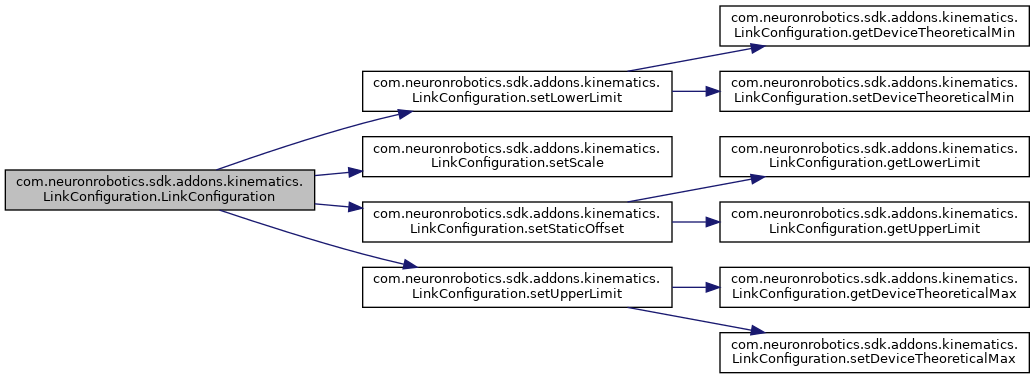
◆ LinkConfiguration() [5/5]
| com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration | ( | int | home, |
| int | llimit, | ||
| int | ulimit, | ||
| double | d | ||
| ) |
Instantiates a new link configuration.
- Parameters
-
home the home llimit the llimit ulimit the ulimit d the d
Definition at line 383 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setScale(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setStaticOffset(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperLimit().
Member Function Documentation
◆ addChangeListener()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.addChangeListener | ( | ILinkConfigurationChangeListener | l | ) |
Definition at line 1094 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getListeners().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.addChangeListener().

◆ clearChangeListener()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.clearChangeListener | ( | ) |
Definition at line 1104 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getListeners(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.listeners.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.clearChangeListener().

◆ event()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.event | ( | TransformNR | changed | ) |
Implements com.neuronrobotics.sdk.addons.kinematics.math.ITransformNRChangeListener.
Definition at line 1130 of file LinkConfiguration.java.
◆ getCenterOfMassFromCentroid()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCenterOfMassFromCentroid | ( | ) |
Definition at line 925 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.centerOfMassFromCentroid.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ getCoreEmPart()
|
private |
Definition at line 960 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.vitamins.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getElectroMechanicalSize(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getElectroMechanicalType(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setElectroMechanicalSize(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setElectroMechanicalType().
◆ getCoreShaftPart()
|
private |
Definition at line 953 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.vitamins.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getShaftSize(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getShaftType(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setShaftSize(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setShaftType().
◆ getDeviceScriptingName()
| String com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceScriptingName | ( | ) |
Gets the device scripting name.
- Returns
- the device scripting name
Definition at line 861 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.deviceScriptingName.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getDyio(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getGCODE(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getPid(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.toString().
◆ getDeviceTheoreticalMax()
| double com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMax | ( | ) |
Definition at line 513 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.deviceTheoreticalMax.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMaximumValue(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setIndexLatch(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperLimit().
◆ getDeviceTheoreticalMin()
| double com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMin | ( | ) |
Definition at line 522 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.deviceTheoreticalMin.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMinimumValue(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setIndexLatch(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLowerLimit().
◆ getElectroMechanicalSize()
| String com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getElectroMechanicalSize | ( | ) |
Definition at line 976 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCoreEmPart().

◆ getElectroMechanicalType()
| String com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getElectroMechanicalType | ( | ) |
Definition at line 967 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCoreEmPart().

◆ getHardwareIndex()
| int com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex | ( | ) |
gets the hardware index for maping this kinematics link to its assocaited hardware index.
- Returns
- the hardware index
Definition at line 490 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.index.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getHeater(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getLink(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getPidConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.homeLink(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.onLinkLimit(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDevice(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPidConfiguration(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.toString().
◆ getHomingTicksPerSecond()
| int com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHomingTicksPerSecond | ( | ) |
Gets the homing ticks per second.
- Returns
- the homing ticks per second
Definition at line 736 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.homingTicksPerSecond.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.toString().
◆ getimuFromCentroid()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getimuFromCentroid | ( | ) |
Definition at line 937 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.imuFromCentroid.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ getIndexLatch()
| double com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getIndexLatch | ( | ) |
Gets the index latch.
- Returns
- the index latch
Definition at line 680 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.indexLatch.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getPidConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.homeLink(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDevice().
◆ getKD()
| double com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getKD | ( | ) |
Gets the kd.
- Returns
- the kd
Definition at line 607 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.k.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getPidConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDevice().
◆ getKI()
| double com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getKI | ( | ) |
Gets the ki.
- Returns
- the ki
Definition at line 598 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.k.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getPidConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDevice().
◆ getKP()
| double com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getKP | ( | ) |
Gets the kp.
- Returns
- the kp
Definition at line 589 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.k.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getPidConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDevice().
◆ getLinkIndex()
| int com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLinkIndex | ( | ) |
THis is the index of this link in its kinematics chain.
- Returns
- the link index
Definition at line 782 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.linkIndex.
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager._generateStls().
◆ getListeners()
| ArrayList<ILinkConfigurationChangeListener> com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getListeners | ( | ) |
Definition at line 1109 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.listeners.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.addChangeListener(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.clearChangeListener(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.removeChangeListener().
◆ getLowerLimit()
| double com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLowerLimit | ( | ) |
Gets the lower limit.
- Returns
- the lower limit
Definition at line 580 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.lowerLimit.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.homeLink(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDesiredJointAxisValue(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setStaticOffset(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.toString().
◆ getLowerVelocity()
| double com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLowerVelocity | ( | ) |
Gets the lower velocity.
- Returns
- the lower velocity
Definition at line 773 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.velocityLimit.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml().
◆ getMassKg()
| double com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getMassKg | ( | ) |
Definition at line 916 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.mass.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), and com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().
◆ getName()
| String com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getName | ( | ) |
Gets the name.
- Returns
- the name
Definition at line 469 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.name.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.AbstractLink(), com.neuronrobotics.bowlerstudio.scripting.RobotHelper.getDefaultContents(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.toString().
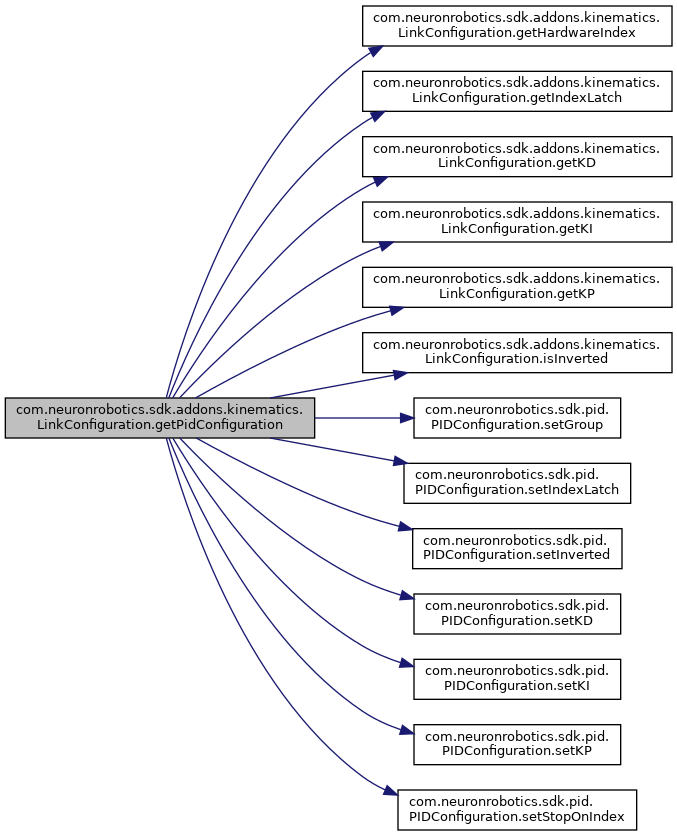
◆ getPidConfiguration()
| PIDConfiguration com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getPidConfiguration | ( | ) |
Gets the pid configuration.
- Returns
- the pid configuration
Definition at line 820 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getIndexLatch(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getKD(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getKI(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getKP(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isInverted(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isStopOnLatch, com.neuronrobotics.sdk.pid.PIDConfiguration.setGroup(), com.neuronrobotics.sdk.pid.PIDConfiguration.setIndexLatch(), com.neuronrobotics.sdk.pid.PIDConfiguration.setInverted(), com.neuronrobotics.sdk.pid.PIDConfiguration.setKD(), com.neuronrobotics.sdk.pid.PIDConfiguration.setKI(), com.neuronrobotics.sdk.pid.PIDConfiguration.setKP(), and com.neuronrobotics.sdk.pid.PIDConfiguration.setStopOnIndex().
◆ getScale()
| double com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getScale | ( | ) |
Gets the scale.
- Returns
- the scale
Definition at line 509 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.scale.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getDeviceMinEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMinEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getScale(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.JointLimit.JointLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMinEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.toString().
◆ getShaftSize()
| String com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getShaftSize | ( | ) |
Definition at line 994 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCoreShaftPart().

◆ getShaftType()
| String com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getShaftType | ( | ) |
Definition at line 985 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCoreShaftPart().

◆ getSlaveLinks()
| ArrayList<LinkConfiguration> com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getSlaveLinks | ( | ) |
Definition at line 907 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.slaveLinks.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.AbstractLink(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.loadConfig().
◆ getStaticOffset()
| double com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getStaticOffset | ( | ) |
Gets the static offset.
- Returns
- the static offset
Definition at line 880 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.staticOffset.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getHome(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ getTotlaNumberOfLinks()
| int com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTotlaNumberOfLinks | ( | ) |
Gets the totla number of links.
- Returns
- the totla number of links
Definition at line 801 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.totlaNumberOfLinks.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.LinkFactory().
◆ getTypeString()
| String com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTypeString | ( | ) |
Definition at line 1021 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.type.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getLink(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isPrismatic(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isTool(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isVirtual(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.toString().
◆ getUpperLimit()
| double com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperLimit | ( | ) |
Gets the upper limit.
- Returns
- the upper limit
Definition at line 553 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.upperLimit.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getUpperLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.homeLink(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDesiredJointAxisValue(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setStaticOffset(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.toString().
◆ getUpperVelocity()
| double com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperVelocity | ( | ) |
Gets the upper velocity.
- Returns
- the upper velocity
Definition at line 764 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.velocityLimit.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxVelocityEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ getVitamins() [1/2]
| HashMap<String, String[]> com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getVitamins | ( | ) |
Definition at line 1012 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.vitamins.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setVitamin().
◆ getVitamins() [2/2]
|
protected |
Gets the vitamins.
- Parameters
-
doc the doc
Definition at line 275 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.xml.XmlFactory.getTagValue(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setVitamin(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setVitaminVariant().
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().

◆ getVitaminVariant()
| String com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getVitaminVariant | ( | String | name | ) |
Get a purchaing code for a vitamin
- Parameters
-
name name of vitamin
- Returns
Definition at line 332 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.name, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.vitaminVariant.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml().
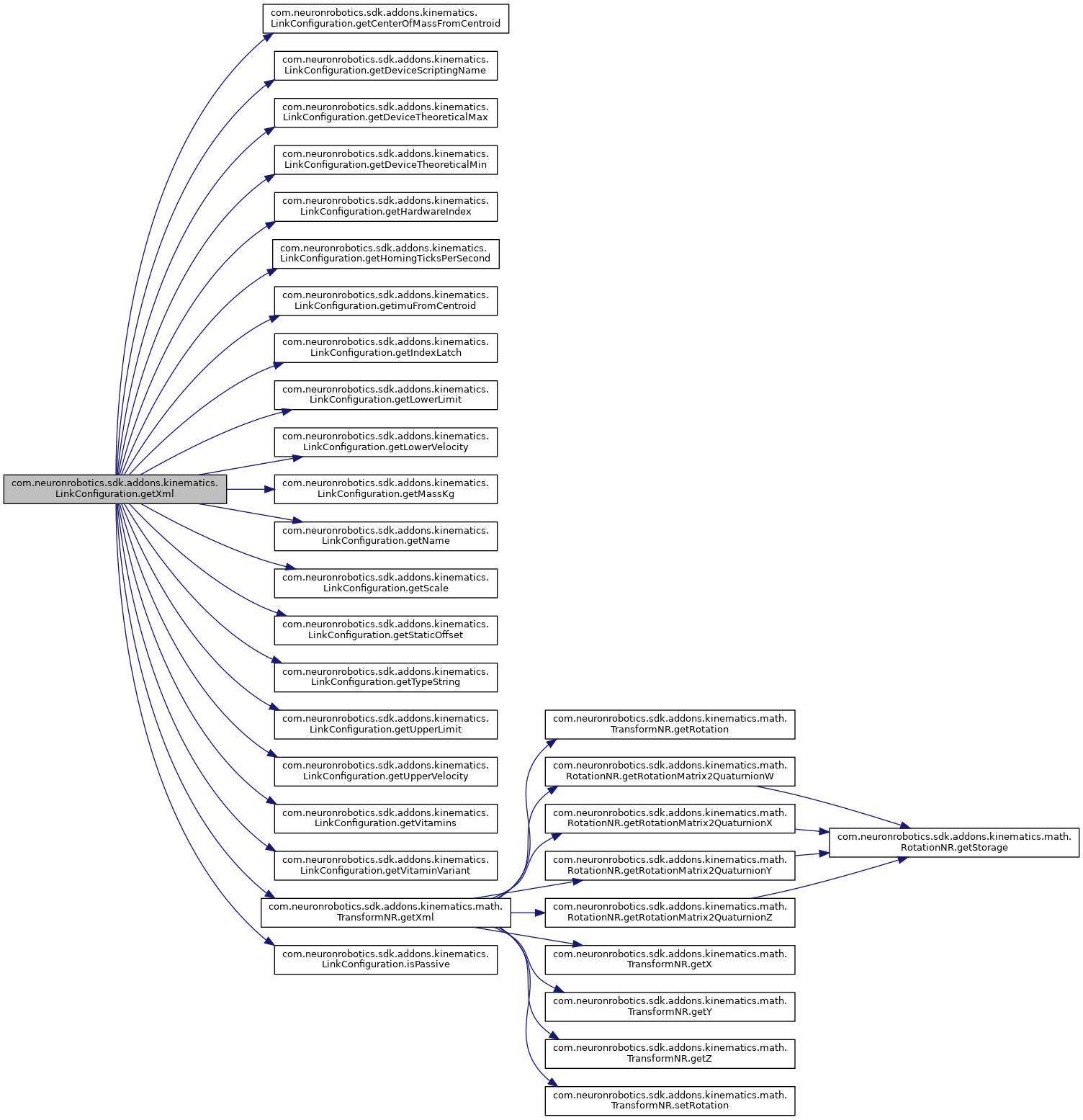
◆ getXml()
| String com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml | ( | ) |
Gets the xml.
- Returns
- the xml
Definition at line 418 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.deviceScriptingName, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCenterOfMassFromCentroid(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceScriptingName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMax(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMin(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHomingTicksPerSecond(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getimuFromCentroid(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getIndexLatch(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLowerVelocity(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getMassKg(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getScale(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getStaticOffset(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTypeString(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperVelocity(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getVitamins(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getVitaminVariant(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isLatch, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isPassive(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isStopOnLatch, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.slaveLinks.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getEmbedableXml().
◆ isInverted()
| boolean com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isInverted | ( | ) |
Checks if is inverted.
- Returns
- true, if is inverted
Definition at line 656 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.inverted.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getPidConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDevice().
◆ isInvertLimitVelocityPolarity()
| boolean com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isInvertLimitVelocityPolarity | ( | ) |
Definition at line 898 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.invertLimitVelocityPolarity.
◆ isLatch()
| boolean com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isLatch | ( | ) |
Checks if is latch.
- Returns
- true, if is latch
Definition at line 698 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isLatch.
◆ isPassive()
| boolean com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isPassive | ( | ) |
Definition at line 1003 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.passive.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), and com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().
◆ isPauseEvents()
| boolean com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isPauseEvents | ( | ) |
Definition at line 1134 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.pauseEvents.
◆ isPrismatic()
| boolean com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isPrismatic | ( | ) |
Checks if is prismatic.
- Returns
- true, if is prismatic
Definition at line 1078 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTypeString().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink(), com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematicsMatrix(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal(), and com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().

◆ isStopOnLatch()
| boolean com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isStopOnLatch | ( | ) |
Checks if is stop on latch.
- Returns
- true, if is stop on latch
Definition at line 717 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isStopOnLatch.
◆ isTool()
| boolean com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isTool | ( | ) |
Checks if is tool.
- Returns
- true, if is tool
Definition at line 1057 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTypeString().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink().

◆ isVirtual()
| boolean com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isVirtual | ( | ) |
Checks if is virtual.
- Returns
- true, if is virtual
Definition at line 1037 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTypeString().

◆ removeChangeListener()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.removeChangeListener | ( | ILinkConfigurationChangeListener | l | ) |
Definition at line 1099 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getListeners().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractLink.removeChangeListener().

◆ setCenterOfMassFromCentroid()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setCenterOfMassFromCentroid | ( | TransformNR | com | ) |
Definition at line 929 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.addChangeListener(), and com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.removeChangeListener().
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().

◆ setDeviceScriptingName()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceScriptingName | ( | String | deviceScriptingName | ) |
Sets the device scripting name.
- Parameters
-
deviceScriptingName the new device scripting name
Definition at line 870 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.deviceScriptingName.
Referenced by com.neuronrobotics.bowlerstudio.scripting.RobotHelper.getDefaultContents(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ setDeviceTheoreticalMax()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMax | ( | double | deviceTheoreticalMax | ) |
Definition at line 517 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.deviceTheoreticalMax.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getLink(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.MockRotoryLink(), com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.PidPrismaticLink(), com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.PidRotoryLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setDeviceMaximumValue(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperLimit().
◆ setDeviceTheoreticalMin()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMin | ( | double | deviceTheoreticalMin | ) |
Definition at line 526 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.deviceTheoreticalMin.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getLink(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.MockRotoryLink(), com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.PidPrismaticLink(), com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.PidRotoryLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setDeviceMinimumValue(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLowerLimit().
◆ setElectroMechanicalSize()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setElectroMechanicalSize | ( | String | electroMechanicalSize | ) |
Definition at line 980 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCoreEmPart().
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().

◆ setElectroMechanicalType()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setElectroMechanicalType | ( | String | electroMechanicalType | ) |
Definition at line 971 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCoreEmPart().
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().

◆ setHardwareIndex()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setHardwareIndex | ( | int | index | ) |
sets the hardware index for maping this kinematics link to its assocaited hardware index.
- Parameters
-
index the new hardware index
Definition at line 479 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.index.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ setHomingTicksPerSecond()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setHomingTicksPerSecond | ( | int | homingTicksPerSecond | ) |
Sets the homing ticks per second.
- Parameters
-
homingTicksPerSecond the new homing ticks per second
Definition at line 726 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.homingTicksPerSecond.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPidConfiguration().
◆ setimuFromCentroid()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setimuFromCentroid | ( | TransformNR | imu | ) |
Definition at line 941 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.addChangeListener(), and com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.removeChangeListener().
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().

◆ setIndexLatch()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setIndexLatch | ( | double | indexLatch | ) |
Sets the index latch.
- Parameters
-
indexLatch the new index latch
Definition at line 665 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMax(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMin(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.indexLatch.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().

◆ setInverted()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setInverted | ( | boolean | inverted | ) |
Sets the inverted.
- Parameters
-
inverted the new inverted
Definition at line 646 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.inverted.
◆ setInvertLimitVelocityPolarity()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setInvertLimitVelocityPolarity | ( | boolean | invertVelocity | ) |
Definition at line 902 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.invertVelocity.
◆ setKD()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setKD | ( | double | kD | ) |
Sets the kd.
- Parameters
-
kD the new kd
Definition at line 636 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.k.
◆ setKI()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setKI | ( | double | kI | ) |
Sets the ki.
- Parameters
-
kI the new ki
Definition at line 626 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.k.
◆ setKP()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setKP | ( | double | kP | ) |
Sets the kp.
- Parameters
-
kP the new kp
Definition at line 616 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.k.
◆ setLatch()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLatch | ( | boolean | isLatch | ) |
Sets the latch.
- Parameters
-
isLatch the new latch
Definition at line 689 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isLatch.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ setLinkIndex()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLinkIndex | ( | int | linkIndex | ) |
This sets the index of the link in itts kinematic chain.
- Parameters
-
linkIndex the new link index
Definition at line 791 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.linkIndex.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDevice().
◆ setLowerLimit()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLowerLimit | ( | double | lowerLimit | ) |
Sets the lower limit.
- Parameters
-
lowerLimit the new lower limit
Definition at line 562 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMin(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.lowerLimit, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.newAbs, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMin().
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentAsLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMaxEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMinEngineeringUnits().

◆ setMassKg()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setMassKg | ( | double | mass | ) |
Definition at line 920 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.mass.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ setName()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setName | ( | String | name | ) |
Sets the name.
- Parameters
-
name the new name
Definition at line 458 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.common.Log.info(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.name.
Referenced by com.neuronrobotics.bowlerstudio.scripting.RobotHelper.getDefaultContents(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().

◆ setPassive()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPassive | ( | boolean | passive | ) |
Definition at line 1007 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.passive.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ setPauseEvents()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPauseEvents | ( | boolean | pauseEvents | ) |
Definition at line 1138 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.pauseEvents.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.MockRotoryLink(), com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.PidPrismaticLink(), and com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.PidRotoryLink().
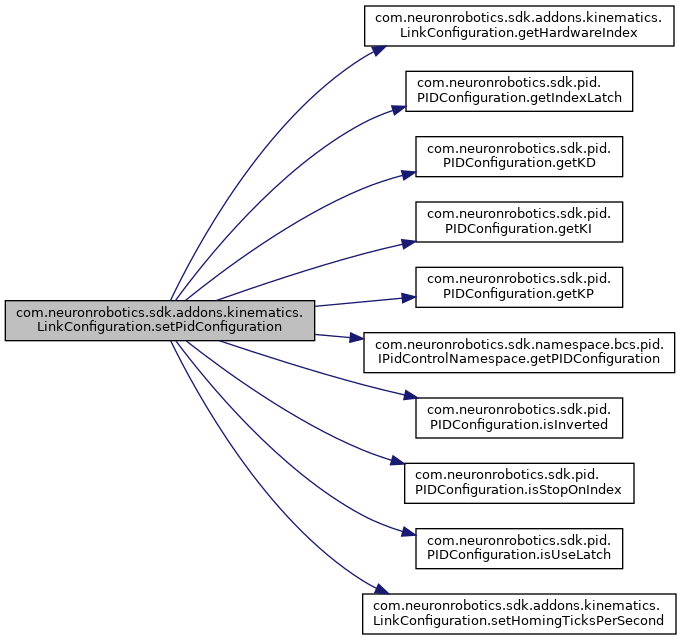
◆ setPidConfiguration()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPidConfiguration | ( | IPidControlNamespace | pid | ) |
Sets the pid configuration.
- Parameters
-
pid the new pid configuration
Definition at line 837 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), com.neuronrobotics.sdk.pid.PIDConfiguration.getIndexLatch(), com.neuronrobotics.sdk.pid.PIDConfiguration.getKD(), com.neuronrobotics.sdk.pid.PIDConfiguration.getKI(), com.neuronrobotics.sdk.pid.PIDConfiguration.getKP(), com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.getPIDConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.indexLatch, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.inverted, com.neuronrobotics.sdk.pid.PIDConfiguration.isInverted(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isLatch, com.neuronrobotics.sdk.pid.PIDConfiguration.isStopOnIndex(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isStopOnLatch, com.neuronrobotics.sdk.pid.PIDConfiguration.isUseLatch(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.k, com.neuronrobotics.sdk.addons.kinematics.LinkType.PID, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setHomingTicksPerSecond().
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.LinkFactory().
◆ setScale()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setScale | ( | double | scale | ) |
Sets the scale.
- Parameters
-
scale the new scale
Definition at line 499 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.scale.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setScale().
◆ setShaftSize()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setShaftSize | ( | String | shaftSize | ) |
Definition at line 998 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCoreShaftPart().
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().

◆ setShaftType()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setShaftType | ( | String | shaftType | ) |
Definition at line 989 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCoreShaftPart().
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().

◆ setSlaveLinks()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setSlaveLinks | ( | ArrayList< LinkConfiguration > | slaveLinks | ) |
Definition at line 911 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.slaveLinks.
◆ setStaticOffset()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setStaticOffset | ( | double | staticOffset | ) |
Sets the static offset.
- Parameters
-
staticOffset the new static offset
Definition at line 889 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperLimit(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.staticOffset.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setHome().

◆ setStopOnLatch()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setStopOnLatch | ( | boolean | isStopOnLatch | ) |
Sets the stop on latch.
- Parameters
-
isStopOnLatch the new stop on latch
Definition at line 707 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isStopOnLatch.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ setTotlaNumberOfLinks()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setTotlaNumberOfLinks | ( | int | totlaNumberOfLinks | ) |
Sets the totla number of links.
- Parameters
-
totlaNumberOfLinks the new totla number of links
Definition at line 810 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.totlaNumberOfLinks.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ setTypeString()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setTypeString | ( | String | typeString | ) |
Definition at line 1025 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.type.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ setUpperLimit()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperLimit | ( | double | upperLimit | ) |
Sets the upper limit.
- Parameters
-
upperLimit the new upper limit
Definition at line 536 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMax(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.newAbs, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMax(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.upperLimit.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentAsUpperLimit(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMinEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setUpperLimit().

◆ setUpperVelocity()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperVelocity | ( | double | upperVelocity | ) |
Sets the upper velocity.
- Parameters
-
upperVelocity the new upper velocity
Definition at line 754 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setMaxVelocityEngineeringUnits().
◆ setVitamin()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setVitamin | ( | String | name, |
| String | type, | ||
| String | id | ||
| ) |
Add a vitamin to this link
- Parameters
-
name the name of this vitamin, if the name already exists, the data will be overwritten. type the vitamin type, this maps the the json filename id the part ID, theis maps to the key in the json for the vitamin
Definition at line 306 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getVitamins(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.name, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.type.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getVitamins().

◆ setVitamins()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setVitamins | ( | HashMap< String, String[]> | vitamins | ) |
Definition at line 1016 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.vitamins.
◆ setVitaminVariant()
| void com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setVitaminVariant | ( | String | name, |
| String | tagValue2 | ||
| ) |
Set a purchasing code for a vitamin
- Parameters
-
name name of vitamin tagValue2 Purchaning code
Definition at line 321 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.name, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.vitaminVariant.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getVitamins().
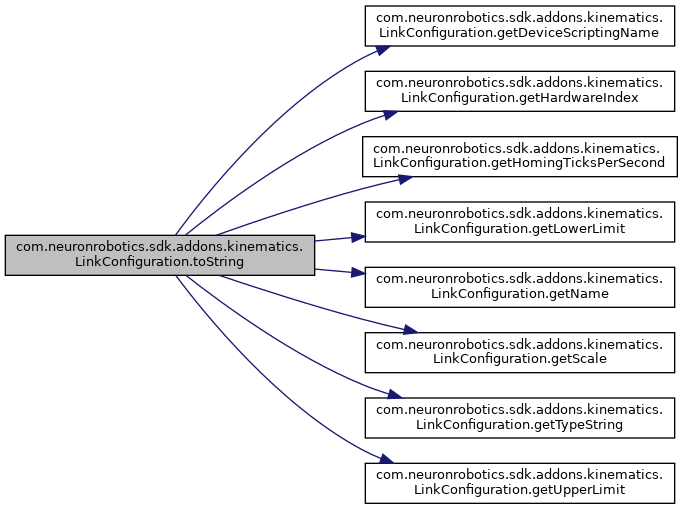
◆ toString()
| String com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.toString | ( | ) |
Definition at line 396 of file LinkConfiguration.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.deviceScriptingName, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceScriptingName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHomingTicksPerSecond(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getScale(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTypeString(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperLimit().
Member Data Documentation
◆ centerOfMassFromCentroid
|
private |
Definition at line 80 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCenterOfMassFromCentroid().
◆ deviceScriptingName
|
private |
The device scripting name.
Definition at line 76 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceScriptingName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceScriptingName(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.toString().
◆ deviceTheoreticalMax
|
private |
Definition at line 77 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMax(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMax().
◆ deviceTheoreticalMin
|
private |
Definition at line 78 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getDeviceTheoreticalMin(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMin().
◆ homingTicksPerSecond
|
private |
The homing ticks per second.
Definition at line 70 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHomingTicksPerSecond(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setHomingTicksPerSecond().
◆ imuFromCentroid
|
private |
Definition at line 81 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getimuFromCentroid().
◆ index
|
private |
The index.
Definition at line 35 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setHardwareIndex().
◆ indexLatch
|
private |
The index latch.
Definition at line 64 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getIndexLatch(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setIndexLatch(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPidConfiguration().
◆ inverted
|
private |
The inverted.
Definition at line 58 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isInverted(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setInverted(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPidConfiguration().
◆ invertLimitVelocityPolarity
|
private |
This is the flag for setting the direction of the velocity lock out for limit switches
Definition at line 97 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isInvertLimitVelocityPolarity(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration().
◆ invertVelocity
|
private |
This is the flag for setting the direction of the velocity lock out for limit switches
Definition at line 91 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setInvertLimitVelocityPolarity().
◆ isLatch
|
private |
The is latch.
Definition at line 61 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isLatch(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLatch(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPidConfiguration().
◆ isStopOnLatch
|
private |
The is stop on latch.
Definition at line 67 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getPidConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isStopOnLatch(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPidConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setStopOnLatch().
◆ k
|
private |
The k.
Definition at line 55 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getKD(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getKI(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getKP(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setKD(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setKI(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setKP(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPidConfiguration().
◆ linkIndex
|
private |
The link index.
Definition at line 41 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLinkIndex(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLinkIndex().
◆ listeners
|
private |
Definition at line 26 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.clearChangeListener(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getListeners().
◆ lowerLimit
|
private |
The lower limit.
Definition at line 52 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLowerLimit(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLowerLimit().
◆ mass
|
private |
Definition at line 79 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getMassKg(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setMassKg().
◆ name
|
private |
The name.
Definition at line 29 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getVitaminVariant(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setName(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setVitamin(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setVitaminVariant().
◆ newAbs
|
private |
Definition at line 102 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLowerLimit(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperLimit().
◆ passive
|
private |
Definition at line 101 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isPassive(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPassive().
◆ pauseEvents
|
private |
Definition at line 27 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isPauseEvents(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPauseEvents().
◆ scale
|
private |
The scale.
Definition at line 46 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getScale(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setScale().
◆ slaveLinks
|
private |
Definition at line 85 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getSlaveLinks(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getXml(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setSlaveLinks().
◆ staticOffset
|
private |
The static offset.
Definition at line 83 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getStaticOffset(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setStaticOffset().
◆ totlaNumberOfLinks
|
private |
The totla number of links.
Definition at line 38 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTotlaNumberOfLinks(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setTotlaNumberOfLinks().
◆ type
|
private |
The type.
Definition at line 32 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTypeString(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setTypeString(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setVitamin().
◆ upperLimit
|
private |
The upper limit.
Definition at line 49 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperLimit(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setUpperLimit().
◆ velocityLimit
|
private |
The upper velocity.
Definition at line 73 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLowerVelocity(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperVelocity().
◆ vitamins
|
private |
Definition at line 99 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCoreEmPart(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getCoreShaftPart(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getVitamins(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setVitamins().
◆ vitaminVariant
|
private |
Definition at line 100 of file LinkConfiguration.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getVitaminVariant(), and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setVitaminVariant().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/LinkConfiguration.java