
Static Public Member Functions | |
| static boolean | checkTaskSpaceTransform (AbstractKinematicsNR dev, TransformNR taskSpaceTransform, double seconds) |
| static boolean | checkTaskSpaceTransform (AbstractKinematicsNR dev, TransformNR taskSpaceTransform) |
Protected Member Functions | |
| ArrayList< LinkConfiguration > | loadConfig (Element doc) |
| LinkFactory | getDevice () |
| void | setDevice (LinkFactory f, ArrayList< LinkConfiguration > linkConfigs) |
| void | firePoseTransform (TransformNR transform) |
| void | fireTargetJointsUpdate (double[] jointSpaceVector, TransformNR fwd) |
| String | getCode (Element e, String tag) |
| String[] | getGitCodes (Element doc, String tag) |
 Protected Member Functions inherited from com.neuronrobotics.sdk.common.BowlerAbstractDevice Protected Member Functions inherited from com.neuronrobotics.sdk.common.BowlerAbstractDevice | |
| void | fireDisconnectEvent () |
| void | fireConnectEvent () |
Protected Attributes | |
| ArrayList< IJointSpaceUpdateListenerNR > | jointSpaceUpdateListeners = new ArrayList<IJointSpaceUpdateListenerNR>() |
Private Member Functions | |
| String | getDate () |
| double[] | _setDesiredJointSpaceVector (double[] jointSpaceVect, double seconds, boolean fireTaskUpdate) throws Exception |
| void | fireJointSpaceLimitUpdate (int axis, JointLimit event) |
| void | runHome (PIDChannel joint, int tps) |
Static Private Member Functions | |
| static boolean | checkVector (AbstractKinematicsNR dev, double[] jointSpaceVect, double seconds) |
Private Attributes | |
| ArrayList< PIDConfiguration > | pidConfigurations = new ArrayList<PIDConfiguration>() |
| ArrayList< ITaskSpaceUpdateListenerNR > | taskSpaceUpdateListeners = new ArrayList<ITaskSpaceUpdateListenerNR>() |
| ArrayList< IRegistrationListenerNR > | regListeners = new ArrayList<IRegistrationListenerNR>() |
| ArrayList< MobileBase > | mobileBases = new ArrayList<MobileBase>() |
| String[] | dhEngine |
| String[] | cadEngine |
| TransformNR | currentPoseTarget = new TransformNR() |
| TransformNR | base2Fiducial = new TransformNR() |
| TransformNR | fiducial2RAS = new TransformNR() |
| boolean | noFlush = false |
| boolean | noXmlConfig = true |
| DHChain | dhParametersChain = null |
| Object | root |
| LinkFactory | factory = null |
| int | retryNumberBeforeFail = 5 |
| IMU | imu = new IMU() |
| Runnable | renderWrangler =null |
| long | homeTime |
Detailed Description
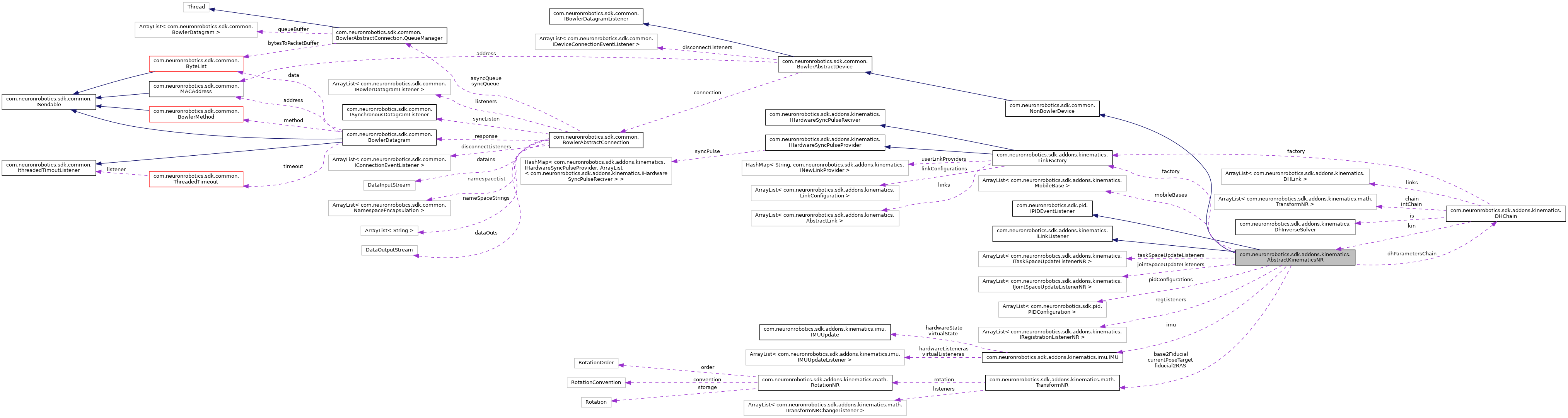
The Class AbstractKinematicsNR.
Definition at line 47 of file AbstractKinematicsNR.java.
Constructor & Destructor Documentation
◆ AbstractKinematicsNR() [1/3]
| com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.AbstractKinematicsNR | ( | ) |
Instantiates a new abstract kinematics nr.
Definition at line 188 of file AbstractKinematicsNR.java.
◆ AbstractKinematicsNR() [2/3]
| com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.AbstractKinematicsNR | ( | InputStream | configFile, |
| LinkFactory | f | ||
| ) |
Instantiates a new abstract kinematics nr.
- Parameters
-
configFile the config file f the f
Definition at line 207 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.xml.XmlFactory.getAllNodesDocument(), and com.neuronrobotics.sdk.common.Log.info().

◆ AbstractKinematicsNR() [3/3]
| com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.AbstractKinematicsNR | ( | Element | doc, |
| LinkFactory | f | ||
| ) |
Instantiates a new abstract kinematics nr.
- Parameters
-
doc the doc f the f
Definition at line 234 of file AbstractKinematicsNR.java.
Member Function Documentation
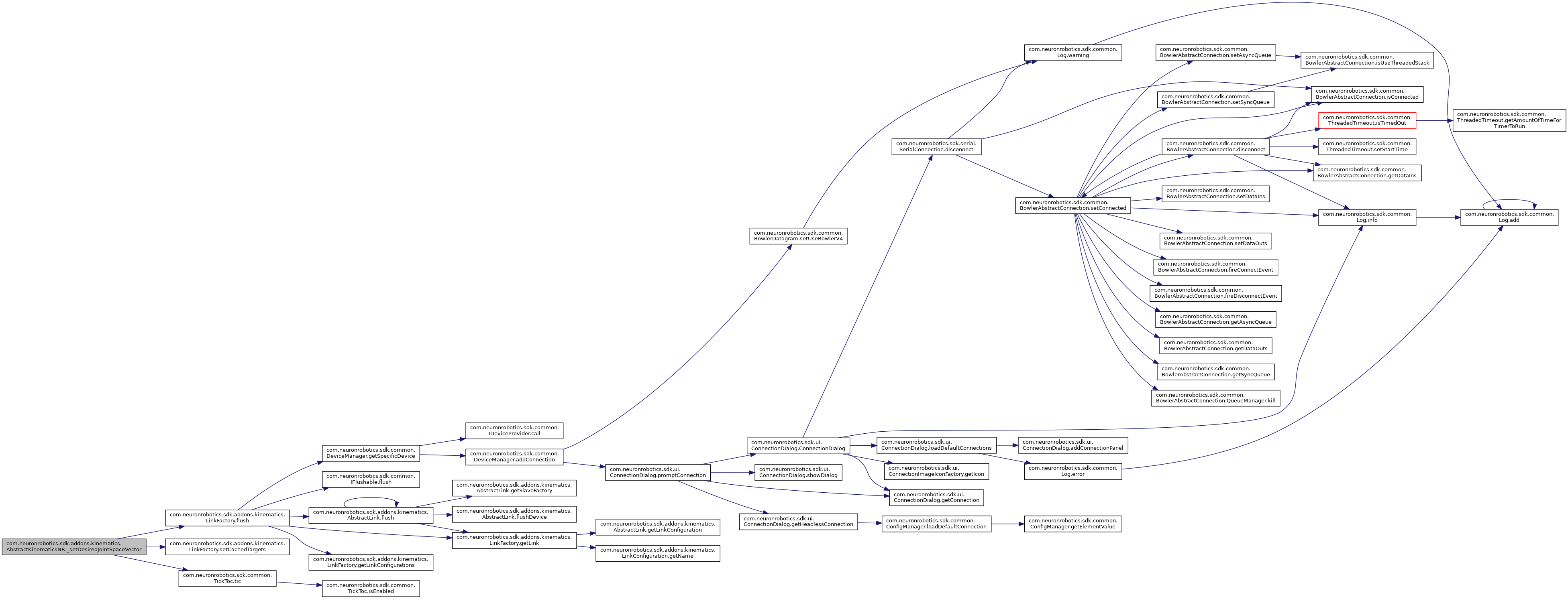
◆ _setDesiredJointSpaceVector()
|
private |
This calculates the target pose .
- Parameters
-
jointSpaceVect the joint space vect seconds the time for the transition to take from current position to target, unit seconds
- Returns
- The joint space vector is returned for target arrival referance
- Exceptions
-
Exception If there is a workspace error
Definition at line 733 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.flush(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.setCachedTargets(), and com.neuronrobotics.sdk.common.TickToc.tic().
◆ addChangeListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.addChangeListener | ( | int | linkIndex, |
| ILinkConfigurationChangeListener | l | ||
| ) |
Definition at line 1630 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.addListeners().
◆ addJointSpaceListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.addJointSpaceListener | ( | IJointSpaceUpdateListenerNR | l | ) |
Adds the joint space listener.
- Parameters
-
l the l
Definition at line 1015 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.addListeners(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain().
◆ addPoseUpdateListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.addPoseUpdateListener | ( | ITaskSpaceUpdateListenerNR | l | ) |
Adds the pose update listener.
- Parameters
-
l the l
Definition at line 1058 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain().
◆ addRegistrationListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.addRegistrationListener | ( | IRegistrationListenerNR | l | ) |
Adds the registration listener.
- Parameters
-
l the l
Definition at line 1036 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.IRegistrationListenerNR.onBaseToFiducialUpdate().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.connect(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.run().

◆ asyncInterpolatedMove()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.asyncInterpolatedMove | ( | TransformNR | target, |
| double | seconds, | ||
| InterpolationType | type, | ||
| IOnInterpolationDone | listener, | ||
| double ... | conf | ||
| ) |
Definition at line 1665 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.IOnInterpolationDone.done(), and com.neuronrobotics.sdk.addons.kinematics.InterpolationMoveState.FAULT.
Referenced by com.neuronrobotics.bowlerstudio.sequence.SequenceEvent.execute().

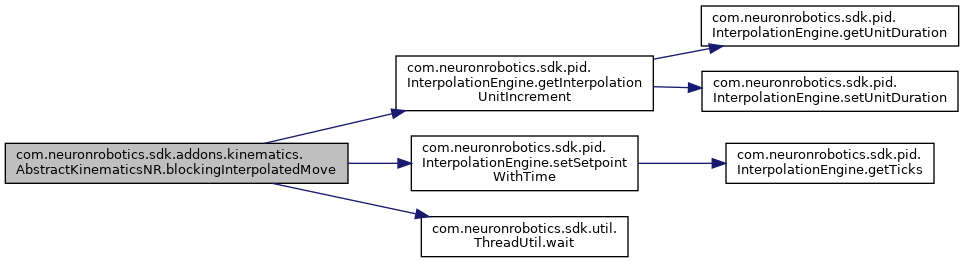
◆ blockingInterpolatedMove()
| InterpolationMoveState com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.blockingInterpolatedMove | ( | TransformNR | target, |
| double | seconds, | ||
| InterpolationType | type, | ||
| double ... | conf | ||
| ) |
Definition at line 1678 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.InterpolationMoveState.FAULT, com.neuronrobotics.sdk.pid.InterpolationEngine.getInterpolationUnitIncrement(), com.neuronrobotics.sdk.addons.kinematics.InterpolationMoveState.READY, com.neuronrobotics.sdk.pid.InterpolationEngine.setSetpointWithTime(), and com.neuronrobotics.sdk.util.ThreadUtil.wait().
◆ boundedLinkValueSet()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.boundedLinkValueSet | ( | int | index, |
| double | value | ||
| ) | throws Exception |
Definition at line 1517 of file AbstractKinematicsNR.java.
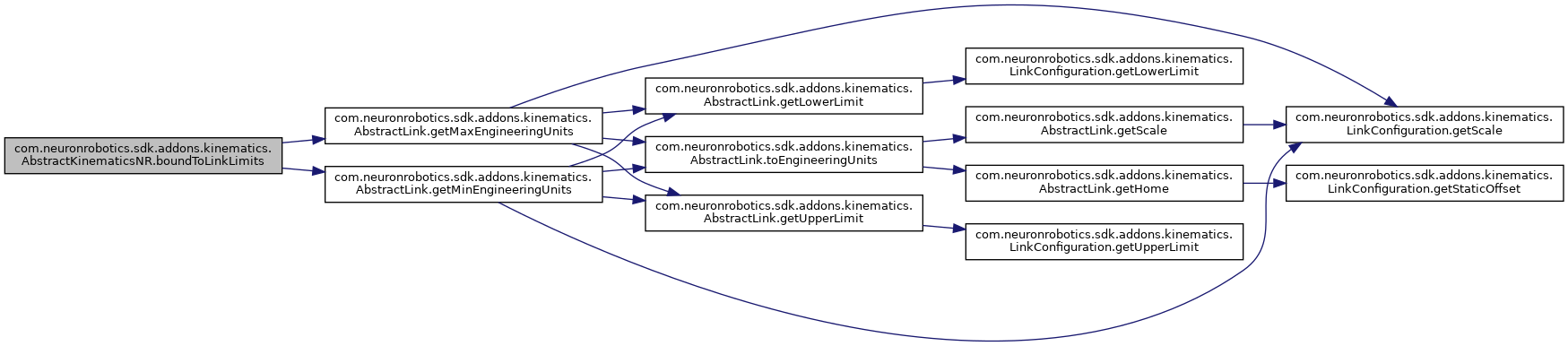
◆ boundToLinkLimits()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.boundToLinkLimits | ( | int | index, |
| double | value | ||
| ) |
Definition at line 1524 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxEngineeringUnits(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMinEngineeringUnits().
◆ calcForward()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.calcForward | ( | double[] | jointSpaceVect | ) |
Calc forward.
- Parameters
-
jointSpaceVect the joint space vect
- Returns
- the transform nr
Definition at line 783 of file AbstractKinematicsNR.java.
◆ calcHome()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.calcHome | ( | ) |
Calc home.
- Returns
- the transform nr
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.
Definition at line 792 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.calcHome(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.calcHome(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.getTipLocations().
◆ checkTaskSpaceTransform() [1/4]
|
static |
Checks the desired pose for ability for the IK to calculate a valid pose.
- Parameters
-
taskSpaceTransform the task space transform
- Returns
- True if pose is reachable, false if it is not
Definition at line 621 of file AbstractKinematicsNR.java.
◆ checkTaskSpaceTransform() [2/4]
|
static |
Checks the desired pose for ability for the IK to calculate a valid pose.
- Parameters
-
taskSpaceTransform the task space transform
- Returns
- True if pose is reachable, false if it is not
Definition at line 605 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.inverseKinematics(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.inverseOffset().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkTaskSpaceTransform(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setCurrentPoseTarget().

◆ checkTaskSpaceTransform() [3/4]
| boolean com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkTaskSpaceTransform | ( | TransformNR | taskSpaceTransform | ) |
Checks the desired pose for ability for the IK to calculate a valid pose.
- Parameters
-
taskSpaceTransform the task space transform
- Returns
- True if pose is reachable, false if it is not
Definition at line 670 of file AbstractKinematicsNR.java.
◆ checkTaskSpaceTransform() [4/4]
| boolean com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkTaskSpaceTransform | ( | TransformNR | taskSpaceTransform, |
| double | seconds | ||
| ) |
Checks the desired pose for ability for the IK to calculate a valid pose.
- Parameters
-
taskSpaceTransform the task space transform
- Returns
- True if pose is reachable, false if it is not
Definition at line 661 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkTaskSpaceTransform().

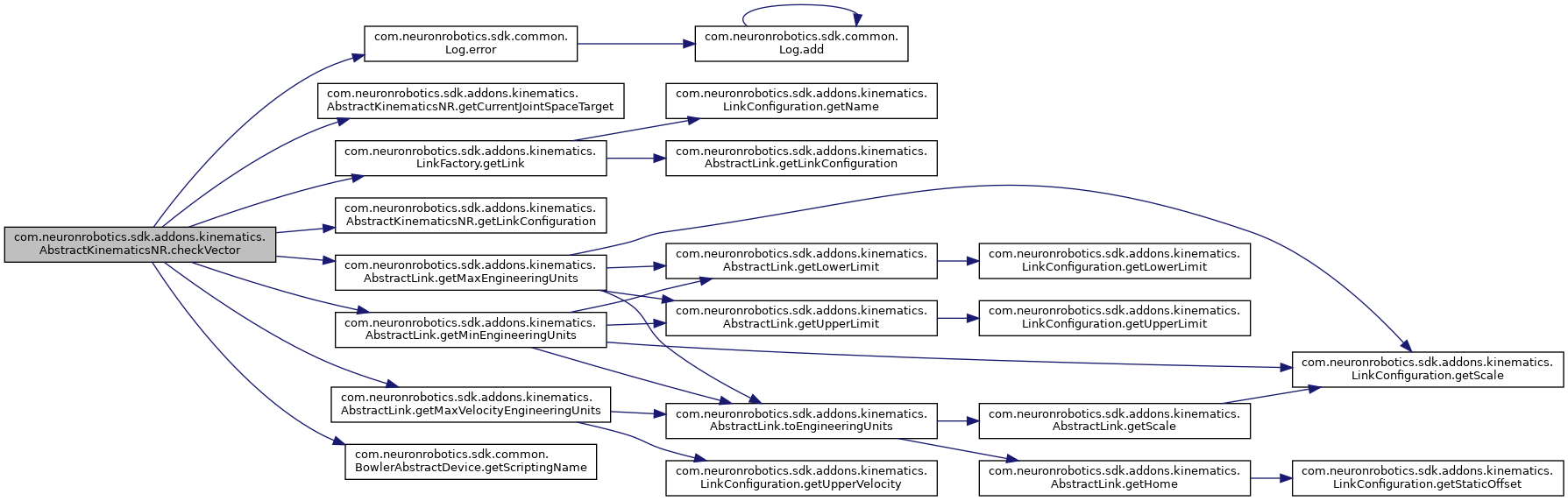
◆ checkVector()
|
staticprivate |
Definition at line 624 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.common.Log.error(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.factory, com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentJointSpaceTarget(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getLinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxVelocityEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMinEngineeringUnits(), and com.neuronrobotics.sdk.common.BowlerAbstractDevice.getScriptingName().
◆ clearChangeListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.clearChangeListener | ( | int | linkIndex | ) |
Definition at line 1636 of file AbstractKinematicsNR.java.
◆ connectDevice()
|
abstract |
Connect device.
- Returns
- true, if successful
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup, com.neuronrobotics.sdk.addons.kinematics.MobileBase, com.neuronrobotics.sdk.addons.kinematics.GenericKinematicsModelNR, and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.
◆ connectDeviceImp()
| boolean com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.connectDeviceImp | ( | ) |
Connect device imp.
- Returns
- true, if successful
Reimplemented from com.neuronrobotics.sdk.common.NonBowlerDevice.
Definition at line 181 of file AbstractKinematicsNR.java.
◆ disconnectDevice()
|
abstract |
This method tells the connection object to disconnect its pipes and close out the connection. Once this is called, it is safe to remove your device.
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup, com.neuronrobotics.sdk.addons.kinematics.MobileBase, com.neuronrobotics.sdk.addons.kinematics.GenericKinematicsModelNR, and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.
◆ disconnectDeviceImp()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.disconnectDeviceImp | ( | ) |
This method tells the connection object to disconnect its pipes and close out the connection. Once this is called, it is safe to remove your device.
Reimplemented from com.neuronrobotics.sdk.common.NonBowlerDevice.
Definition at line 167 of file AbstractKinematicsNR.java.
◆ emergencyStop()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.emergencyStop | ( | ) |
This is a quick stop for all axis of the robot.
Definition at line 1258 of file AbstractKinematicsNR.java.
◆ fireJointSpaceLimitUpdate()
|
private |
Fire joint space limit update.
- Parameters
-
axis the axis event the event
Definition at line 890 of file AbstractKinematicsNR.java.
◆ firePoseTransform()
|
protected |
Fire pose transform.
- Parameters
-
transform the transform
Definition at line 848 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.ITaskSpaceUpdateListenerNR.onTaskSpaceUpdate().

◆ firePoseUpdate()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.firePoseUpdate | ( | ) |
Fire pose update.
Definition at line 858 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.IJointSpaceUpdateListenerNR.onJointSpaceUpdate().

◆ fireTargetJointsUpdate()
|
protected |
Fire target joints update.
- Parameters
-
jointSpaceVector the joint space vector fwd the fwd
Definition at line 876 of file AbstractKinematicsNR.java.
◆ forwardKinematics()
|
abstract |
Forward kinematics.
- Parameters
-
jointSpaceVector the joint space vector
- Returns
- 6x1 vector in task space, unit in mm,radians [x,y,z,rotx,rotY,rotZ]
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup, com.neuronrobotics.sdk.addons.kinematics.MobileBase, com.neuronrobotics.sdk.addons.kinematics.GenericKinematicsModelNR, and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.
◆ forwardOffset()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.forwardOffset | ( | TransformNR | t | ) |
Forward offset.
- Parameters
-
t the t
- Returns
- the transform nr
Definition at line 1002 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getMatrixTransform().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.fireBaseUpdates(), com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardOffset(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateBase().

◆ getAbstractLink()
| AbstractLink com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getAbstractLink | ( | int | index | ) |
Gets the abstract link.
- Parameters
-
index the index
- Returns
- the abstract link
Definition at line 444 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.throwExceptionOnJointLimit(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateLimb().
◆ getAxisPidConfiguration()
| ArrayList<PIDConfiguration> com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getAxisPidConfiguration | ( | ) |
Gets the axis pid configuration.
- Returns
- the axis pid configuration
Definition at line 1273 of file AbstractKinematicsNR.java.
◆ getBestTime() [1/2]
| double com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getBestTime | ( | double[] | jointSpaceVect | ) |
get the best possible time for a translation by checking the joint velocities
- Parameters
-
jointSpaceVect new joint pose
- Returns
- the time of translation at best possible speed based on checking each link
Definition at line 697 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxVelocityEngineeringUnits().

◆ getBestTime() [2/2]
| double com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getBestTime | ( | TransformNR | currentTaskSpaceTransform | ) |
get the best possible time for a translation by checking the joint velocities
- Parameters
-
currentTaskSpaceTransform new tip location to check
- Returns
- the time of translation at best possible speed based on checking each link
Definition at line 680 of file AbstractKinematicsNR.java.
◆ getCode()
|
protected |
Gets the code.
- Parameters
-
e the e tag the tag
- Returns
- the code
Definition at line 1452 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.xml.XmlFactory.getTagValue().

◆ getCurrentJointSpaceTarget()
| double [] com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentJointSpaceTarget | ( | ) |
Definition at line 553 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkVector().
◆ getCurrentJointSpaceVector()
| double [] com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentJointSpaceVector | ( | ) |
This takes a reading of the robots position and converts it to a joint pace vector This vector is converted to Joint space and returned .
- Returns
- JointSpaceVector in mm,radians
Definition at line 537 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChainTransformations(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.inverseKinematics(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.linkCoM(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setGlobalToFiducialTransform(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.updateCadLocations().
◆ getCurrentLinkEngineeringUnits()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentLinkEngineeringUnits | ( | int | linkIndex | ) |
Definition at line 561 of file AbstractKinematicsNR.java.
◆ getCurrentPoseTarget()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentPoseTarget | ( | ) |
Gets the current pose target.
- Returns
- the current pose target
Definition at line 1299 of file AbstractKinematicsNR.java.
◆ getCurrentTaskSpaceTransform()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentTaskSpaceTransform | ( | ) |
This takes a reading of the robots position and converts it to a joint space vector This vector is converted to task space and returned .
- Returns
- taskSpaceVector in mm,radians [x,y,z,rotx,rotY,rotZ]
Definition at line 516 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.main().
◆ getDate()
|
private |
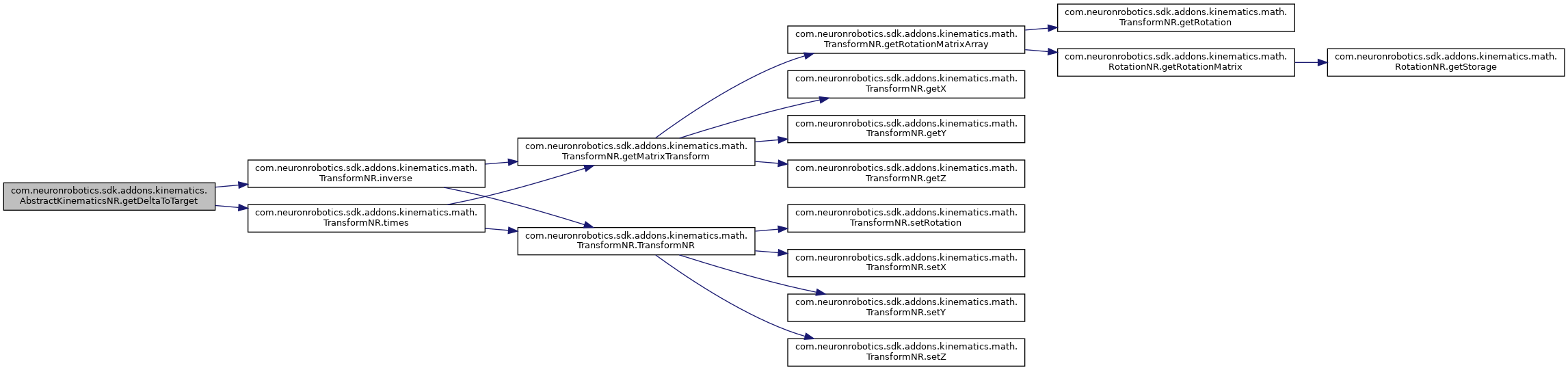
◆ getDeltaToTarget()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getDeltaToTarget | ( | TransformNR | target | ) |
Definition at line 1656 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.inverse(), and com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.times().
◆ getDevice()
|
protected |
◆ getDeviceMaximumValue()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getDeviceMaximumValue | ( | int | linkIndex | ) |
Override this method to specify a larger range
- Returns
- the maximum value possible for a link
Definition at line 1620 of file AbstractKinematicsNR.java.
◆ getDeviceMinimumValue()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getDeviceMinimumValue | ( | int | linkIndex | ) |
Override this method to specify a larger range
- Returns
- the minimum value possible for a link
Definition at line 1627 of file AbstractKinematicsNR.java.
◆ getDhParametersChain()
| DHChain com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getDhParametersChain | ( | ) |
Gets the dh parameters chain.
- Returns
- the dh parameters chain
Definition at line 1394 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics().
◆ getElectroMechanicalSize()
| String com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getElectroMechanicalSize | ( | int | linkIndex | ) |
Definition at line 1584 of file AbstractKinematicsNR.java.
◆ getElectroMechanicalType()
| String com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getElectroMechanicalType | ( | int | linkIndex | ) |
Definition at line 1576 of file AbstractKinematicsNR.java.
◆ getFactory()
| LinkFactory com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFactory | ( | ) |
Gets the factory.
- Returns
- the factory
Definition at line 1331 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.addListeners(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.generateCad(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.removeLimb(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.removeLink(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup().
◆ getFiducialToGlobalTransform()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFiducialToGlobalTransform | ( | ) |
Gets the fiducial to global transform.
- Returns
- the fiducial to global transform
Definition at line 901 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.WalkingDriveEngine.DriveArc(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getEmbedableXml(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.pose(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.run(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateBase(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateLimb().
◆ getGitCadEngine()
| String [] com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getGitCadEngine | ( | ) |
Gets the cad engine.
- Returns
- the cad engine
Definition at line 1431 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.getCadScriptFromLimnb(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.getCadScriptFromMobileBase(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getEmbedableXml(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.getIgenerateBed().
◆ getGitCodes()
|
protected |
Gets the gist codes.
- Parameters
-
doc the doc tag the tag
- Returns
- the gist codes
Definition at line 1475 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().
◆ getGitDhEngine()
| String [] com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getGitDhEngine | ( | ) |
Gets the dh engine.
- Returns
- the dh engine
Definition at line 1412 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getEmbedableXml(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseLoader.setDefaultDhParameterKinematics().
◆ getImu()
| IMU com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getImu | ( | ) |
Definition at line 1511 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().
◆ getLinkConfiguration()
| LinkConfiguration com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getLinkConfiguration | ( | int | linkIndex | ) |
Gets the link configuration.
- Parameters
-
linkIndex the link index
- Returns
- the link configuration
Definition at line 394 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkVector(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.generateCad(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getEmbedableXml(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.linkCoM(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain().
◆ getLinkConfigurations()
| ArrayList<LinkConfiguration> com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getLinkConfigurations | ( | ) |
Gets the link configurations.
- Returns
- the link configurations
Definition at line 403 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics().
◆ getLinkCurrentConfiguration()
| PIDConfiguration com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getLinkCurrentConfiguration | ( | int | chan | ) |
Gets the link current configuration.
- Parameters
-
chan the chan
- Returns
- the link current configuration
Definition at line 415 of file AbstractKinematicsNR.java.
◆ getMaxEngineeringUnits()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getMaxEngineeringUnits | ( | int | linkIndex | ) |
Gets the max engineering units.
- Returns
- the max engineering units
Definition at line 1544 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.WristNormalizer.score().
◆ getMinEngineeringUnits()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getMinEngineeringUnits | ( | int | linkIndex | ) |
Gets the min engineering units.
- Returns
- the min engineering units
Definition at line 1553 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.WristNormalizer.score().
◆ getNamespacesImp()
| ArrayList<String> com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getNamespacesImp | ( | ) |
Gets the namespaces imp.
- Returns
- the namespaces imp
Reimplemented from com.neuronrobotics.sdk.common.NonBowlerDevice.
Definition at line 155 of file AbstractKinematicsNR.java.
◆ getNumberOfLinks()
| int com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getNumberOfLinks | ( | ) |
Gets the number of links defined in the configuration file.
- Returns
- number of links in XML
Definition at line 506 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.addListeners(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.DHParameterKinematics(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.generateCad(), com.neuronrobotics.sdk.addons.kinematics.GenericKinematicsModelNR.inverseKinematics(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.inverseKinematics(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.set(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.throwExceptionOnJointLimit().
◆ getRetryNumberBeforeFail()
| int com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getRetryNumberBeforeFail | ( | ) |
Gets the retry number before fail.
- Returns
- the retry number before fail
Definition at line 1360 of file AbstractKinematicsNR.java.
◆ getRobotToFiducialTransform()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getRobotToFiducialTransform | ( | ) |
Gets the robot to fiducial transform.
- Returns
- the robot to fiducial transform
Definition at line 943 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getEmbedableXml(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), and com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().
◆ getRootListener()
| Object com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getRootListener | ( | ) |
Gets the root listener.
- Returns
- the root listener
Definition at line 122 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.selectCsgByLimb(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateBase().
◆ getShaftSize()
| String com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getShaftSize | ( | int | linkIndex | ) |
Definition at line 1600 of file AbstractKinematicsNR.java.
◆ getShaftType()
| String com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getShaftType | ( | int | linkIndex | ) |
Definition at line 1592 of file AbstractKinematicsNR.java.
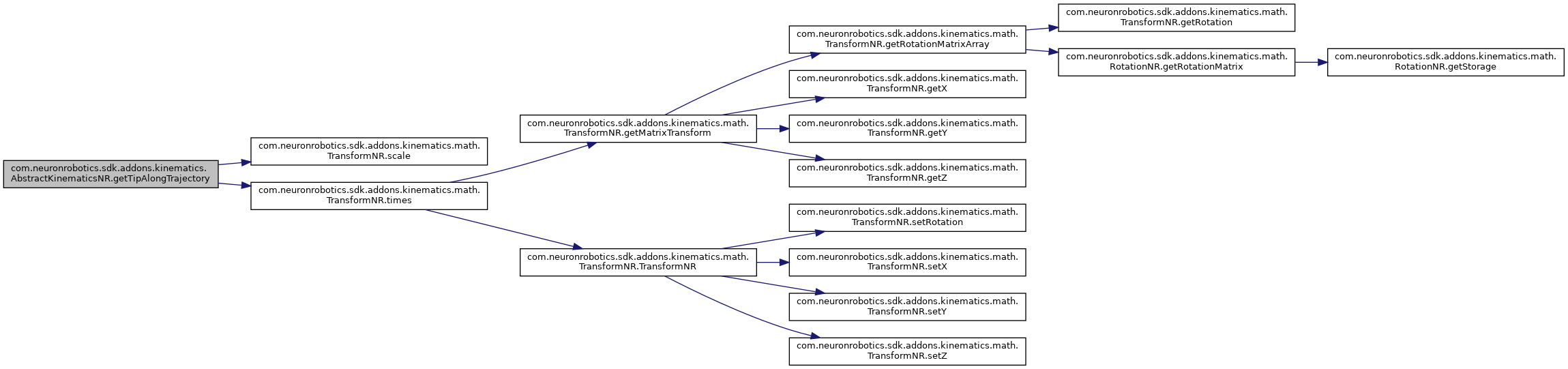
◆ getTipAlongTrajectory()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getTipAlongTrajectory | ( | TransformNR | startingPoint, |
| TransformNR | deltaToTarget, | ||
| double | unitIncrement | ||
| ) |
Definition at line 1662 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.scale(), and com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.times().
◆ getXml()
| String com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getXml | ( | ) |
Gets the xml.
- Returns
- the xml
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.MobileBase, and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.
Definition at line 367 of file AbstractKinematicsNR.java.
◆ homeAllLinks()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.homeAllLinks | ( | ) |
This method uses the latch values to home all of the robot links.
Definition at line 1150 of file AbstractKinematicsNR.java.
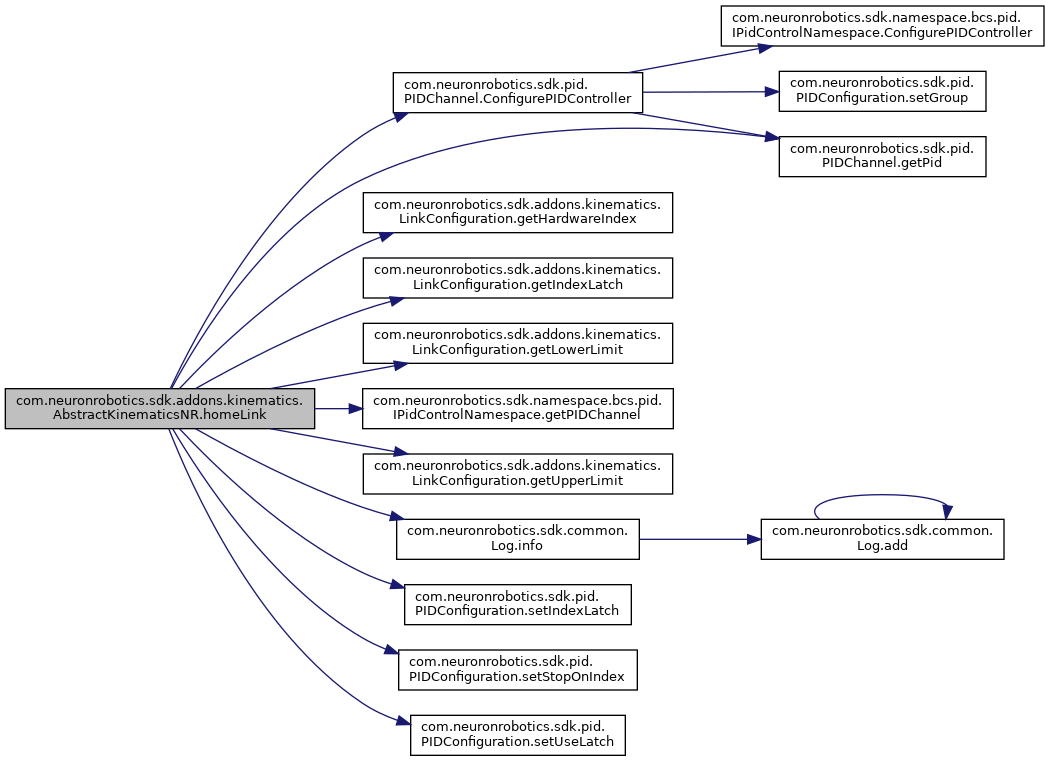
◆ homeLink()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.homeLink | ( | int | link | ) |
Home link.
- Parameters
-
link the link
Definition at line 1206 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.pid.PIDChannel.ConfigurePIDController(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getIndexLatch(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLowerLimit(), com.neuronrobotics.sdk.pid.PIDChannel.getPid(), com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.getPIDChannel(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperLimit(), com.neuronrobotics.sdk.common.Log.info(), com.neuronrobotics.sdk.addons.kinematics.LinkType.PID, com.neuronrobotics.sdk.pid.PIDConfiguration.setIndexLatch(), com.neuronrobotics.sdk.pid.PIDConfiguration.setStopOnIndex(), and com.neuronrobotics.sdk.pid.PIDConfiguration.setUseLatch().
◆ inverseKinematics()
|
abstract |
Inverse kinematics.
- Parameters
-
taskSpaceTransform the task space transform
- Returns
- Nx1 vector in task space, in mm where N is number of links
- Exceptions
-
Exception the exception
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup, com.neuronrobotics.sdk.addons.kinematics.MobileBase, com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics, and com.neuronrobotics.sdk.addons.kinematics.GenericKinematicsModelNR.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkTaskSpaceTransform().
◆ inverseOffset()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.inverseOffset | ( | TransformNR | t | ) |
Inverse offset.
- Parameters
-
t the t
- Returns
- the transform nr
Definition at line 983 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getMatrixTransform().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkTaskSpaceTransform(), and com.neuronrobotics.sdk.addons.kinematics.ik.DeltaIKModel.inverseKinematics6dof().

◆ isNoFlush()
| boolean com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.isNoFlush | ( | ) |
Checks if is no flush.
- Returns
- true, if is no flush
Definition at line 1351 of file AbstractKinematicsNR.java.
◆ linkMass()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.linkMass | ( | int | linkIndex | ) |
Definition at line 1535 of file AbstractKinematicsNR.java.
◆ loadConfig()
|
protected |
Load XML configuration file, then store in LinkConfiguration (ArrayList type).
- Parameters
-
doc the doc
- Returns
- the array list
Definition at line 260 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getSlaveLinks(), com.neuronrobotics.sdk.addons.kinematics.xml.XmlFactory.getTagValue(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setMobileBaseXml().

◆ onLinkLimit()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.onLinkLimit | ( | AbstractLink | source, |
| PIDLimitEvent | event | ||
| ) |
On the event of a limit, this is called.
- Parameters
-
source the source event the event
Implements com.neuronrobotics.sdk.addons.kinematics.ILinkListener.
Definition at line 1381 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLinkConfiguration().

◆ onLinkPositionUpdate()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.onLinkPositionUpdate | ( | AbstractLink | source, |
| double | engineeringUnitsValue | ||
| ) |
On link position update.
- Parameters
-
source the source engineeringUnitsValue the engineering units value
Implements com.neuronrobotics.sdk.addons.kinematics.ILinkListener.
Definition at line 1086 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.common.Log.error().

◆ onPIDEvent()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.onPIDEvent | ( | PIDEvent | e | ) |
On pid event.
- Parameters
-
e the e
Implements com.neuronrobotics.sdk.pid.IPIDEventListener.
Definition at line 1119 of file AbstractKinematicsNR.java.
◆ onPIDLimitEvent()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.onPIDLimitEvent | ( | PIDLimitEvent | e | ) |
On pid limit event.
- Parameters
-
e the e
Implements com.neuronrobotics.sdk.pid.IPIDEventListener.
Definition at line 1130 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.pid.PIDLimitEvent.getGroup().

◆ onPIDReset()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.onPIDReset | ( | int | group, |
| float | currentValue | ||
| ) |
On pid reset.
- Parameters
-
group the group currentValue the current value
Implements com.neuronrobotics.sdk.pid.IPIDEventListener.
Definition at line 1143 of file AbstractKinematicsNR.java.
◆ readLinkTarget()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.readLinkTarget | ( | int | index | ) |
Definition at line 528 of file AbstractKinematicsNR.java.
◆ readLinkValue()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.readLinkValue | ( | int | index | ) |
Definition at line 525 of file AbstractKinematicsNR.java.
◆ removeChangeListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.removeChangeListener | ( | int | linkIndex, |
| ILinkConfigurationChangeListener | l | ||
| ) |
Definition at line 1633 of file AbstractKinematicsNR.java.
◆ removeJointSpaceUpdateListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.removeJointSpaceUpdateListener | ( | IJointSpaceUpdateListenerNR | l | ) |
Removes the joint space update listener.
- Parameters
-
l the l
Definition at line 1026 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.disconnectDevice().
◆ removePoseUpdateListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.removePoseUpdateListener | ( | ITaskSpaceUpdateListenerNR | l | ) |
Removes the pose update listener.
- Parameters
-
l the l
Definition at line 1071 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.disconnectDevice().
◆ removeRegestrationUpdateListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.removeRegestrationUpdateListener | ( | IRegistrationListenerNR | l | ) |
Removes the regestration update listener.
- Parameters
-
l the l
Definition at line 1048 of file AbstractKinematicsNR.java.
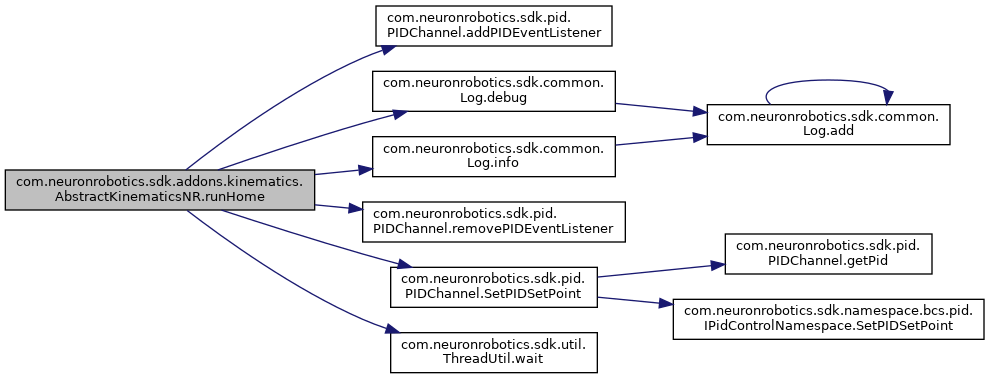
◆ runHome()
|
private |
Run home.
- Parameters
-
joint the joint tps the tps
Definition at line 1172 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.pid.PIDChannel.addPIDEventListener(), com.neuronrobotics.sdk.common.Log.debug(), com.neuronrobotics.sdk.common.Log.info(), com.neuronrobotics.sdk.pid.PIDChannel.removePIDEventListener(), com.neuronrobotics.sdk.pid.PIDChannel.SetPIDSetPoint(), and com.neuronrobotics.sdk.util.ThreadUtil.wait().
◆ runRenderWrangler()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.runRenderWrangler | ( | ) |
Definition at line 1642 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.refreshPose(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setGlobalToFiducialTransform(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.updatePositions().
◆ setCurrentPoseTarget()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setCurrentPoseTarget | ( | TransformNR | currentPoseTarget | ) |
Sets the current pose target.
- Parameters
-
currentPoseTarget the new current pose target
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.
Definition at line 1310 of file AbstractKinematicsNR.java.
◆ setDesiredJointAxisValue()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDesiredJointAxisValue | ( | int | axis, |
| double | value, | ||
| double | seconds | ||
| ) | throws Exception |
Sets an individual target joint position .
- Parameters
-
axis the joint index to set value the value to set it to seconds the time for the transition to take from current position to target, unit seconds
- Exceptions
-
Exception If there is a workspace error
Definition at line 809 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getUpperLimit(), and com.neuronrobotics.sdk.common.Log.info().

◆ setDesiredJointSpaceVector()
| double [] com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDesiredJointSpaceVector | ( | double[] | jointSpaceVect, |
| double | seconds | ||
| ) | throws Exception |
This calculates the target pose .
- Parameters
-
jointSpaceVect the joint space vect seconds the time for the transition to take from current position to target, unit seconds
- Returns
- The joint space vector is returned for target arrival referance
- Exceptions
-
Exception If there is a workspace error
Definition at line 721 of file AbstractKinematicsNR.java.
◆ setDesiredTaskSpaceTransform()
| double [] com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDesiredTaskSpaceTransform | ( | TransformNR | taskSpaceTransform, |
| double | seconds | ||
| ) | throws Exception |
This calculates the target pose .
- Parameters
-
taskSpaceTransform the task space transform seconds the time for the transition to take from current position to target, unit seconds
- Returns
- The joint space vector is returned for target arrival referance
- Exceptions
-
Exception If there is a workspace error
Definition at line 574 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.common.Log.info(), and com.neuronrobotics.sdk.common.TickToc.tic().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.initializeParalellGroups(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.main().

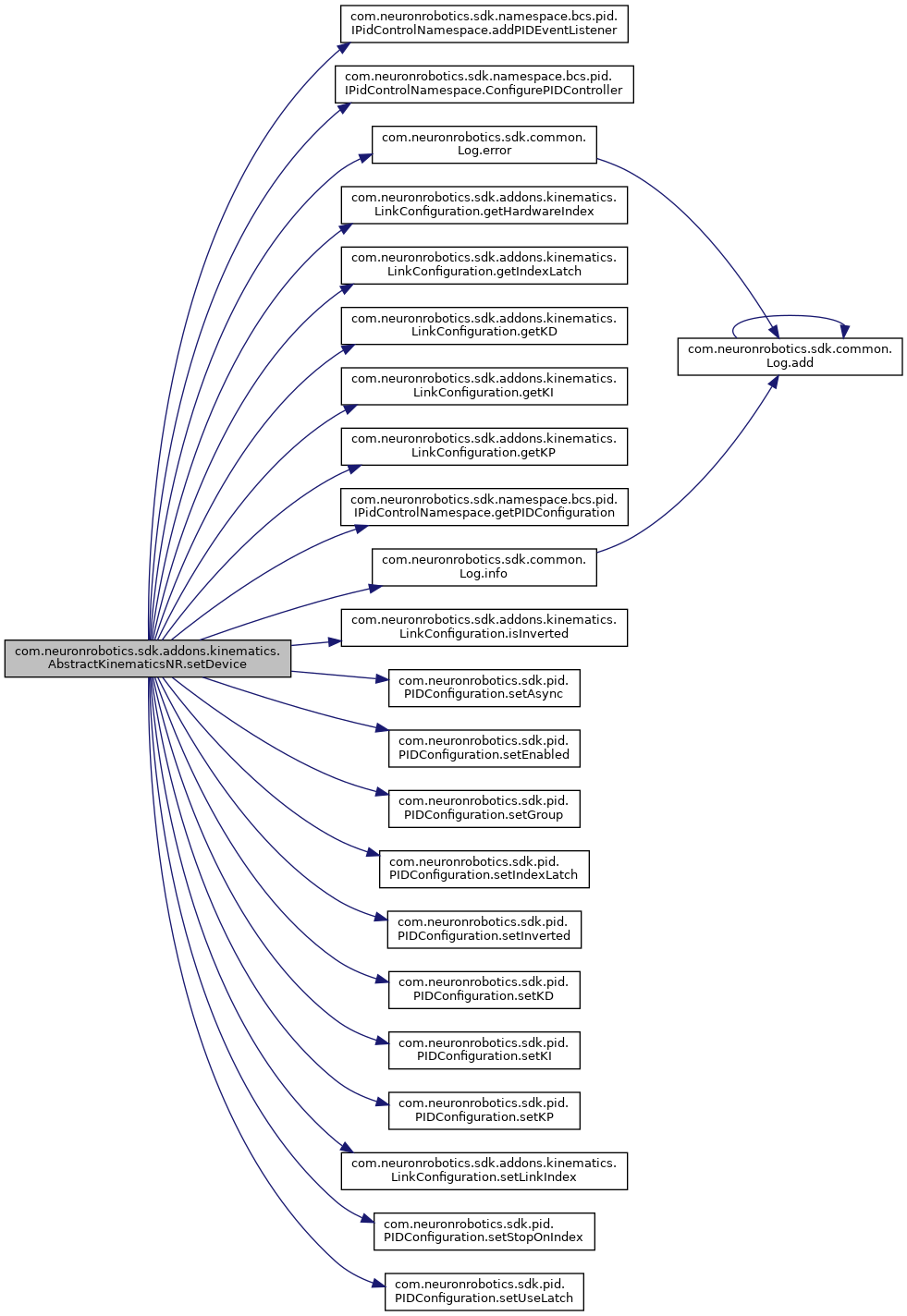
◆ setDevice()
|
protected |
Sets the device.
- Parameters
-
f the f linkConfigs the link configs
Definition at line 454 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.addPIDEventListener(), com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.ConfigurePIDController(), com.neuronrobotics.sdk.common.Log.error(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getIndexLatch(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getKD(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getKI(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getKP(), com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.getPIDConfiguration(), com.neuronrobotics.sdk.common.Log.info(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isInverted(), com.neuronrobotics.sdk.addons.kinematics.LinkType.PID, com.neuronrobotics.sdk.pid.PIDConfiguration.setAsync(), com.neuronrobotics.sdk.pid.PIDConfiguration.setEnabled(), com.neuronrobotics.sdk.pid.PIDConfiguration.setGroup(), com.neuronrobotics.sdk.pid.PIDConfiguration.setIndexLatch(), com.neuronrobotics.sdk.pid.PIDConfiguration.setInverted(), com.neuronrobotics.sdk.pid.PIDConfiguration.setKD(), com.neuronrobotics.sdk.pid.PIDConfiguration.setKI(), com.neuronrobotics.sdk.pid.PIDConfiguration.setKP(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setLinkIndex(), com.neuronrobotics.sdk.pid.PIDConfiguration.setStopOnIndex(), and com.neuronrobotics.sdk.pid.PIDConfiguration.setUseLatch().
◆ setDeviceMaximumValue()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDeviceMaximumValue | ( | int | linkIndex, |
| double | max | ||
| ) |
Override this method to specify a larger range
Definition at line 1606 of file AbstractKinematicsNR.java.
◆ setDeviceMinimumValue()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDeviceMinimumValue | ( | int | linkIndex, |
| double | min | ||
| ) |
Override this method to specify a larger range
Definition at line 1613 of file AbstractKinematicsNR.java.
◆ setDhParametersChain()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDhParametersChain | ( | DHChain | dhParametersChain | ) |
Sets the dh parameters chain.
- Parameters
-
dhParametersChain the new dh parameters chain
Definition at line 1403 of file AbstractKinematicsNR.java.
◆ setElectroMechanicalSize()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setElectroMechanicalSize | ( | int | linkIndex, |
| String | electroMechanicalSize | ||
| ) |
Definition at line 1588 of file AbstractKinematicsNR.java.
◆ setElectroMechanicalType()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setElectroMechanicalType | ( | int | linkIndex, |
| String | electroMechanicalType | ||
| ) |
Definition at line 1580 of file AbstractKinematicsNR.java.
◆ setFactory()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setFactory | ( | LinkFactory | factory | ) |
Sets the factory.
- Parameters
-
factory the new factory
Definition at line 1322 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.removeLimb().
◆ setGitCadEngine()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setGitCadEngine | ( | String[] | cadEngine | ) |
Sets the cad engine.
- Parameters
-
cadEngine the new cad engine
Definition at line 1440 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.bowlerstudio.scripting.RobotHelper.getDefaultContents(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().
◆ setGitDhEngine()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setGitDhEngine | ( | String[] | dhEngine | ) |
Sets the dh engine.
- Parameters
-
dhEngine the new dh engine
Definition at line 1421 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.bowlerstudio.scripting.RobotHelper.getDefaultContents(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseLoader.setGitDhEngine().
◆ setGlobalToFiducialTransform() [1/2]
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setGlobalToFiducialTransform | ( | TransformNR | frameToBase | ) |
Sets the global to fiducial transform.
- Parameters
-
frameToBase the new global to fiducial transform
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.
Definition at line 974 of file AbstractKinematicsNR.java.
◆ setGlobalToFiducialTransform() [2/2]
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setGlobalToFiducialTransform | ( | TransformNR | frameToBase, |
| boolean | fireUpdate | ||
| ) |
Sets the global to fiducial transform.
- Parameters
-
frameToBase the new global to fiducial transform
Definition at line 952 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.common.Log.error(), and com.neuronrobotics.sdk.addons.kinematics.IRegistrationListenerNR.onFiducialToGlobalUpdate().
Referenced by com.neuronrobotics.sdk.addons.kinematics.WalkingDriveEngine.DriveArc(), com.neuronrobotics.sdk.addons.kinematics.DHLink.fireOnLinkGlobalPositionChange(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.pose(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.setFiducialToGlobalTransform(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateBase().

◆ setLinkCurrentConfiguration()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setLinkCurrentConfiguration | ( | int | chan, |
| PIDConfiguration | c | ||
| ) |
Sets the link current configuration.
- Parameters
-
chan the chan c the c
Definition at line 425 of file AbstractKinematicsNR.java.
◆ setMaxEngineeringUnits()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setMaxEngineeringUnits | ( | int | linkIndex, |
| double | maxLimit | ||
| ) |
Sets the max engineering units.
- Parameters
-
maxLimit the max engineering units
Definition at line 1563 of file AbstractKinematicsNR.java.
◆ setMinEngineeringUnits()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setMinEngineeringUnits | ( | int | linkIndex, |
| double | minLimit | ||
| ) |
Sets the min engineering units.
- Parameters
-
minLimit the min engineering units
Definition at line 1572 of file AbstractKinematicsNR.java.
◆ setNoFlush()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setNoFlush | ( | boolean | noFlush | ) |
Sets the no flush.
- Parameters
-
noFlush the new no flush
Definition at line 1342 of file AbstractKinematicsNR.java.
◆ setRenderWrangler()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setRenderWrangler | ( | Runnable | renderWrangler | ) |
Definition at line 1652 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.setMobileBase().
◆ setRetryNumberBeforeFail()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setRetryNumberBeforeFail | ( | int | retryNumberBeforeFail | ) |
Sets the retry number before fail.
- Parameters
-
retryNumberBeforeFail the new retry number before fail
Definition at line 1369 of file AbstractKinematicsNR.java.
◆ setRobotToFiducialTransform()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setRobotToFiducialTransform | ( | TransformNR | baseToFiducial | ) |
Reimplemented in com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.
Definition at line 914 of file AbstractKinematicsNR.java.
References com.neuronrobotics.sdk.common.Log.error(), and com.neuronrobotics.sdk.common.Log.info().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().

◆ setRootListener()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setRootListener | ( | Object | listener | ) |
Sets the root listener.
- Parameters
-
listener the new root listener
Definition at line 131 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateBase().
◆ setShaftType()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setShaftType | ( | int | linkIndex, |
| String | shaftType | ||
| ) |
Definition at line 1596 of file AbstractKinematicsNR.java.
Member Data Documentation
◆ base2Fiducial
|
private |
The base2 fiducial.
Definition at line 85 of file AbstractKinematicsNR.java.
◆ cadEngine
|
private |
The cad engine.
Definition at line 71 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setGitCadToolEngine().
◆ currentPoseTarget
|
private |
The current joint space positions. The current joint space target. The current pose target.
Definition at line 82 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setCurrentPoseTarget().
◆ dhEngine
|
private |
The dh engine.
Definition at line 67 of file AbstractKinematicsNR.java.
◆ dhParametersChain
|
private |
The dh parameters chain.
Definition at line 97 of file AbstractKinematicsNR.java.
◆ factory
|
private |
The factory.
Definition at line 105 of file AbstractKinematicsNR.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkVector(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.removeLink().
◆ fiducial2RAS
|
private |
The fiducial2 ras.
Definition at line 88 of file AbstractKinematicsNR.java.
◆ homeTime
|
private |
This method uses the latch values to home the given link of the robot links.
Definition at line 1164 of file AbstractKinematicsNR.java.
◆ imu
The object for communicating IMU information and registering it with the hardware
Definition at line 113 of file AbstractKinematicsNR.java.
◆ jointSpaceUpdateListeners
|
protected |
The joint space update listeners.
Definition at line 58 of file AbstractKinematicsNR.java.
◆ mobileBases
|
private |
The mobile bases.
Definition at line 64 of file AbstractKinematicsNR.java.
◆ noFlush
|
private |
The no flush.
Definition at line 91 of file AbstractKinematicsNR.java.
◆ noXmlConfig
|
private |
The no xml config.
Definition at line 94 of file AbstractKinematicsNR.java.
◆ pidConfigurations
|
private |
The configurations.
Definition at line 52 of file AbstractKinematicsNR.java.
◆ regListeners
|
private |
The reg listeners.
Definition at line 61 of file AbstractKinematicsNR.java.
◆ renderWrangler
|
private |
Definition at line 115 of file AbstractKinematicsNR.java.
◆ retryNumberBeforeFail
|
private |
The retry number before fail.
Definition at line 108 of file AbstractKinematicsNR.java.
◆ root
|
private |
The root.
Definition at line 100 of file AbstractKinematicsNR.java.
◆ taskSpaceUpdateListeners
|
private |
The task space update listeners.
Definition at line 55 of file AbstractKinematicsNR.java.
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/AbstractKinematicsNR.java