Public Member Functions | |
| byte[] | getCallingData () |
| void | setOpCode (String opCode) |
| String | getOpCode () |
| void | setMethod (BowlerMethod method) |
| BowlerMethod | getMethod () |
| byte | getLength () |
| BowlerDatagram | validate (BowlerDatagram data) throws InvalidResponseException |
| byte[] | getBytes () |
| String | toString () |
| void | setData (ByteList data) |
| ByteList | getCallingDataStorage () |
| void | setNamespaceIndex (int namespaceIndex) |
| int | getNamespaceIndex () |
Static Public Member Functions | |
| static BowlerAbstractCommand | parse (BowlerDatagram data) |
Private Attributes | |
| String | opCode |
| BowlerMethod | method |
| ByteList | data = new ByteList() |
| int | namespaceIndex =0 |
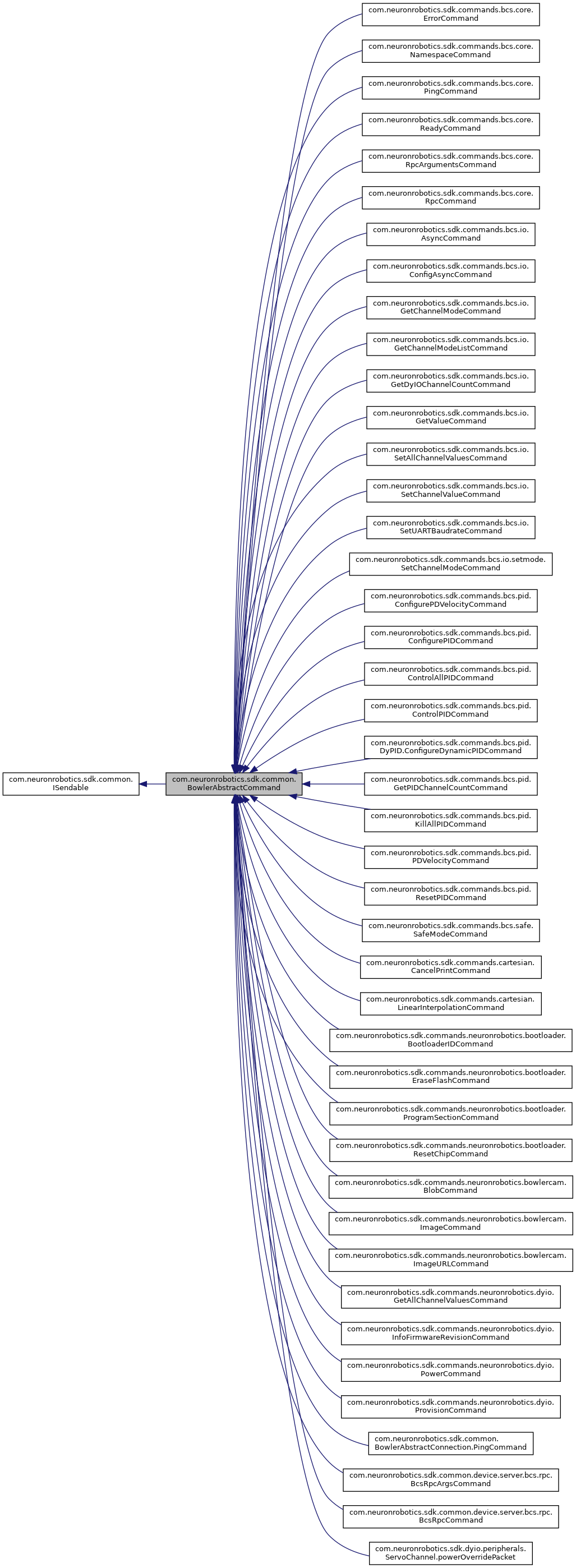
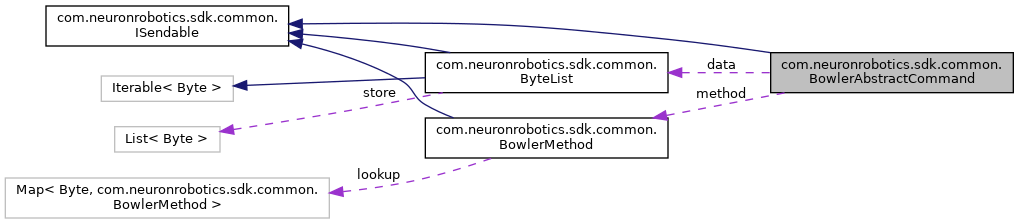
Detailed Description
This class encapsulates the generation of a Bowler RPC. Each command should represent a unique RPC.
Definition at line 42 of file BowlerAbstractCommand.java.
Member Function Documentation
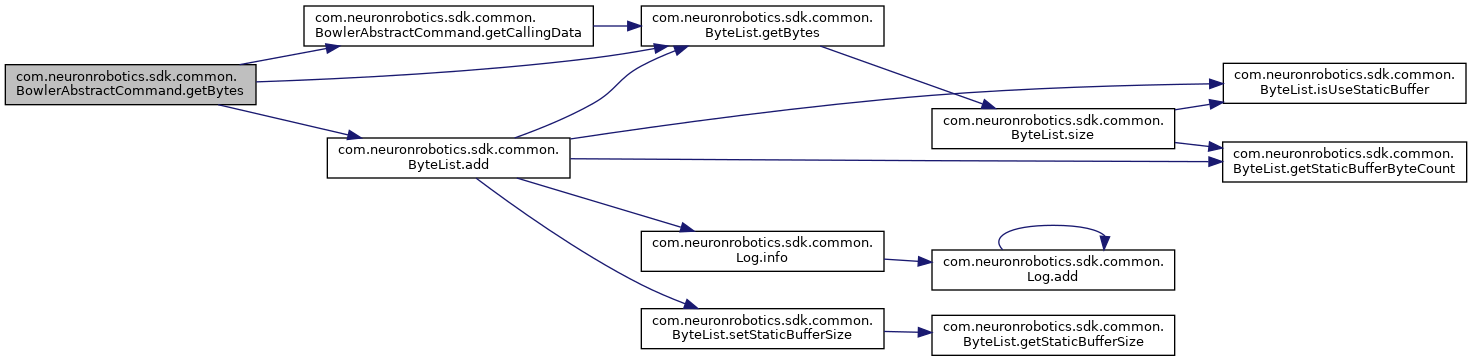
◆ getBytes()
| byte [] com.neuronrobotics.sdk.common.BowlerAbstractCommand.getBytes | ( | ) |
Gets the bytes.
- Returns
- the bytes
Implements com.neuronrobotics.sdk.common.ISendable.
Definition at line 208 of file BowlerAbstractCommand.java.
References com.neuronrobotics.sdk.common.ByteList.add(), com.neuronrobotics.sdk.common.ByteList.getBytes(), com.neuronrobotics.sdk.common.BowlerAbstractCommand.getCallingData(), and com.neuronrobotics.sdk.common.BowlerAbstractCommand.opCode.
Referenced by com.neuronrobotics.sdk.common.BowlerAbstractCommand.toString().
◆ getCallingData()
| byte [] com.neuronrobotics.sdk.common.BowlerAbstractCommand.getCallingData | ( | ) |
Get the data that will be used to call the RPC (i.e. parameters for the RPC). Each instance of a BAC should determine the correct method for generating this data.
- Returns
- the parameters for the RPC
Reimplemented in com.neuronrobotics.sdk.commands.bcs.io.GetValueCommand.
Definition at line 62 of file BowlerAbstractCommand.java.
References com.neuronrobotics.sdk.common.BowlerAbstractCommand.data, and com.neuronrobotics.sdk.common.ByteList.getBytes().
Referenced by com.neuronrobotics.sdk.common.BowlerAbstractCommand.getBytes(), and com.neuronrobotics.sdk.common.BowlerAbstractCommand.getLength().

◆ getCallingDataStorage()
| ByteList com.neuronrobotics.sdk.common.BowlerAbstractCommand.getCallingDataStorage | ( | ) |
Gets the calling data storage.
- Returns
- the calling data storage
Definition at line 244 of file BowlerAbstractCommand.java.
References com.neuronrobotics.sdk.common.BowlerAbstractCommand.data.
Referenced by com.neuronrobotics.sdk.commands.bcs.io.AsyncCommand.AsyncCommand(), com.neuronrobotics.sdk.common.device.server.bcs.rpc.BcsRpcArgsCommand.BcsRpcArgsCommand(), com.neuronrobotics.sdk.common.device.server.bcs.rpc.BcsRpcCommand.BcsRpcCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bowlercam.BlobCommand.BlobCommand(), com.neuronrobotics.sdk.commands.bcs.io.ConfigAsyncCommand.ConfigAsyncCommand(), com.neuronrobotics.sdk.commands.bcs.pid.DyPID.ConfigureDynamicPIDCommand.ConfigureDynamicPIDCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ConfigurePDVelocityCommand.ConfigurePDVelocityCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ConfigurePIDCommand.ConfigurePIDCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ControlAllPIDCommand.ControlAllPIDCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ControlPIDCommand.ControlPIDCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.EraseFlashCommand.EraseFlashCommand(), com.neuronrobotics.sdk.commands.bcs.core.ErrorCommand.ErrorCommand(), com.neuronrobotics.sdk.commands.bcs.io.GetChannelModeCommand.GetChannelModeCommand(), com.neuronrobotics.sdk.commands.bcs.io.GetChannelModeListCommand.GetChannelModeListCommand(), com.neuronrobotics.sdk.common.RpcEncapsulation.getCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bowlercam.ImageCommand.ImageCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bowlercam.ImageURLCommand.ImageURLCommand(), com.neuronrobotics.sdk.commands.cartesian.LinearInterpolationCommand.LinearInterpolationCommand(), com.neuronrobotics.sdk.commands.bcs.core.NamespaceCommand.NamespaceCommand(), com.neuronrobotics.sdk.commands.bcs.pid.PDVelocityCommand.PDVelocityCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.dyio.PowerCommand.PowerCommand(), com.neuronrobotics.sdk.dyio.peripherals.ServoChannel.powerOverridePacket.powerOverridePacket(), com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.ProgramSectionCommand.ProgramSectionCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.dyio.ProvisionCommand.ProvisionCommand(), com.neuronrobotics.sdk.commands.bcs.core.ReadyCommand.ReadyCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ResetPIDCommand.ResetPIDCommand(), com.neuronrobotics.sdk.commands.bcs.core.RpcArgumentsCommand.RpcArgumentsCommand(), com.neuronrobotics.sdk.commands.bcs.core.RpcCommand.RpcCommand(), com.neuronrobotics.sdk.commands.bcs.safe.SafeModeCommand.SafeModeCommand(), com.neuronrobotics.sdk.commands.bcs.io.SetAllChannelValuesCommand.SetAllChannelValuesCommand(), com.neuronrobotics.sdk.commands.bcs.io.setmode.SetChannelModeCommand.SetChannelModeCommand(), com.neuronrobotics.sdk.commands.bcs.io.SetChannelValueCommand.SetChannelValueCommand(), and com.neuronrobotics.sdk.commands.bcs.io.SetUARTBaudrateCommand.SetUARTBaudrateCommand().
◆ getLength()
| byte com.neuronrobotics.sdk.common.BowlerAbstractCommand.getLength | ( | ) |
Get the total size of the command including opcode and calling data.
- Returns
- the full size of the command
Definition at line 111 of file BowlerAbstractCommand.java.
References com.neuronrobotics.sdk.common.BowlerAbstractCommand.getCallingData(), and com.neuronrobotics.sdk.common.BowlerAbstractCommand.opCode.

◆ getMethod()
| BowlerMethod com.neuronrobotics.sdk.common.BowlerAbstractCommand.getMethod | ( | ) |
Get the method that the command will use for execution.
- Returns
- the method used
Definition at line 102 of file BowlerAbstractCommand.java.
References com.neuronrobotics.sdk.common.BowlerAbstractCommand.method.
◆ getNamespaceIndex()
| int com.neuronrobotics.sdk.common.BowlerAbstractCommand.getNamespaceIndex | ( | ) |
Gets the namespace index.
- Returns
- the namespace index
Definition at line 262 of file BowlerAbstractCommand.java.
References com.neuronrobotics.sdk.common.BowlerAbstractCommand.namespaceIndex.
◆ getOpCode()
| String com.neuronrobotics.sdk.common.BowlerAbstractCommand.getOpCode | ( | ) |
Returns the operation code.
- Returns
- the RPC operation code
Definition at line 84 of file BowlerAbstractCommand.java.
References com.neuronrobotics.sdk.common.BowlerAbstractCommand.opCode.
Referenced by com.neuronrobotics.sdk.commands.bcs.io.GetChannelModeCommand.validate(), and com.neuronrobotics.sdk.commands.bcs.io.GetValueCommand.validate().
◆ parse()
|
static |
Parses the.
- Parameters
-
data the data
- Returns
- the bowler abstract command
Definition at line 201 of file BowlerAbstractCommand.java.
◆ setData()
| void com.neuronrobotics.sdk.common.BowlerAbstractCommand.setData | ( | ByteList | data | ) |
Sets the data.
- Parameters
-
data the new data
Definition at line 235 of file BowlerAbstractCommand.java.
References com.neuronrobotics.sdk.common.BowlerAbstractCommand.data.
◆ setMethod()
| void com.neuronrobotics.sdk.common.BowlerAbstractCommand.setMethod | ( | BowlerMethod | method | ) |
Set the method that the command will use for execution.
- Parameters
-
method the new method
Definition at line 93 of file BowlerAbstractCommand.java.
References com.neuronrobotics.sdk.common.BowlerAbstractCommand.method.
Referenced by com.neuronrobotics.sdk.commands.bcs.io.AsyncCommand.AsyncCommand(), com.neuronrobotics.sdk.common.device.server.bcs.rpc.BcsRpcArgsCommand.BcsRpcArgsCommand(), com.neuronrobotics.sdk.common.device.server.bcs.rpc.BcsRpcCommand.BcsRpcCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bowlercam.BlobCommand.BlobCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.BootloaderIDCommand.BootloaderIDCommand(), com.neuronrobotics.sdk.commands.cartesian.CancelPrintCommand.CancelPrintCommand(), com.neuronrobotics.sdk.commands.bcs.io.ConfigAsyncCommand.ConfigAsyncCommand(), com.neuronrobotics.sdk.commands.bcs.pid.DyPID.ConfigureDynamicPIDCommand.ConfigureDynamicPIDCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ConfigurePDVelocityCommand.ConfigurePDVelocityCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ConfigurePIDCommand.ConfigurePIDCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ControlAllPIDCommand.ControlAllPIDCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ControlPIDCommand.ControlPIDCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.EraseFlashCommand.EraseFlashCommand(), com.neuronrobotics.sdk.commands.bcs.core.ErrorCommand.ErrorCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.dyio.GetAllChannelValuesCommand.GetAllChannelValuesCommand(), com.neuronrobotics.sdk.commands.bcs.io.GetChannelModeCommand.GetChannelModeCommand(), com.neuronrobotics.sdk.commands.bcs.io.GetChannelModeListCommand.GetChannelModeListCommand(), com.neuronrobotics.sdk.common.RpcEncapsulation.getCommand(), com.neuronrobotics.sdk.commands.bcs.io.GetDyIOChannelCountCommand.GetDyIOChannelCountCommand(), com.neuronrobotics.sdk.commands.bcs.pid.GetPIDChannelCountCommand.GetPIDChannelCountCommand(), com.neuronrobotics.sdk.commands.bcs.io.GetValueCommand.GetValueCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bowlercam.ImageCommand.ImageCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bowlercam.ImageURLCommand.ImageURLCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.dyio.InfoFirmwareRevisionCommand.InfoFirmwareRevisionCommand(), com.neuronrobotics.sdk.commands.bcs.pid.KillAllPIDCommand.KillAllPIDCommand(), com.neuronrobotics.sdk.commands.cartesian.LinearInterpolationCommand.LinearInterpolationCommand(), com.neuronrobotics.sdk.commands.bcs.core.NamespaceCommand.NamespaceCommand(), com.neuronrobotics.sdk.commands.bcs.pid.PDVelocityCommand.PDVelocityCommand(), com.neuronrobotics.sdk.commands.bcs.core.PingCommand.PingCommand(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.PingCommand.PingCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.dyio.PowerCommand.PowerCommand(), com.neuronrobotics.sdk.dyio.peripherals.ServoChannel.powerOverridePacket.powerOverridePacket(), com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.ProgramSectionCommand.ProgramSectionCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.dyio.ProvisionCommand.ProvisionCommand(), com.neuronrobotics.sdk.commands.bcs.core.ReadyCommand.ReadyCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.ResetChipCommand.ResetChipCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ResetPIDCommand.ResetPIDCommand(), com.neuronrobotics.sdk.commands.bcs.core.RpcArgumentsCommand.RpcArgumentsCommand(), com.neuronrobotics.sdk.commands.bcs.core.RpcCommand.RpcCommand(), com.neuronrobotics.sdk.commands.bcs.safe.SafeModeCommand.SafeModeCommand(), com.neuronrobotics.sdk.commands.bcs.io.SetAllChannelValuesCommand.SetAllChannelValuesCommand(), com.neuronrobotics.sdk.commands.bcs.io.setmode.SetChannelModeCommand.SetChannelModeCommand(), com.neuronrobotics.sdk.commands.bcs.io.SetChannelValueCommand.SetChannelValueCommand(), and com.neuronrobotics.sdk.commands.bcs.io.SetUARTBaudrateCommand.SetUARTBaudrateCommand().
◆ setNamespaceIndex()
| void com.neuronrobotics.sdk.common.BowlerAbstractCommand.setNamespaceIndex | ( | int | namespaceIndex | ) |
Sets the namespace index.
- Parameters
-
namespaceIndex the new namespace index
Definition at line 253 of file BowlerAbstractCommand.java.
References com.neuronrobotics.sdk.common.BowlerAbstractCommand.namespaceIndex.
Referenced by com.neuronrobotics.sdk.common.RpcEncapsulation.getCommand().
◆ setOpCode()
| void com.neuronrobotics.sdk.common.BowlerAbstractCommand.setOpCode | ( | String | opCode | ) |
Set the operation code string. To conform to the Bowler standard, the string should be 4 characters.
- Parameters
-
opCode the RPC operation code to be implemented.
Definition at line 71 of file BowlerAbstractCommand.java.
References com.neuronrobotics.sdk.common.BowlerAbstractCommand.opCode.
Referenced by com.neuronrobotics.sdk.commands.bcs.io.AsyncCommand.AsyncCommand(), com.neuronrobotics.sdk.common.device.server.bcs.rpc.BcsRpcArgsCommand.BcsRpcArgsCommand(), com.neuronrobotics.sdk.common.device.server.bcs.rpc.BcsRpcCommand.BcsRpcCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bowlercam.BlobCommand.BlobCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.BootloaderIDCommand.BootloaderIDCommand(), com.neuronrobotics.sdk.commands.cartesian.CancelPrintCommand.CancelPrintCommand(), com.neuronrobotics.sdk.commands.bcs.io.ConfigAsyncCommand.ConfigAsyncCommand(), com.neuronrobotics.sdk.commands.bcs.pid.DyPID.ConfigureDynamicPIDCommand.ConfigureDynamicPIDCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ConfigurePDVelocityCommand.ConfigurePDVelocityCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ConfigurePIDCommand.ConfigurePIDCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ControlAllPIDCommand.ControlAllPIDCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ControlPIDCommand.ControlPIDCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.EraseFlashCommand.EraseFlashCommand(), com.neuronrobotics.sdk.commands.bcs.core.ErrorCommand.ErrorCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.dyio.GetAllChannelValuesCommand.GetAllChannelValuesCommand(), com.neuronrobotics.sdk.commands.bcs.io.GetChannelModeCommand.GetChannelModeCommand(), com.neuronrobotics.sdk.commands.bcs.io.GetChannelModeListCommand.GetChannelModeListCommand(), com.neuronrobotics.sdk.common.RpcEncapsulation.getCommand(), com.neuronrobotics.sdk.commands.bcs.io.GetDyIOChannelCountCommand.GetDyIOChannelCountCommand(), com.neuronrobotics.sdk.commands.bcs.pid.GetPIDChannelCountCommand.GetPIDChannelCountCommand(), com.neuronrobotics.sdk.commands.bcs.io.GetValueCommand.GetValueCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bowlercam.ImageCommand.ImageCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bowlercam.ImageURLCommand.ImageURLCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.dyio.InfoFirmwareRevisionCommand.InfoFirmwareRevisionCommand(), com.neuronrobotics.sdk.commands.bcs.pid.KillAllPIDCommand.KillAllPIDCommand(), com.neuronrobotics.sdk.commands.cartesian.LinearInterpolationCommand.LinearInterpolationCommand(), com.neuronrobotics.sdk.commands.bcs.core.NamespaceCommand.NamespaceCommand(), com.neuronrobotics.sdk.commands.bcs.pid.PDVelocityCommand.PDVelocityCommand(), com.neuronrobotics.sdk.commands.bcs.core.PingCommand.PingCommand(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.PingCommand.PingCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.dyio.PowerCommand.PowerCommand(), com.neuronrobotics.sdk.dyio.peripherals.ServoChannel.powerOverridePacket.powerOverridePacket(), com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.ProgramSectionCommand.ProgramSectionCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.dyio.ProvisionCommand.ProvisionCommand(), com.neuronrobotics.sdk.commands.bcs.core.ReadyCommand.ReadyCommand(), com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.ResetChipCommand.ResetChipCommand(), com.neuronrobotics.sdk.commands.bcs.pid.ResetPIDCommand.ResetPIDCommand(), com.neuronrobotics.sdk.commands.bcs.core.RpcArgumentsCommand.RpcArgumentsCommand(), com.neuronrobotics.sdk.commands.bcs.core.RpcCommand.RpcCommand(), com.neuronrobotics.sdk.commands.bcs.safe.SafeModeCommand.SafeModeCommand(), com.neuronrobotics.sdk.commands.bcs.io.SetAllChannelValuesCommand.SetAllChannelValuesCommand(), com.neuronrobotics.sdk.commands.bcs.io.setmode.SetChannelModeCommand.SetChannelModeCommand(), com.neuronrobotics.sdk.commands.bcs.io.SetChannelValueCommand.SetChannelValueCommand(), and com.neuronrobotics.sdk.commands.bcs.io.SetUARTBaudrateCommand.SetUARTBaudrateCommand().
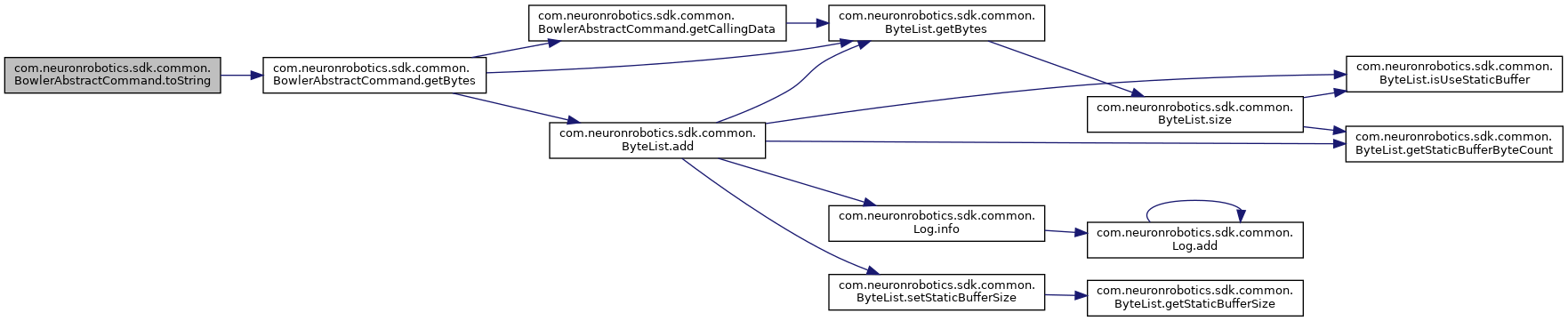
◆ toString()
| String com.neuronrobotics.sdk.common.BowlerAbstractCommand.toString | ( | ) |
Definition at line 218 of file BowlerAbstractCommand.java.
References com.neuronrobotics.sdk.common.BowlerAbstractCommand.getBytes().
◆ validate()
| BowlerDatagram com.neuronrobotics.sdk.common.BowlerAbstractCommand.validate | ( | BowlerDatagram | data | ) | throws InvalidResponseException |
Determine if the return response was successful; throw an InvalidResponseExpection otherwise. Commands with more complicated validation should override this method and provide more specific checking.
- Parameters
-
data the data
- Returns
- the incoming response
- Exceptions
-
InvalidResponseException the invalid response exception
Reimplemented in com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.ProgramSectionCommand, com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.EraseFlashCommand, com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.BootloaderIDCommand, com.neuronrobotics.sdk.commands.bcs.io.SetUARTBaudrateCommand, com.neuronrobotics.sdk.commands.bcs.io.setmode.SetChannelModeCommand, com.neuronrobotics.sdk.commands.bcs.io.SetChannelValueCommand, com.neuronrobotics.sdk.commands.bcs.io.GetValueCommand, com.neuronrobotics.sdk.commands.bcs.io.GetChannelModeCommand, and com.neuronrobotics.sdk.commands.bcs.core.NamespaceCommand.
Definition at line 123 of file BowlerAbstractCommand.java.
References com.neuronrobotics.sdk.common.BowlerAbstractCommand.data, and com.neuronrobotics.sdk.common.ByteList.getByte().

Member Data Documentation
◆ data
The data.
Definition at line 51 of file BowlerAbstractCommand.java.
Referenced by com.neuronrobotics.sdk.common.BowlerAbstractCommand.getCallingData(), com.neuronrobotics.sdk.common.BowlerAbstractCommand.getCallingDataStorage(), com.neuronrobotics.sdk.commands.bcs.io.SetChannelValueCommand.SetChannelValueCommand(), com.neuronrobotics.sdk.common.BowlerAbstractCommand.setData(), com.neuronrobotics.sdk.commands.bcs.core.NamespaceCommand.validate(), com.neuronrobotics.sdk.commands.bcs.io.GetChannelModeCommand.validate(), com.neuronrobotics.sdk.commands.bcs.io.GetValueCommand.validate(), com.neuronrobotics.sdk.commands.bcs.io.SetChannelValueCommand.validate(), com.neuronrobotics.sdk.commands.bcs.io.setmode.SetChannelModeCommand.validate(), com.neuronrobotics.sdk.commands.bcs.io.SetUARTBaudrateCommand.validate(), com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.BootloaderIDCommand.validate(), com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.EraseFlashCommand.validate(), com.neuronrobotics.sdk.commands.neuronrobotics.bootloader.ProgramSectionCommand.validate(), and com.neuronrobotics.sdk.common.BowlerAbstractCommand.validate().
◆ method
|
private |
The method.
Definition at line 48 of file BowlerAbstractCommand.java.
Referenced by com.neuronrobotics.sdk.common.BowlerAbstractCommand.getMethod(), and com.neuronrobotics.sdk.common.BowlerAbstractCommand.setMethod().
◆ namespaceIndex
|
private |
The namespace index.
Definition at line 54 of file BowlerAbstractCommand.java.
Referenced by com.neuronrobotics.sdk.common.BowlerAbstractCommand.getNamespaceIndex(), and com.neuronrobotics.sdk.common.BowlerAbstractCommand.setNamespaceIndex().
◆ opCode
|
private |
The op code.
Definition at line 45 of file BowlerAbstractCommand.java.
Referenced by com.neuronrobotics.sdk.common.BowlerAbstractCommand.getBytes(), com.neuronrobotics.sdk.common.BowlerAbstractCommand.getLength(), com.neuronrobotics.sdk.common.BowlerAbstractCommand.getOpCode(), and com.neuronrobotics.sdk.common.BowlerAbstractCommand.setOpCode().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/common/BowlerAbstractCommand.java