
 Public Member Functions inherited from
Public Member Functions inherited from Private Member Functions | |
| double[] | compute (DHParameterKinematics ldh, HashMap< String, double[]> IKvalues, TransformNR taskSpaceTransform) throws Exception |
| DHParameterKinematics | findReferencedLimb (String refLimbName) |
Private Attributes | |
| ArrayList< DHParameterKinematics > | constituantLimbs = new ArrayList<DHParameterKinematics>() |
| HashMap< DHParameterKinematics, TransformNR > | tipOffset = new HashMap<DHParameterKinematics, TransformNR>() |
| HashMap< DHParameterKinematics, String > | tipOffsetRelativeToName = new HashMap<>() |
| HashMap< DHParameterKinematics, Integer > | tipOffsetRelativeIndex = new HashMap<>() |
| String[] | toolEngine |
| String | name |
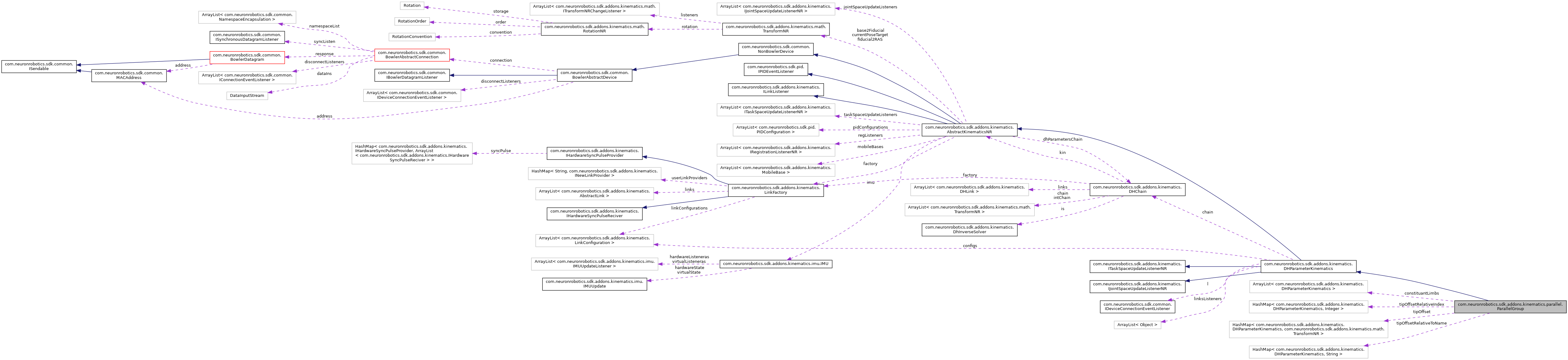
Detailed Description
Definition at line 14 of file ParallelGroup.java.
Constructor & Destructor Documentation
◆ ParallelGroup()
| com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.ParallelGroup | ( | String | name | ) |
Definition at line 38 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.name.
Member Function Documentation
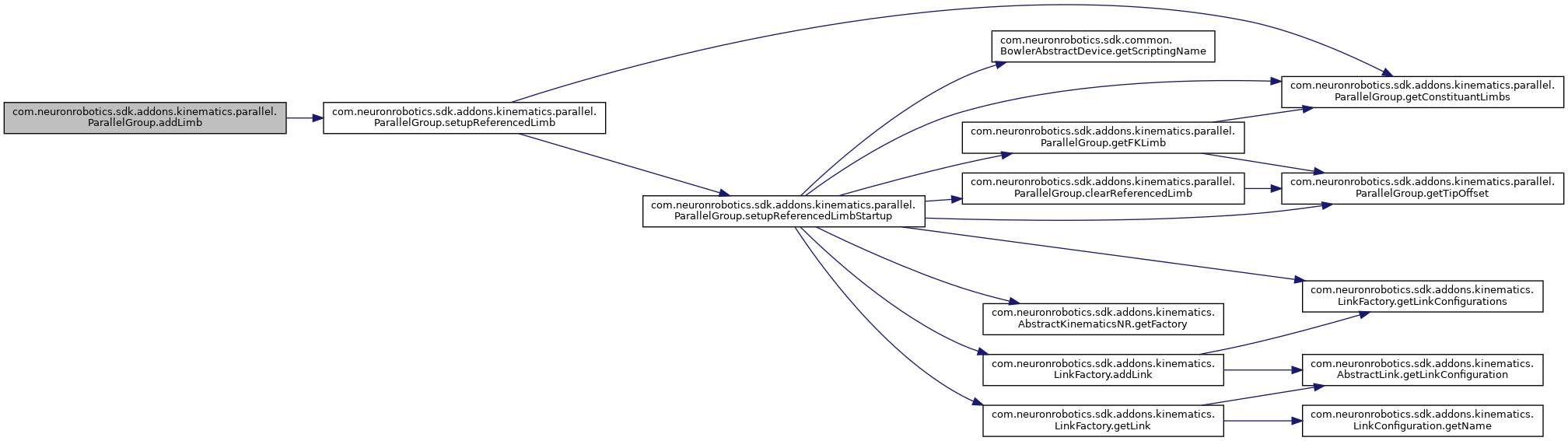
◆ addLimb()
| void com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.addLimb | ( | DHParameterKinematics | limb, |
| TransformNR | tip, | ||
| String | name, | ||
| int | index | ||
| ) |
Definition at line 44 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.name, and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimb().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.addLimbToParallel().
◆ calcHome()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.calcHome | ( | ) |
Calc home.
- Returns
- the transform nr
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Definition at line 66 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.calcHome(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getFKLimb().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.initializeParalellGroups().

◆ clearReferencedLimb()
| void com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.clearReferencedLimb | ( | DHParameterKinematics | limb | ) |
Definition at line 126 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffset(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffsetRelativeIndex, and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffsetRelativeToName.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.removeLimb(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup().

◆ close()
| void com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.close | ( | ) |
Definition at line 345 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.constituantLimbs, com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffset, and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffsetRelativeToName.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.disconnectDevice(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.shutDownParallel().
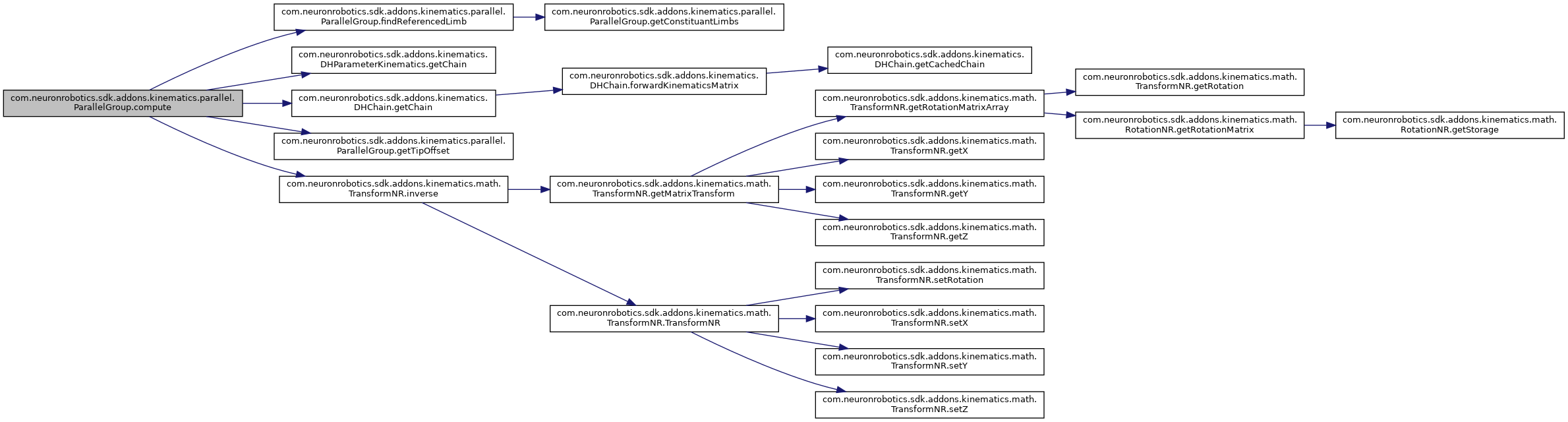
◆ compute()
|
private |
Definition at line 148 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.findReferencedLimb(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChain(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getChain(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffset(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.inverse(), com.neuronrobotics.sdk.common.BowlerAbstractDevice.scriptingName, com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffsetRelativeIndex, and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffsetRelativeToName.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.inverseKinematics(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.printError().
◆ connectDevice()
| boolean com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.connectDevice | ( | ) |
Connect device.
- Returns
- true, if successful
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.
Definition at line 143 of file ParallelGroup.java.
◆ disconnectDevice()
| void com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.disconnectDevice | ( | ) |
This method tells the connection object to disconnect its pipes and close out the connection. Once this is called, it is safe to remove your device.
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.
Definition at line 133 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.close(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs().

◆ findReferencedLimb()
|
private |
Definition at line 176 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs().
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.compute().

◆ forwardKinematics()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.forwardKinematics | ( | double[] | jointSpaceVector | ) |
Forward kinematics.
- Parameters
-
jointSpaceVector the joint space vector
- Returns
- 6x1 vector in task space, unit in mm,radians [x,y,z,rotx,rotY,rotZ]
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.
Definition at line 267 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getFKLimb().

◆ getConstituantLimbs()
| ArrayList<DHParameterKinematics> com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs | ( | ) |
Definition at line 295 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.constituantLimbs.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.disconnectDevice(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.findReferencedLimb(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.forwardKinematics(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getFKLimb(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.initializeParalellGroups(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.inverseKinematics(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.main(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.makeLimbTag(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.printError(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.removeLimFromParallel(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimb(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup().
◆ getCurrentJointSpaceVector()
| double [] com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getCurrentJointSpaceVector | ( | DHParameterKinematics | k | ) |
Definition at line 201 of file ParallelGroup.java.
◆ getFKLimb()
| DHParameterKinematics com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getFKLimb | ( | ) |
Definition at line 50 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffset().
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.calcHome(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.forwardKinematics(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup().

◆ getGitCadToolEngine()
| String [] com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getGitCadToolEngine | ( | ) |
Gets the cad engine.
- Returns
- the cad engine
Definition at line 281 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.toolEngine.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml().
◆ getNameOfParallelGroup()
| String com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getNameOfParallelGroup | ( | ) |
Definition at line 341 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.name.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.initializeParalellGroups(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.removeLimFromParallel(), and com.neuronrobotics.sdk.addons.kinematics.MobileBase.shutDownParallel().
◆ getTipOffset() [1/2]
| HashMap<DHParameterKinematics, TransformNR> com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffset | ( | ) |
Definition at line 303 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffset.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.clearReferencedLimb(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.compute(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getFKLimb(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffsetFromThisLinkInLimb(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.main(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.makeLimbTag(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup().
◆ getTipOffset() [2/2]
| TransformNR com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffset | ( | DHParameterKinematics | l | ) |
Definition at line 307 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffset.
◆ getTipOffsetFromThisLinkInLimb()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffsetFromThisLinkInLimb | ( | DHParameterKinematics | control, |
| int | index | ||
| ) |
Definition at line 25 of file ParallelGroup.java.
References com.neuronrobotics.sdk.common.BowlerAbstractDevice.getScriptingName(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffset(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.name, com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffsetRelativeIndex, and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffsetRelativeToName.

◆ getTipOffsetRelativeIndex()
| int com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffsetRelativeIndex | ( | DHParameterKinematics | l | ) |
Definition at line 319 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffsetRelativeIndex.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.makeLimbTag().
◆ getTipOffsetRelativeName()
| String com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffsetRelativeName | ( | DHParameterKinematics | l | ) |
Definition at line 315 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffsetRelativeToName.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.makeLimbTag().
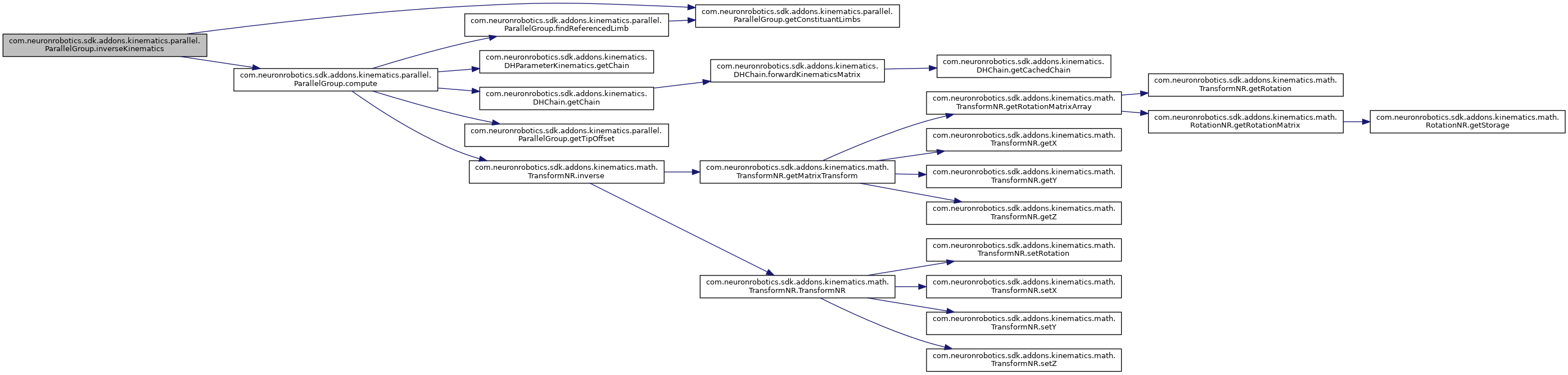
◆ inverseKinematics()
| double [] com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.inverseKinematics | ( | TransformNR | taskSpaceTransform | ) | throws Exception |
Inverse kinematics.
- Parameters
-
taskSpaceTransform the task space transform
- Returns
- Nx1 vector in task space, in mm where N is number of links
- Exceptions
-
Exception the exception
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.
Definition at line 206 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.compute(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs().
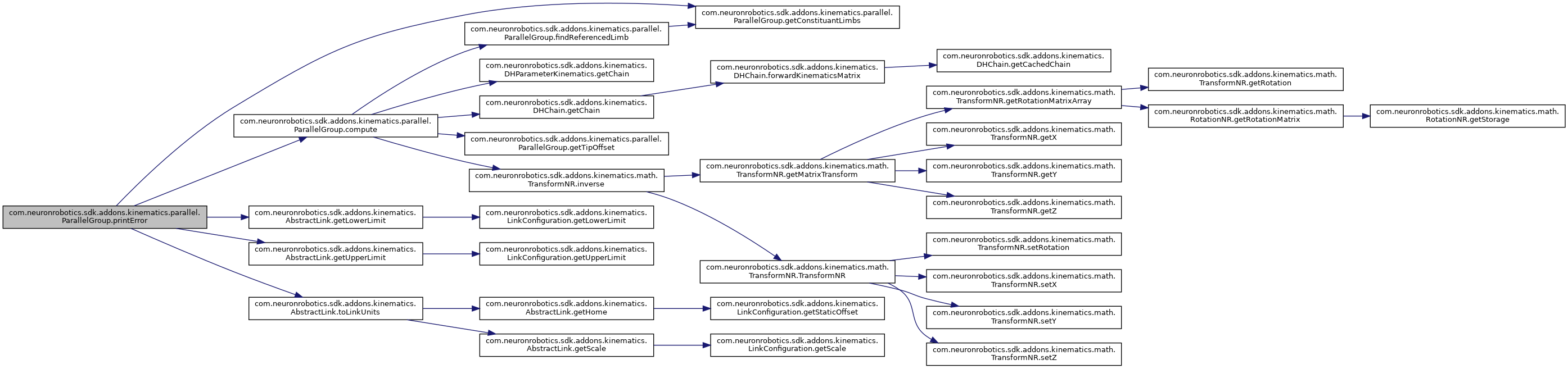
◆ printError() [1/2]
| void com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.printError | ( | TransformNR | taskSpaceTransform | ) | throws Exception |
Definition at line 228 of file ParallelGroup.java.
◆ printError() [2/2]
| void com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.printError | ( | TransformNR | taskSpaceTransform, |
| Consumer< String > | printer | ||
| ) | throws Exception |
Definition at line 233 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.compute(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getUpperLimit(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.toLinkUnits().
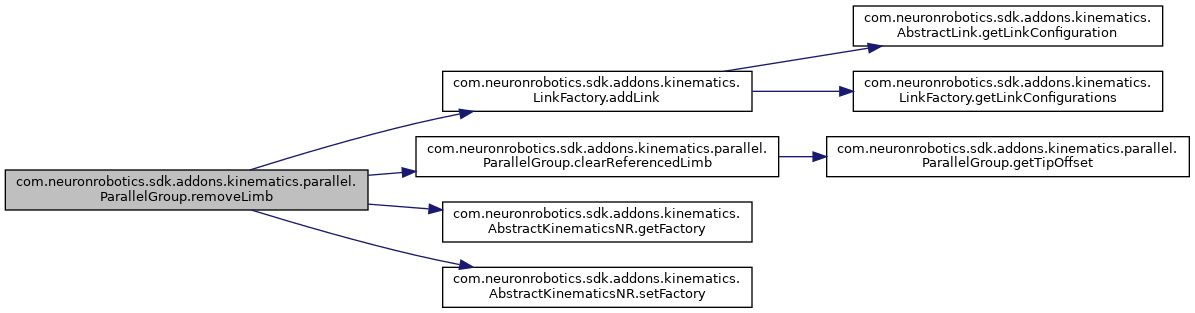
◆ removeLimb()
| void com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.removeLimb | ( | DHParameterKinematics | limb | ) |
Definition at line 327 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.addLink(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.clearReferencedLimb(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.constituantLimbs, com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFactory(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setFactory().
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.removeLimFromParallel().
◆ setCurrentPoseTarget()
| void com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setCurrentPoseTarget | ( | TransformNR | currentPoseTarget | ) |
Sets the current pose target.
- Parameters
-
currentPoseTarget the new current pose target
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.
Definition at line 195 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkTaskSpaceTransform(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.currentPoseTarget.

◆ setGitCadToolEngine()
| void com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setGitCadToolEngine | ( | String[] | cadEngine | ) |
Sets the cad engine.
- Parameters
-
cadEngine the new cad engine
Definition at line 290 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.cadEngine.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadConfigs().
◆ setTipOffset() [1/2]
| void com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setTipOffset | ( | DHParameterKinematics | l, |
| TransformNR | n | ||
| ) |
Definition at line 311 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffset.
◆ setTipOffset() [2/2]
| void com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setTipOffset | ( | HashMap< DHParameterKinematics, TransformNR > | tipOffset | ) |
Definition at line 323 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffset.
◆ setupReferencedLimb()
| void com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimb | ( | DHParameterKinematics | limb, |
| TransformNR | tip, | ||
| String | name, | ||
| int | index | ||
| ) |
Definition at line 70 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.name, and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup().
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.addLimb().
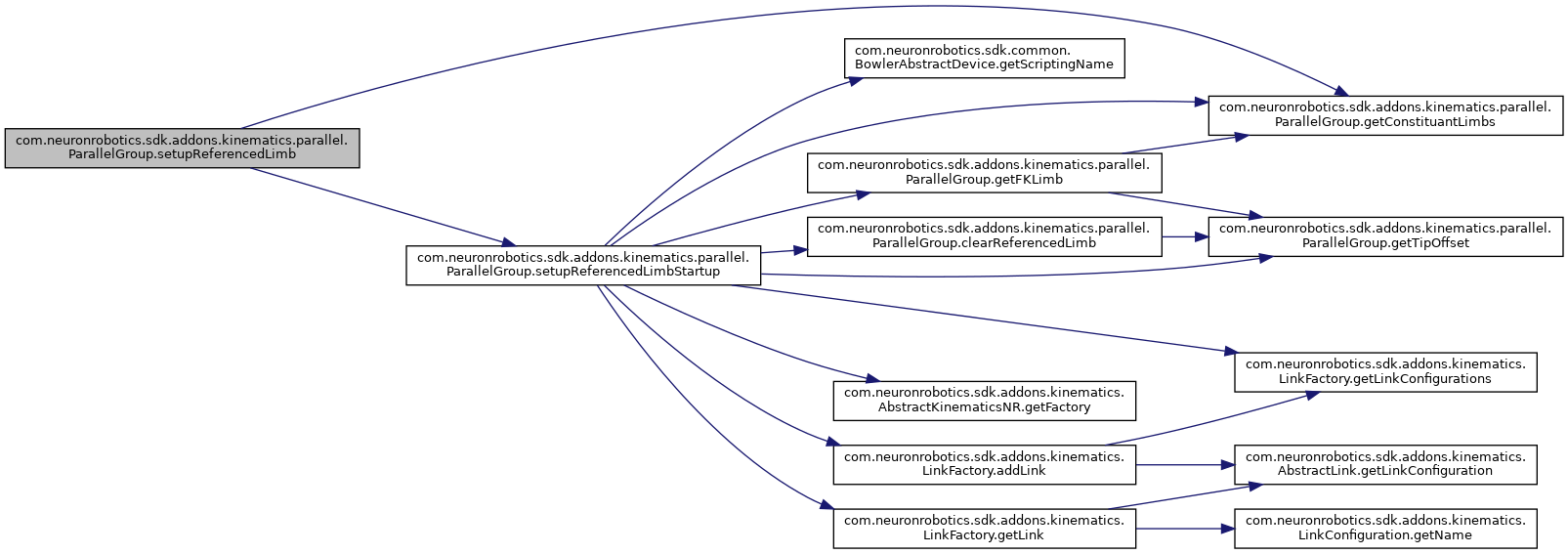
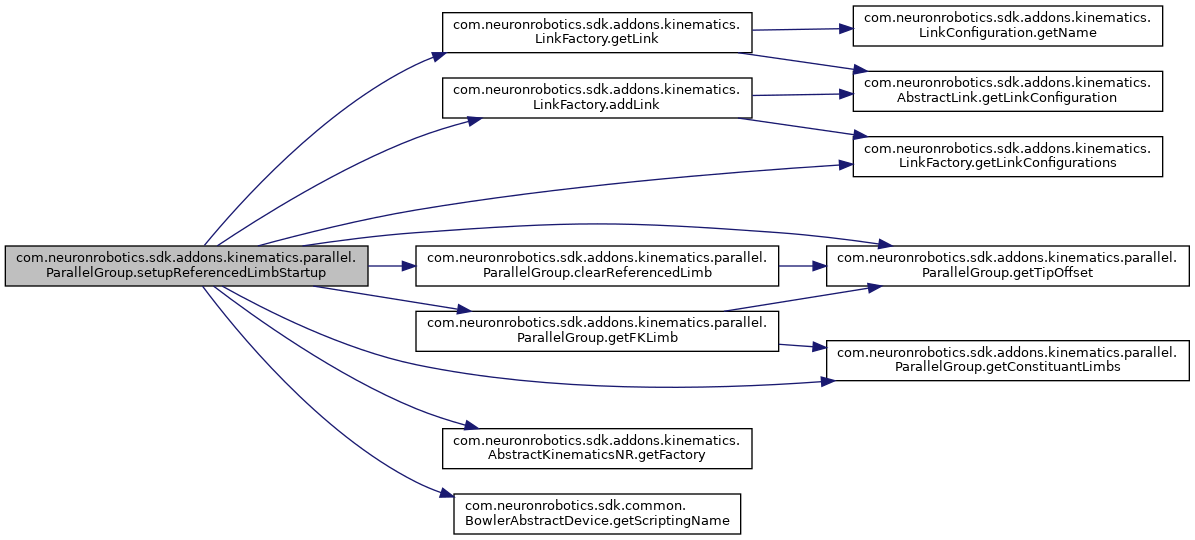
◆ setupReferencedLimbStartup()
| void com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup | ( | DHParameterKinematics | limb, |
| TransformNR | tip, | ||
| String | name, | ||
| int | index | ||
| ) |
Definition at line 80 of file ParallelGroup.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkFactory.addLink(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.clearReferencedLimb(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFactory(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getFKLimb(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLink(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkConfigurations(), com.neuronrobotics.sdk.common.BowlerAbstractDevice.getScriptingName(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffset(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.name, com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffsetRelativeIndex, and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.tipOffsetRelativeToName.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.loadLimb(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimb().
Member Data Documentation
◆ constituantLimbs
|
private |
Definition at line 16 of file ParallelGroup.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.close(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getConstituantLimbs(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.removeLimb().
◆ name
|
private |
Definition at line 23 of file ParallelGroup.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.addLimb(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getNameOfParallelGroup(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffsetFromThisLinkInLimb(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.ParallelGroup(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimb(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup().
◆ tipOffset
|
private |
Definition at line 17 of file ParallelGroup.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.close(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffset(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setTipOffset().
◆ tipOffsetRelativeIndex
|
private |
Definition at line 19 of file ParallelGroup.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.clearReferencedLimb(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.compute(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffsetFromThisLinkInLimb(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffsetRelativeIndex(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup().
◆ tipOffsetRelativeToName
|
private |
Definition at line 18 of file ParallelGroup.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.clearReferencedLimb(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.close(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.compute(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffsetFromThisLinkInLimb(), com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getTipOffsetRelativeName(), and com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.setupReferencedLimbStartup().
◆ toolEngine
|
private |
The cad engine.
Definition at line 21 of file ParallelGroup.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.getGitCadToolEngine().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/parallel/ParallelGroup.java