Public Member Functions | |
| DHChain (AbstractKinematicsNR kin) | |
| void | addLink (DHLink link) |
| void | removeLink (DHLink link) |
| double[] | inverseKinematics (TransformNR target, double[] jointSpaceVector) throws Exception |
| TransformNR | forwardKinematics (double[] jointSpaceVector) |
| TransformNR | forwardKinematics (double[] jointSpaceVector, boolean store) |
| Matrix | forwardKinematicsMatrix (double[] jointSpaceVector, boolean store) |
| Matrix | forwardKinematicsMatrix (double[] jointSpaceVector, ArrayList< TransformNR > chainToLoad) |
| void | setChain (ArrayList< TransformNR > chain) |
| ArrayList< TransformNR > | getChain (double[] jointSpaceVector) |
| ArrayList< TransformNR > | getCachedChain () |
| double[] | getUpperLimits () |
| double[] | getlowerLimits () |
| void | setLinks (ArrayList< DHLink > links) |
| ArrayList< DHLink > | getLinks () |
| String | toString () |
| DhInverseSolver | getInverseSolver () |
| void | setInverseSolver (DhInverseSolver is) |
| LinkFactory | getFactory () |
| void | setFactory (LinkFactory factory) |
Public Attributes | |
| AbstractKinematicsNR | kin |
Private Member Functions | |
| double[] | crossProduct (double[] a, double[] b) |
| TransformNR | forwardOffset (TransformNR transformNR) |
Private Attributes | |
| ArrayList< DHLink > | links = new ArrayList<DHLink>() |
| ArrayList< TransformNR > | chain = new ArrayList<TransformNR>() |
| ArrayList< TransformNR > | intChain = new ArrayList<TransformNR>() |
| double[] | upperLimits |
| double[] | lowerLimits |
| boolean | debug =false |
| DhInverseSolver | is |
| LinkFactory | factory |
Detailed Description
The Class DHChain.
Definition at line 22 of file DHChain.java.
Constructor & Destructor Documentation
◆ DHChain()
| com.neuronrobotics.sdk.addons.kinematics.DHChain.DHChain | ( | AbstractKinematicsNR | kin | ) |
Instantiates a new DH chain.
- Parameters
-
kin the kin
Definition at line 57 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.kin.
Member Function Documentation
◆ addLink()
| void com.neuronrobotics.sdk.addons.kinematics.DHChain.addLink | ( | DHLink | link | ) |
Adds the link.
- Parameters
-
link the link
Definition at line 67 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink().

◆ crossProduct()
|
private |
Cross product.
- Parameters
-
a the a b the b
- Returns
- the double[]
Definition at line 164 of file DHChain.java.
◆ forwardKinematics() [1/2]
| TransformNR com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematics | ( | double[] | jointSpaceVector | ) |
Forward kinematics.
- Parameters
-
jointSpaceVector the joint space vector
- Returns
- the transform nr
Definition at line 140 of file DHChain.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.fk(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.forwardKinematics(), com.neuronrobotics.sdk.addons.kinematics.ComputedGeometricModel.inverseKinematics(), com.neuronrobotics.sdk.addons.kinematics.GradiantDecent.inverseKinematics(), com.neuronrobotics.sdk.addons.kinematics.GradiantDecentNode.stepLin(), and com.neuronrobotics.sdk.addons.kinematics.GradiantDecentNode.stepOrent().
◆ forwardKinematics() [2/2]
| TransformNR com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematics | ( | double[] | jointSpaceVector, |
| boolean | store | ||
| ) |
Forward kinematics.
- Parameters
-
jointSpaceVector the joint space vector store the store
- Returns
- the transform nr
Definition at line 151 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematicsMatrix().

◆ forwardKinematicsMatrix() [1/2]
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematicsMatrix | ( | double[] | jointSpaceVector, |
| ArrayList< TransformNR > | chainToLoad | ||
| ) |
Definition at line 184 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardOffset(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getFactory(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkConfigurations(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getMatrixTransform(), com.neuronrobotics.sdk.addons.kinematics.DHChain.intChain, and com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isPrismatic().

◆ forwardKinematicsMatrix() [2/2]
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematicsMatrix | ( | double[] | jointSpaceVector, |
| boolean | store | ||
| ) |
Forward kinematics matrix.
- Parameters
-
jointSpaceVector the joint space vector store the store
- Returns
- the matrix
Definition at line 181 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.getCachedChain().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematics(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getChain(), and com.neuronrobotics.sdk.addons.kinematics.ik.DeltaIKModel.inverseKinematics6dof().

◆ forwardOffset()
|
private |
Forward offset.
- Parameters
-
transformNR the transform nr
- Returns
- the transform nr
Definition at line 239 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.forwardOffset(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.kin.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematicsMatrix().

◆ getCachedChain()
| ArrayList<TransformNR> com.neuronrobotics.sdk.addons.kinematics.DHChain.getCachedChain | ( | ) |
Gets the cached chain.
- Returns
- the cached chain
Definition at line 273 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.chain.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematicsMatrix(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getLinkTip(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.setChain().
◆ getChain()
| ArrayList<TransformNR> com.neuronrobotics.sdk.addons.kinematics.DHChain.getChain | ( | double[] | jointSpaceVector | ) |
Gets the chain.
- Parameters
-
jointSpaceVector the joint space vector
- Returns
- the chain
Definition at line 262 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematicsMatrix().
Referenced by com.neuronrobotics.sdk.addons.kinematics.parallel.ParallelGroup.compute(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getChainTransformations(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.linkCoM(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setGlobalToFiducialTransform(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.updateCadLocations(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateLimb().

◆ getFactory()
| LinkFactory com.neuronrobotics.sdk.addons.kinematics.DHChain.getFactory | ( | ) |
Gets the factory.
- Returns
- the factory
Definition at line 472 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.factory.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematicsMatrix().
◆ getInverseSolver()
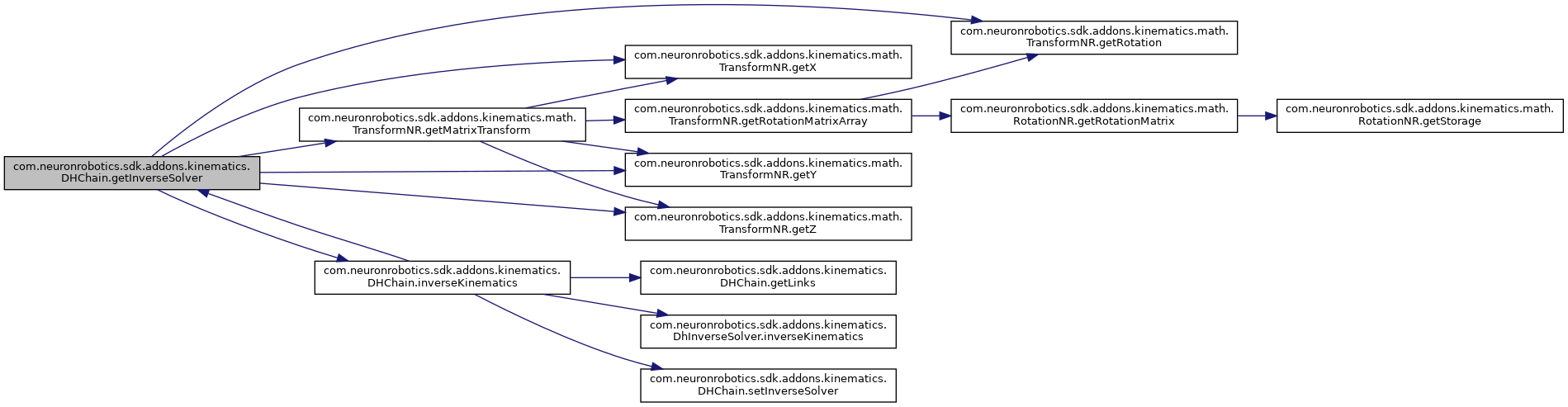
| DhInverseSolver com.neuronrobotics.sdk.addons.kinematics.DHChain.getInverseSolver | ( | ) |
Gets the inverse solver.
- Returns
- the inverse solver
Definition at line 334 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.chain, com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getMatrixTransform(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getRotation(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getX(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getY(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getZ(), com.neuronrobotics.sdk.addons.kinematics.DHChain.inverseKinematics(), com.neuronrobotics.sdk.addons.kinematics.DHChain.is, and com.neuronrobotics.sdk.addons.kinematics.DHChain.links.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getInverseSolver(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.inverseKinematics().
◆ getLinks()
| ArrayList<DHLink> com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks | ( | ) |
Gets the links.
- Returns
- the links
Definition at line 313 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.links.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.addLink(), com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematicsMatrix(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDH_Alpha(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDH_D(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDH_R(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDH_Theta(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhLink(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getEmbedableXml(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getJacobian(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getLinkObjectManipulator(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getListener(), com.neuronrobotics.sdk.addons.kinematics.DHChain.inverseKinematics(), com.neuronrobotics.sdk.addons.kinematics.ComputedGeometricModel.inverseKinematics(), com.neuronrobotics.sdk.addons.kinematics.GradiantDecent.inverseKinematics(), com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.inverseKinematics(), com.neuronrobotics.sdk.addons.kinematics.ik.DeltaIKModel.inverseKinematics6dof(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.onJointSpaceUpdate(), com.neuronrobotics.sdk.addons.kinematics.DHChain.removeLink(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.removeLink(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setChain(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDH_Alpha(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDH_D(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDH_R(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setDH_Theta(), com.neuronrobotics.sdk.addons.kinematics.DHChain.toString(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateLimb().
◆ getlowerLimits()
| double [] com.neuronrobotics.sdk.addons.kinematics.DHChain.getlowerLimits | ( | ) |
Gets the lower limits.
- Returns
- the lower limits
Definition at line 294 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.lowerLimits.
Referenced by com.neuronrobotics.sdk.addons.kinematics.GradiantDecent.inverseKinematics(), and com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.SearchTreeSolver().
◆ getUpperLimits()
| double [] com.neuronrobotics.sdk.addons.kinematics.DHChain.getUpperLimits | ( | ) |
Gets the upper limits.
- Returns
- the upper limits
Definition at line 284 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.upperLimits.
Referenced by com.neuronrobotics.sdk.addons.kinematics.GradiantDecent.inverseKinematics(), and com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.SearchTreeSolver().
◆ inverseKinematics()
| double [] com.neuronrobotics.sdk.addons.kinematics.DHChain.inverseKinematics | ( | TransformNR | target, |
| double[] | jointSpaceVector | ||
| ) | throws Exception |
Inverse kinematics.
- Parameters
-
target the target jointSpaceVector the joint space vector
- Returns
- the double[]
- Exceptions
-
Exception the exception
Definition at line 113 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.debug, com.neuronrobotics.sdk.addons.kinematics.DHChain.getInverseSolver(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks(), com.neuronrobotics.sdk.addons.kinematics.DhInverseSolver.inverseKinematics(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.setInverseSolver().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.getInverseSolver(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.inverseKinematics().

◆ removeLink()
| void com.neuronrobotics.sdk.addons.kinematics.DHChain.removeLink | ( | DHLink | link | ) |
Removes the link.
- Parameters
-
link the link
Definition at line 78 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().

◆ setChain()
| void com.neuronrobotics.sdk.addons.kinematics.DHChain.setChain | ( | ArrayList< TransformNR > | chain | ) |
Sets the chain.
- Parameters
-
chain the new chain
Definition at line 248 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.chain, and com.neuronrobotics.sdk.addons.kinematics.DHChain.getCachedChain().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setGlobalToFiducialTransform().

◆ setFactory()
| void com.neuronrobotics.sdk.addons.kinematics.DHChain.setFactory | ( | LinkFactory | factory | ) |
Sets the factory.
- Parameters
-
factory the new factory
Definition at line 481 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.factory, com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLowerLimits(), com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getUpperLimits(), com.neuronrobotics.sdk.addons.kinematics.DHChain.lowerLimits, and com.neuronrobotics.sdk.addons.kinematics.DHChain.upperLimits.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink().

◆ setInverseSolver()
| void com.neuronrobotics.sdk.addons.kinematics.DHChain.setInverseSolver | ( | DhInverseSolver | is | ) |
Sets the inverse solver.
- Parameters
-
is the new inverse solver
Definition at line 463 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.is.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.inverseKinematics(), and com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.setInverseSolver().
◆ setLinks()
| void com.neuronrobotics.sdk.addons.kinematics.DHChain.setLinks | ( | ArrayList< DHLink > | links | ) |
Sets the links.
- Parameters
-
links the new links
Definition at line 304 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.links.
◆ toString()
| String com.neuronrobotics.sdk.addons.kinematics.DHChain.toString | ( | ) |
Definition at line 320 of file DHChain.java.
References com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks().

Member Data Documentation
◆ chain
|
private |
The chain.
Definition at line 28 of file DHChain.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.getCachedChain(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getInverseSolver(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.setChain().
◆ debug
|
private |
The debug.
Definition at line 40 of file DHChain.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.inverseKinematics().
◆ factory
|
private |
The factory.
Definition at line 49 of file DHChain.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.getFactory(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.setFactory().
◆ intChain
|
private |
The int chain.
Definition at line 31 of file DHChain.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardKinematicsMatrix().
◆ is
|
private |
The is.
Definition at line 43 of file DHChain.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.getInverseSolver(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.setInverseSolver().
◆ kin
| AbstractKinematicsNR com.neuronrobotics.sdk.addons.kinematics.DHChain.kin |
The kin.
Definition at line 46 of file DHChain.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.DHChain(), com.neuronrobotics.sdk.addons.kinematics.DHChain.forwardOffset(), com.neuronrobotics.sdk.addons.kinematics.ik.DeltaIKModel.inverseKinematics6dof(), and com.neuronrobotics.sdk.addons.kinematics.WristNormalizer.normalize().
◆ links
|
private |
The links.
Definition at line 25 of file DHChain.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.getInverseSolver(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.setLinks().
◆ lowerLimits
|
private |
The lower limits.
Definition at line 37 of file DHChain.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.getlowerLimits(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.setFactory().
◆ upperLimits
|
private |
The upper limits.
Definition at line 34 of file DHChain.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHChain.getUpperLimits(), and com.neuronrobotics.sdk.addons.kinematics.DHChain.setFactory().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/DHChain.java