|
| | GenericKinematicsModelNR (InputStream configFile, GenericPIDDevice device) |
| |
| | GenericKinematicsModelNR () |
| |
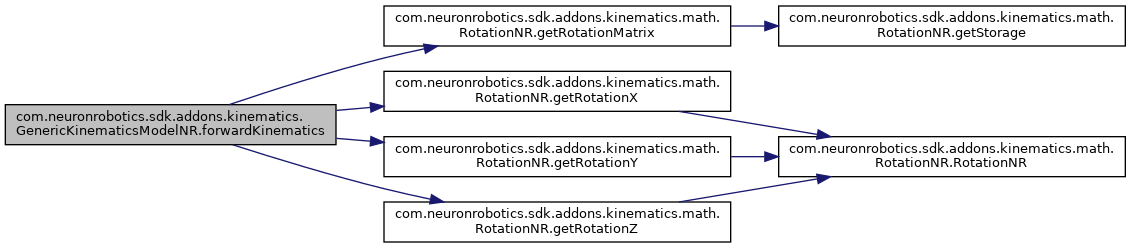
| TransformNR | forwardKinematics (double[] jointSpaceVector) |
| |
| double[] | inverseKinematics (TransformNR cartesianSpaceVector) throws Exception |
| |
| void | disconnectDevice () |
| |
| boolean | connectDevice () |
| |
| Object | getRootListener () |
| |
| void | setRootListener (Object listener) |
| |
| ArrayList< String > | getNamespacesImp () |
| |
| void | disconnectDeviceImp () |
| |
| boolean | connectDeviceImp () |
| |
| | AbstractKinematicsNR () |
| |
| | AbstractKinematicsNR (InputStream configFile, LinkFactory f) |
| |
| | AbstractKinematicsNR (Element doc, LinkFactory f) |
| |
| String | getXml () |
| |
| LinkConfiguration | getLinkConfiguration (int linkIndex) |
| |
| ArrayList< LinkConfiguration > | getLinkConfigurations () |
| |
| PIDConfiguration | getLinkCurrentConfiguration (int chan) |
| |
| void | setLinkCurrentConfiguration (int chan, PIDConfiguration c) |
| |
| AbstractLink | getAbstractLink (int index) |
| |
| int | getNumberOfLinks () |
| |
| TransformNR | getCurrentTaskSpaceTransform () |
| |
| double | readLinkValue (int index) |
| |
| double | readLinkTarget (int index) |
| |
| double[] | getCurrentJointSpaceVector () |
| |
| double[] | getCurrentJointSpaceTarget () |
| |
| double | getCurrentLinkEngineeringUnits (int linkIndex) |
| |
| double[] | setDesiredTaskSpaceTransform (TransformNR taskSpaceTransform, double seconds) throws Exception |
| |
| boolean | checkTaskSpaceTransform (TransformNR taskSpaceTransform, double seconds) |
| |
| boolean | checkTaskSpaceTransform (TransformNR taskSpaceTransform) |
| |
| double | getBestTime (TransformNR currentTaskSpaceTransform) |
| |
| double | getBestTime (double[] jointSpaceVect) |
| |
| double[] | setDesiredJointSpaceVector (double[] jointSpaceVect, double seconds) throws Exception |
| |
| TransformNR | calcForward (double[] jointSpaceVect) |
| |
| TransformNR | calcHome () |
| |
| void | setDesiredJointAxisValue (int axis, double value, double seconds) throws Exception |
| |
| void | firePoseUpdate () |
| |
| TransformNR | getFiducialToGlobalTransform () |
| |
| void | setRobotToFiducialTransform (TransformNR baseToFiducial) |
| |
| TransformNR | getRobotToFiducialTransform () |
| |
| void | setGlobalToFiducialTransform (TransformNR frameToBase, boolean fireUpdate) |
| |
| void | setGlobalToFiducialTransform (TransformNR frameToBase) |
| |
| TransformNR | inverseOffset (TransformNR t) |
| |
| TransformNR | forwardOffset (TransformNR t) |
| |
| void | addJointSpaceListener (IJointSpaceUpdateListenerNR l) |
| |
| void | removeJointSpaceUpdateListener (IJointSpaceUpdateListenerNR l) |
| |
| void | addRegistrationListener (IRegistrationListenerNR l) |
| |
| void | removeRegestrationUpdateListener (IRegistrationListenerNR l) |
| |
| void | addPoseUpdateListener (ITaskSpaceUpdateListenerNR l) |
| |
| void | removePoseUpdateListener (ITaskSpaceUpdateListenerNR l) |
| |
| void | onLinkPositionUpdate (AbstractLink source, double engineeringUnitsValue) |
| |
| void | onPIDEvent (PIDEvent e) |
| |
| void | onPIDLimitEvent (PIDLimitEvent e) |
| |
| void | onPIDReset (int group, float currentValue) |
| |
| void | homeAllLinks () |
| |
| void | homeLink (int link) |
| |
| void | emergencyStop () |
| |
| ArrayList< PIDConfiguration > | getAxisPidConfiguration () |
| |
| TransformNR | getCurrentPoseTarget () |
| |
| void | setCurrentPoseTarget (TransformNR currentPoseTarget) |
| |
| void | setFactory (LinkFactory factory) |
| |
| LinkFactory | getFactory () |
| |
| void | setNoFlush (boolean noFlush) |
| |
| boolean | isNoFlush () |
| |
| int | getRetryNumberBeforeFail () |
| |
| void | setRetryNumberBeforeFail (int retryNumberBeforeFail) |
| |
| void | onLinkLimit (AbstractLink arg0, PIDLimitEvent arg1) |
| |
| DHChain | getDhParametersChain () |
| |
| void | setDhParametersChain (DHChain dhParametersChain) |
| |
| String[] | getGitDhEngine () |
| |
| void | setGitDhEngine (String[] dhEngine) |
| |
| String[] | getGitCadEngine () |
| |
| void | setGitCadEngine (String[] cadEngine) |
| |
| IMU | getImu () |
| |
| void | boundedLinkValueSet (int index, double value) throws Exception |
| |
| double | boundToLinkLimits (int index, double value) |
| |
| double | linkMass (int linkIndex) |
| |
| double | getMaxEngineeringUnits (int linkIndex) |
| |
| double | getMinEngineeringUnits (int linkIndex) |
| |
| void | setMaxEngineeringUnits (int linkIndex, double maxLimit) |
| |
| void | setMinEngineeringUnits (int linkIndex, double minLimit) |
| |
| String | getElectroMechanicalType (int linkIndex) |
| |
| void | setElectroMechanicalType (int linkIndex, String electroMechanicalType) |
| |
| String | getElectroMechanicalSize (int linkIndex) |
| |
| void | setElectroMechanicalSize (int linkIndex, String electroMechanicalSize) |
| |
| String | getShaftType (int linkIndex) |
| |
| void | setShaftType (int linkIndex, String shaftType) |
| |
| String | getShaftSize (int linkIndex) |
| |
| void | setDeviceMaximumValue (int linkIndex, double max) |
| |
| void | setDeviceMinimumValue (int linkIndex, double min) |
| |
| double | getDeviceMaximumValue (int linkIndex) |
| |
| double | getDeviceMinimumValue (int linkIndex) |
| |
| void | addChangeListener (int linkIndex, ILinkConfigurationChangeListener l) |
| |
| void | removeChangeListener (int linkIndex, ILinkConfigurationChangeListener l) |
| |
| void | clearChangeListener (int linkIndex) |
| |
| void | runRenderWrangler () |
| |
| void | setRenderWrangler (Runnable renderWrangler) |
| |
| TransformNR | getDeltaToTarget (TransformNR target) |
| |
| TransformNR | getTipAlongTrajectory (TransformNR startingPoint, TransformNR deltaToTarget, double unitIncrement) |
| |
| void | asyncInterpolatedMove (TransformNR target, double seconds, InterpolationType type, IOnInterpolationDone listener, double ...conf) |
| |
| InterpolationMoveState | blockingInterpolatedMove (TransformNR target, double seconds, InterpolationType type, double ...conf) |
| |
| boolean | connect () |
| |
| boolean | isAvailable () throws InvalidConnectionException |
| |
| void | disconnect () |
| |
| void | onAsyncResponse (BowlerDatagram data) |
| |
| ArrayList< String > | getNamespaces () |
| |
| void | addConnectionEventListener (final IDeviceConnectionEventListener l) |
| |
| void | removeConnectionEventListener (IDeviceConnectionEventListener l) |
| |
| void | setConnection (BowlerAbstractConnection connection) |
| |
| BowlerAbstractConnection | getConnection () |
| |
| void | setAddress (MACAddress address) |
| |
| MACAddress | getAddress () |
| |
| BowlerDatagram | send (BowlerAbstractCommand command) throws NoConnectionAvailableException, InvalidResponseException |
| |
| BowlerDatagram | send (BowlerAbstractCommand command, int retry) throws NoConnectionAvailableException, InvalidResponseException |
| |
| Object[] | send (String namespace, BowlerMethod method, String rpcString, Object[] arguments, int retry) throws DeviceConnectionException |
| |
| Object[] | send (String namespace, BowlerMethod method, String rpcString, Object[] arguments) throws DeviceConnectionException |
| |
| boolean | ping () |
| |
| boolean | ping (boolean switchParser) |
| |
| ArrayList< ByteList > | getRevisions () |
| |
| boolean | hasNamespace (String string) |
| |
| void | startHeartBeat () |
| |
| void | startHeartBeat (long msHeartBeatTime) |
| |
| void | stopHeartBeat () |
| |
| void | setThreadedUpstreamPackets (boolean up) |
| |
| ArrayList< RpcEncapsulation > | getRpcList (String namespace) |
| |
| void | loadRpcList () |
| |
| void | onAllResponse (BowlerDatagram data) |
| |
| boolean | isKeepAlive () |
| |
| void | setKeepAlive (boolean keepAlive) |
| |
| long | getLastPacketTime () |
| |
| void | setLastPacketTime (long lastPacketTime) |
| |
| String | getScriptingName () |
| |
| void | setScriptingName (String scriptingName) |
| |
| ArrayList< IDeviceConnectionEventListener > | getDisconnectListeners () |
| |

 Public Member Functions inherited from
Public Member Functions inherited from