
Private Attributes | |
| IPidControlNamespace | pid |
| int | index |
| float | targetValue |
| float | currentCachedPosition |
| ArrayList< IPIDEventListener > | PIDEventListeners = new ArrayList<IPIDEventListener>() |
Detailed Description
The Class PIDChannel.
Definition at line 12 of file PIDChannel.java.
Constructor & Destructor Documentation
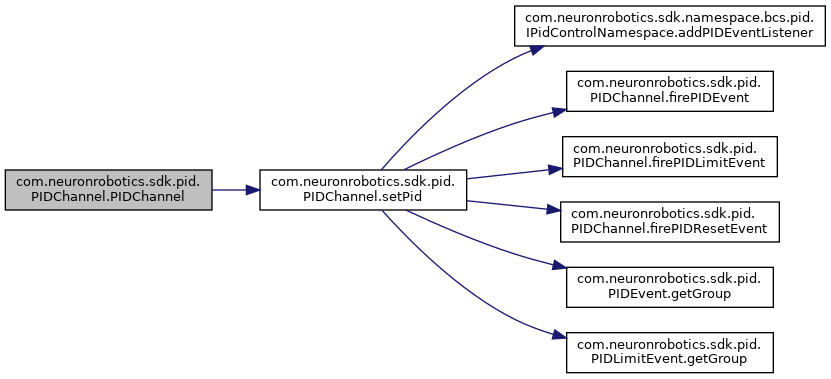
◆ PIDChannel()
| com.neuronrobotics.sdk.pid.PIDChannel.PIDChannel | ( | IPidControlNamespace | p, |
| int | i | ||
| ) |
Instantiates a new PID channel.
- Parameters
-
p the p i the i
Definition at line 35 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.index, and com.neuronrobotics.sdk.pid.PIDChannel.setPid().
Member Function Documentation
◆ addPIDEventListener()
| void com.neuronrobotics.sdk.pid.PIDChannel.addPIDEventListener | ( | IPIDEventListener | l | ) |
Adds the pid event listener.
- Parameters
-
l the l
Definition at line 183 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.PIDEventListeners.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.runHome(), com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.setPIDChannel(), and com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.setPIDChannel().
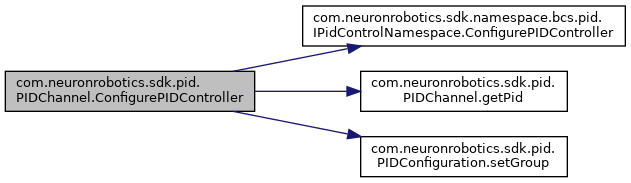
◆ ConfigurePIDController()
| boolean com.neuronrobotics.sdk.pid.PIDChannel.ConfigurePIDController | ( | PIDConfiguration | config | ) |
Configure pid controller.
- Parameters
-
config the config
- Returns
- true, if successful
Definition at line 91 of file PIDChannel.java.
References com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.ConfigurePIDController(), com.neuronrobotics.sdk.pid.PIDChannel.getPid(), com.neuronrobotics.sdk.pid.PIDChannel.index, and com.neuronrobotics.sdk.pid.PIDConfiguration.setGroup().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.homeLink().
◆ firePIDEvent()
| void com.neuronrobotics.sdk.pid.PIDChannel.firePIDEvent | ( | PIDEvent | e | ) |
Fire pid event.
- Parameters
-
e the e
Definition at line 205 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.PIDEventListeners.
Referenced by com.neuronrobotics.sdk.pid.PIDChannel.setPid().
◆ firePIDLimitEvent()
| void com.neuronrobotics.sdk.pid.PIDChannel.firePIDLimitEvent | ( | PIDLimitEvent | e | ) |
Fire pid limit event.
- Parameters
-
e the e
Definition at line 194 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.PIDEventListeners.
Referenced by com.neuronrobotics.sdk.pid.PIDChannel.setPid().
◆ firePIDResetEvent()
| void com.neuronrobotics.sdk.pid.PIDChannel.firePIDResetEvent | ( | int | group, |
| float | value | ||
| ) |
Fire pid reset event.
- Parameters
-
group the group value the value
Definition at line 218 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.PIDEventListeners.
Referenced by com.neuronrobotics.sdk.pid.PIDChannel.setPid().
◆ flush()
| void com.neuronrobotics.sdk.pid.PIDChannel.flush | ( | double | time | ) |
Flush.
- Parameters
-
time the time
Definition at line 229 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.getCachedTargetValue(), and com.neuronrobotics.sdk.pid.PIDChannel.SetPIDSetPoint().
Referenced by com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.flushDevice(), and com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.flushDevice().

◆ getCachedTargetValue()
| float com.neuronrobotics.sdk.pid.PIDChannel.getCachedTargetValue | ( | ) |
Gets the cached target value.
- Returns
- the cached target value
Definition at line 252 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.targetValue.
Referenced by com.neuronrobotics.sdk.pid.PIDChannel.flush(), com.neuronrobotics.sdk.namespace.bcs.pid.AbstractPidNamespaceImp.flushPIDChannels(), com.neuronrobotics.sdk.pid.VirtualGenericPIDDevice.flushPIDChannels(), and com.neuronrobotics.sdk.namespace.bcs.pid.LegacyPidNamespaceImp.SetAllPIDSetPoint().
◆ getCurrentCachedPosition()
| float com.neuronrobotics.sdk.pid.PIDChannel.getCurrentCachedPosition | ( | ) |
Gets the current cached position.
- Returns
- the current cached position
Definition at line 274 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.currentCachedPosition.
Referenced by com.neuronrobotics.sdk.namespace.bcs.pid.AbstractPidNamespaceImp.GetCachedPosition().
◆ getGroup()
| int com.neuronrobotics.sdk.pid.PIDChannel.getGroup | ( | ) |
Gets the group.
- Returns
- the group
Definition at line 293 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.index.
Referenced by com.neuronrobotics.sdk.pid.PIDChannel.setCachedTargetValue().
◆ getPid()
| IPidControlNamespace com.neuronrobotics.sdk.pid.PIDChannel.getPid | ( | ) |
Gets the pid.
- Returns
- the pid
Definition at line 163 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.pid.
Referenced by com.neuronrobotics.sdk.pid.PIDChannel.ConfigurePIDController(), com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.flushAllDevice(), com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.flushAllDevice(), com.neuronrobotics.sdk.pid.PIDChannel.getPIDConfiguration(), com.neuronrobotics.sdk.pid.PIDChannel.GetPIDPosition(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.homeLink(), com.neuronrobotics.sdk.pid.PIDChannel.ResetPIDChannel(), com.neuronrobotics.sdk.pid.PIDChannel.SetPDVelocity(), com.neuronrobotics.sdk.pid.PIDChannel.SetPIDInterpolatedVelocity(), and com.neuronrobotics.sdk.pid.PIDChannel.SetPIDSetPoint().
◆ getPIDConfiguration()
| PIDConfiguration com.neuronrobotics.sdk.pid.PIDChannel.getPIDConfiguration | ( | ) |
Gets the PID configuration.
- Returns
- the PID configuration
Definition at line 102 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.getPid(), com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.getPIDConfiguration(), and com.neuronrobotics.sdk.pid.PIDChannel.index.

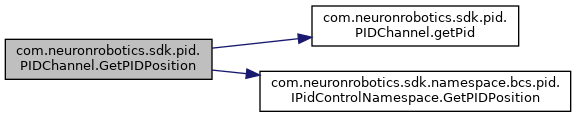
◆ GetPIDPosition()
| float com.neuronrobotics.sdk.pid.PIDChannel.GetPIDPosition | ( | ) |
Gets the pid position.
- Returns
- the int
Definition at line 81 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.getPid(), com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.GetPIDPosition(), and com.neuronrobotics.sdk.pid.PIDChannel.index.
Referenced by com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.getCurrentPosition(), and com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.getCurrentPosition().
◆ isAvailable()
| boolean com.neuronrobotics.sdk.pid.PIDChannel.isAvailable | ( | ) |
Checks if is available.
- Returns
- true, if is available
Definition at line 283 of file PIDChannel.java.
References com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.isAvailable(), and com.neuronrobotics.sdk.pid.PIDChannel.pid.

◆ removePIDEventListener()
| void com.neuronrobotics.sdk.pid.PIDChannel.removePIDEventListener | ( | IPIDEventListener | l | ) |
Removes the pid event listener.
- Parameters
-
l the l
Definition at line 172 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.PIDEventListeners.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.runHome().
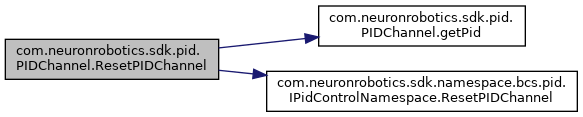
◆ ResetPIDChannel() [1/2]
| boolean com.neuronrobotics.sdk.pid.PIDChannel.ResetPIDChannel | ( | ) |
Reset pid channel.
- Returns
- true, if successful
Definition at line 111 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.getPid(), com.neuronrobotics.sdk.pid.PIDChannel.index, and com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.ResetPIDChannel().
◆ ResetPIDChannel() [2/2]
| boolean com.neuronrobotics.sdk.pid.PIDChannel.ResetPIDChannel | ( | int | valueToSetCurrentTo | ) |
Reset pid channel.
- Parameters
-
valueToSetCurrentTo the value to set current to
- Returns
- true, if successful
Definition at line 122 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.getPid(), com.neuronrobotics.sdk.pid.PIDChannel.index, and com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.ResetPIDChannel().
◆ setCachedTargetValue()
| void com.neuronrobotics.sdk.pid.PIDChannel.setCachedTargetValue | ( | float | targetValue | ) |
Sets the cached target value.
- Parameters
-
targetValue the new cached target value
Definition at line 238 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.getGroup(), com.neuronrobotics.sdk.common.Log.info(), and com.neuronrobotics.sdk.pid.PIDChannel.targetValue.
Referenced by com.neuronrobotics.sdk.addons.kinematics.PidPrismaticLink.cacheTargetValueDevice(), com.neuronrobotics.sdk.addons.kinematics.PidRotoryLink.cacheTargetValueDevice(), com.neuronrobotics.sdk.namespace.bcs.pid.LegacyPidNamespaceImp.GetAllPIDPosition(), com.neuronrobotics.sdk.pid.VirtualGenericPIDDevice.GetAllPIDPosition(), com.neuronrobotics.sdk.namespace.bcs.pid.LegacyPidNamespaceImp.SetAllPIDSetPoint(), and com.neuronrobotics.sdk.namespace.bcs.pid.LegacyPidNamespaceImp.SetPIDSetPoint().

◆ setCurrentCachedPosition()
| void com.neuronrobotics.sdk.pid.PIDChannel.setCurrentCachedPosition | ( | float | currentCachedPosition | ) |
Sets the current cached position.
- Parameters
-
currentCachedPosition the new current cached position
Definition at line 263 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.currentCachedPosition.
Referenced by com.neuronrobotics.sdk.namespace.bcs.pid.AbstractPidNamespaceImp.AbstractPidNamespaceImp(), and com.neuronrobotics.sdk.namespace.bcs.pid.AbstractPidNamespaceImp.SetCachedPosition().
◆ SetPDVelocity()
| boolean com.neuronrobotics.sdk.pid.PIDChannel.SetPDVelocity | ( | int | unitsPerSecond, |
| double | seconds | ||
| ) | throws PIDCommandException |
Sets the pd velocity.
- Parameters
-
unitsPerSecond the units per second seconds the seconds
- Returns
- true, if successful
- Exceptions
-
PIDCommandException the PID command exception
Definition at line 72 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.getPid(), com.neuronrobotics.sdk.pid.PIDChannel.index, and com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.SetPDVelocity().
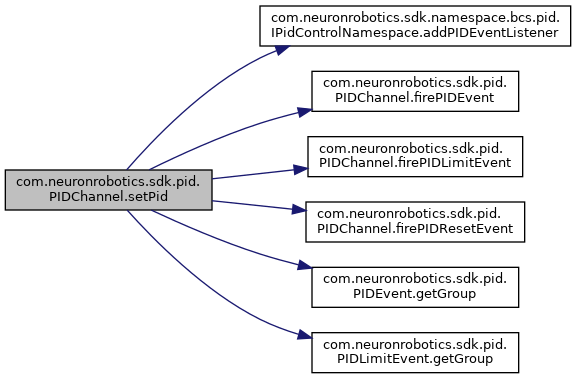
◆ setPid()
| void com.neuronrobotics.sdk.pid.PIDChannel.setPid | ( | IPidControlNamespace | p | ) |
Sets the pid.
- Parameters
-
p the new pid
Definition at line 131 of file PIDChannel.java.
References com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.addPIDEventListener(), com.neuronrobotics.sdk.pid.PIDChannel.firePIDEvent(), com.neuronrobotics.sdk.pid.PIDChannel.firePIDLimitEvent(), com.neuronrobotics.sdk.pid.PIDChannel.firePIDResetEvent(), com.neuronrobotics.sdk.pid.PIDEvent.getGroup(), com.neuronrobotics.sdk.pid.PIDLimitEvent.getGroup(), com.neuronrobotics.sdk.pid.PIDChannel.index, and com.neuronrobotics.sdk.pid.PIDChannel.pid.
Referenced by com.neuronrobotics.sdk.pid.PIDChannel.PIDChannel().
◆ SetPIDInterpolatedVelocity()
| boolean com.neuronrobotics.sdk.pid.PIDChannel.SetPIDInterpolatedVelocity | ( | int | unitsPerSecond, |
| double | seconds | ||
| ) | throws PIDCommandException |
Sets the pid interpolated velocity.
- Parameters
-
unitsPerSecond the units per second seconds the seconds
- Returns
- true, if successful
- Exceptions
-
PIDCommandException the PID command exception
Definition at line 60 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.getPid(), com.neuronrobotics.sdk.pid.PIDChannel.index, and com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.SetPIDInterpolatedVelocity().

◆ SetPIDSetPoint()
| boolean com.neuronrobotics.sdk.pid.PIDChannel.SetPIDSetPoint | ( | float | setpoint, |
| double | seconds | ||
| ) |
Sets the pid set point.
- Parameters
-
setpoint the setpoint seconds the seconds
- Returns
- true, if successful
Definition at line 47 of file PIDChannel.java.
References com.neuronrobotics.sdk.pid.PIDChannel.getPid(), com.neuronrobotics.sdk.pid.PIDChannel.index, and com.neuronrobotics.sdk.namespace.bcs.pid.IPidControlNamespace.SetPIDSetPoint().
Referenced by com.neuronrobotics.sdk.pid.PIDChannel.flush(), and com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.runHome().
Member Data Documentation
◆ currentCachedPosition
|
private |
The current cached position.
Definition at line 24 of file PIDChannel.java.
Referenced by com.neuronrobotics.sdk.pid.PIDChannel.getCurrentCachedPosition(), and com.neuronrobotics.sdk.pid.PIDChannel.setCurrentCachedPosition().
◆ index
|
private |
The index.
Definition at line 18 of file PIDChannel.java.
Referenced by com.neuronrobotics.sdk.pid.PIDChannel.ConfigurePIDController(), com.neuronrobotics.sdk.pid.PIDChannel.getGroup(), com.neuronrobotics.sdk.pid.PIDChannel.getPIDConfiguration(), com.neuronrobotics.sdk.pid.PIDChannel.GetPIDPosition(), com.neuronrobotics.sdk.pid.PIDChannel.PIDChannel(), com.neuronrobotics.sdk.pid.PIDChannel.ResetPIDChannel(), com.neuronrobotics.sdk.pid.PIDChannel.SetPDVelocity(), com.neuronrobotics.sdk.pid.PIDChannel.setPid(), com.neuronrobotics.sdk.pid.PIDChannel.SetPIDInterpolatedVelocity(), and com.neuronrobotics.sdk.pid.PIDChannel.SetPIDSetPoint().
◆ pid
|
private |
The pid.
Definition at line 15 of file PIDChannel.java.
Referenced by com.neuronrobotics.sdk.pid.PIDChannel.getPid(), com.neuronrobotics.sdk.pid.PIDChannel.isAvailable(), and com.neuronrobotics.sdk.pid.PIDChannel.setPid().
◆ PIDEventListeners
|
private |
The PID event listeners.
Definition at line 27 of file PIDChannel.java.
Referenced by com.neuronrobotics.sdk.pid.PIDChannel.addPIDEventListener(), com.neuronrobotics.sdk.pid.PIDChannel.firePIDEvent(), com.neuronrobotics.sdk.pid.PIDChannel.firePIDLimitEvent(), com.neuronrobotics.sdk.pid.PIDChannel.firePIDResetEvent(), and com.neuronrobotics.sdk.pid.PIDChannel.removePIDEventListener().
◆ targetValue
|
private |
The target value.
Definition at line 21 of file PIDChannel.java.
Referenced by com.neuronrobotics.sdk.pid.PIDChannel.getCachedTargetValue(), and com.neuronrobotics.sdk.pid.PIDChannel.setCachedTargetValue().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/pid/PIDChannel.java