Public Member Functions | |
| DHLink (double d, double theta, double r, double alpha) | |
| DHLink (Element nNode, LinkConfiguration newLinkConf) | |
| DHLink (DHLink dhl) | |
| void | fireOnLinkGlobalPositionChange (TransformNR newPose) |
| void | addDhLinkPositionListener (IDhLinkPositionListener l) |
| void | removeDhLinkPositionListener (IDhLinkPositionListener l) |
| String | getXml () |
| double | getD () |
| double | getTheta () |
| double | getR () |
| double | getAlpha () |
| Matrix | DhStepInverse (Matrix end, double jointValue) |
| Matrix | DhStep (double jointValue) |
| Matrix | DhStep (double rotory, double prismatic) |
| Matrix | DhStepInverse (Matrix end, double rotory, double prismatic) |
| Matrix | DhStepInverse (double rotory, double prismatic) |
| Matrix | DhStepInversePrismatic (double prismatic) |
| Matrix | DhStepInverseRotory (double rotory) |
| void | setTransX (Matrix transX) |
| void | setRotX (Matrix rotX) |
| Matrix | getTransX () |
| Matrix | getRotX () |
| Matrix | getTransZ () |
| Matrix | getRotZ () |
| Matrix | DhStepJacobian (double rotoryVelocity, double prismaticVelocity) |
| Matrix | getRotX_J () |
| Matrix | getTransX_J () |
| Matrix | getTransZ_J () |
| Matrix | getRotZ_J () |
| String | toString () |
| Object | getListener () |
| void | setListener (Object listener) |
| Object | getRootListener () |
| double | getDelta () |
| void | setDelta (double d) |
| double | getRadius () |
| void | setRadius (double radius) |
| void | setTheta (double theta) |
| void | setAlpha (double alpha) |
| DhLinkType | getLinkType () |
| void | setLinkType (DhLinkType type) |
| void | setMobileBaseXml (MobileBase embedableXml) |
| MobileBase | getSlaveMobileBase () |
| void | setSlaveMobileBase (MobileBase embedableXml) |
Private Member Functions | |
| void | setMatrix (double rotory, double prismatic) |
| void | setJacobianMatrix (double rotory, double prismatic) |
Private Attributes | |
| double | d |
| double | theta |
| double | radius |
| double | alpha |
| Matrix | transX |
| Matrix | rotX |
| Matrix | transZ |
| Matrix | rotZ |
| Matrix | transX_J |
| Matrix | rotX_J |
| Matrix | transZ_J |
| Matrix | rotZ_J |
| Object | listener =null |
| Object | root =null |
| DhLinkType | type = DhLinkType.ROTORY |
| ArrayList< IDhLinkPositionListener > | dhlisteners = new ArrayList<IDhLinkPositionListener>() |
| MobileBase | slaveMobileBase =null |
| LinkConfiguration | newLinkConf |
Detailed Description
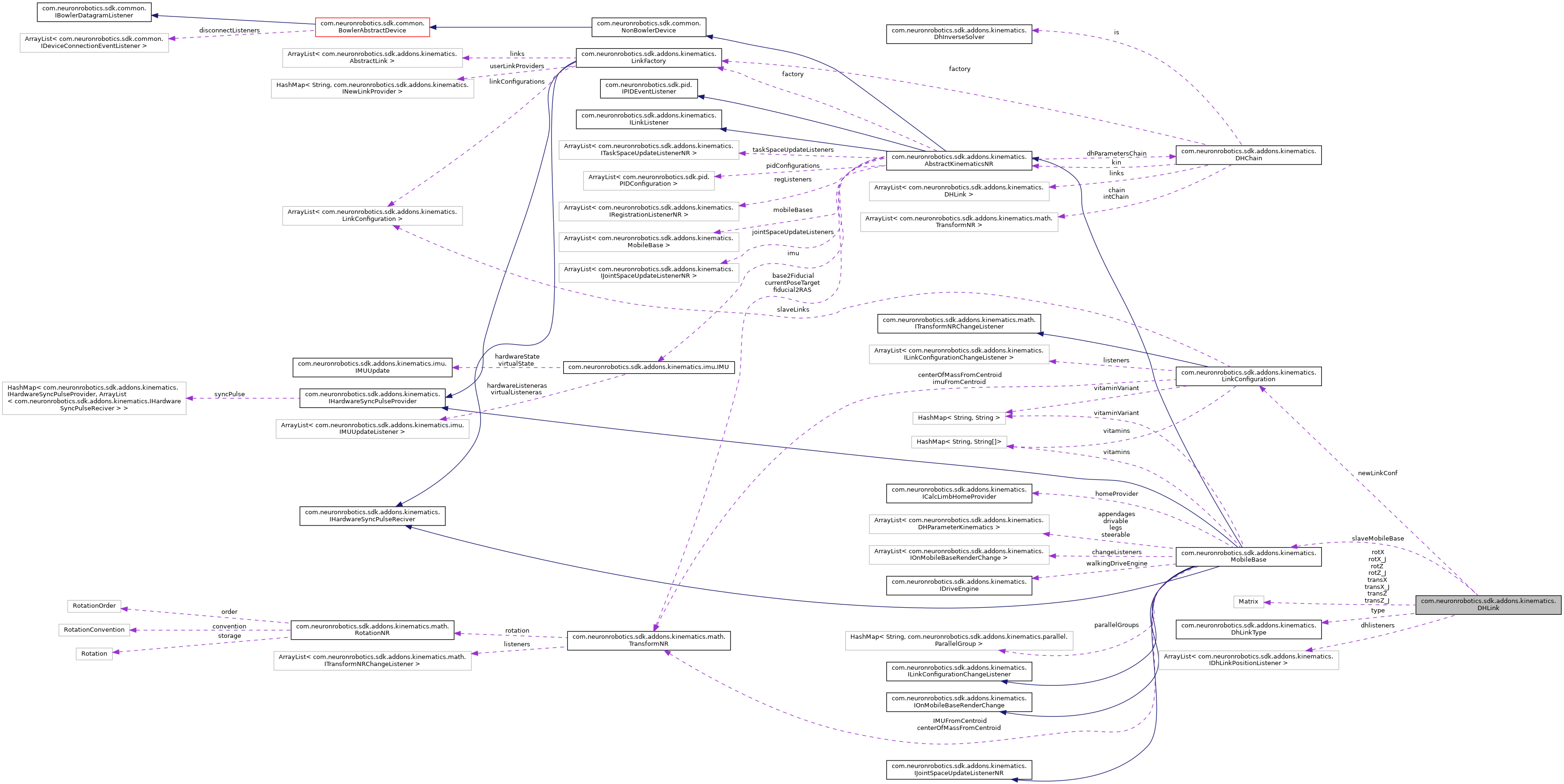
The Class DHLink.
Definition at line 17 of file DHLink.java.
Constructor & Destructor Documentation
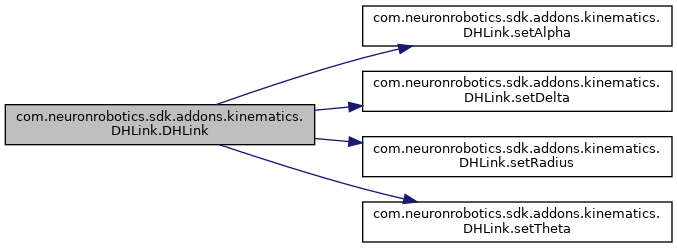
◆ DHLink() [1/3]
| com.neuronrobotics.sdk.addons.kinematics.DHLink.DHLink | ( | double | d, |
| double | theta, | ||
| double | r, | ||
| double | alpha | ||
| ) |
Instantiates a new DH link.
- Parameters
-
d the d theta the theta r the r alpha the alpha
Definition at line 81 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.setAlpha(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setDelta(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setRadius(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setTheta().
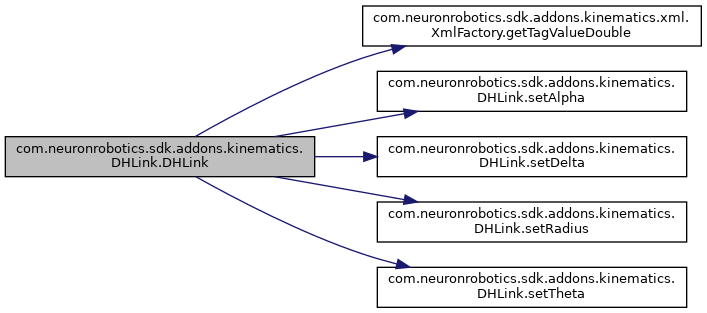
◆ DHLink() [2/3]
| com.neuronrobotics.sdk.addons.kinematics.DHLink.DHLink | ( | Element | nNode, |
| LinkConfiguration | newLinkConf | ||
| ) |
Instantiates a new DH link.
- Parameters
-
nNode the n node newLinkConf
Definition at line 95 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.xml.XmlFactory.getTagValueDouble(), com.neuronrobotics.sdk.addons.kinematics.DHLink.newLinkConf, com.neuronrobotics.sdk.addons.kinematics.DHLink.setAlpha(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setDelta(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setRadius(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setTheta().
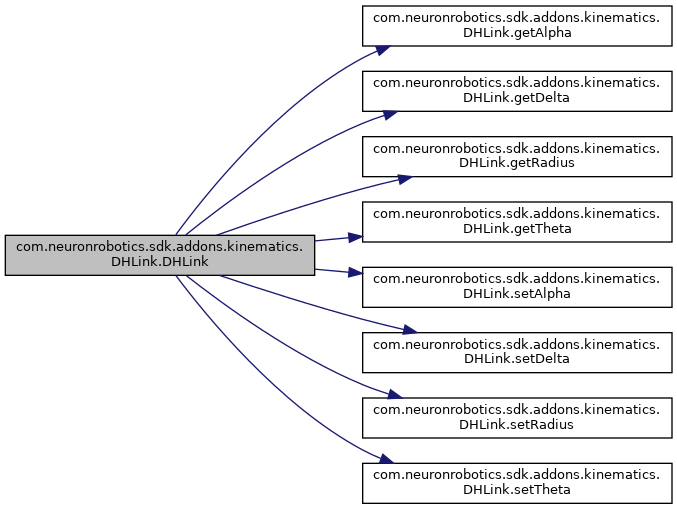
◆ DHLink() [3/3]
| com.neuronrobotics.sdk.addons.kinematics.DHLink.DHLink | ( | DHLink | dhl | ) |
Definition at line 104 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.getAlpha(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getDelta(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getRadius(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getTheta(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setAlpha(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setDelta(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setRadius(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setTheta().
Member Function Documentation
◆ addDhLinkPositionListener()
| void com.neuronrobotics.sdk.addons.kinematics.DHLink.addDhLinkPositionListener | ( | IDhLinkPositionListener | l | ) |
Adds the dh link position listener.
- Parameters
-
l the l
Definition at line 129 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.dhlisteners.
◆ DhStep() [1/2]
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStep | ( | double | jointValue | ) |
Dh step prismatic.
- Parameters
-
jointValue the joint value
- Returns
- the matrix
Definition at line 227 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.type.
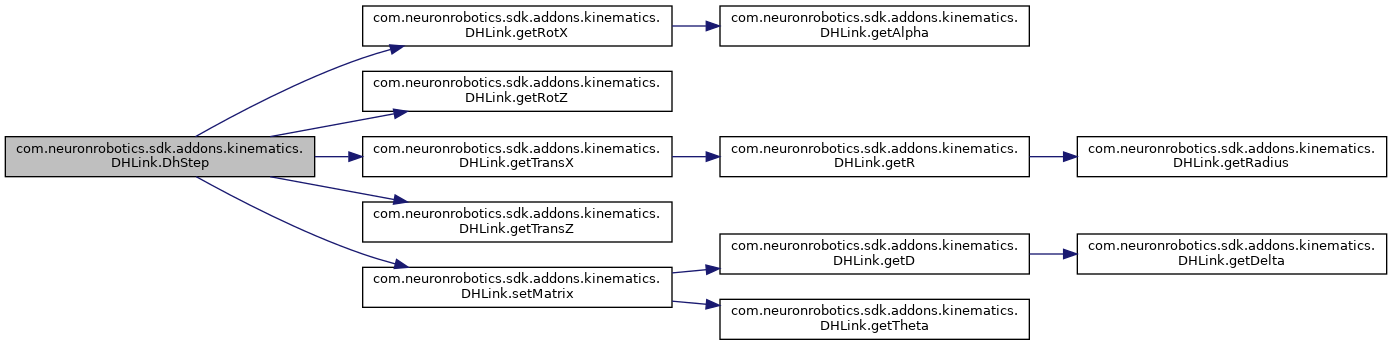
◆ DhStep() [2/2]
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStep | ( | double | rotory, |
| double | prismatic | ||
| ) |
Dh step.
- Parameters
-
rotory the rotory prismatic the prismatic
- Returns
- the matrix
Definition at line 247 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotX(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotZ(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransX(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransZ(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setMatrix().
◆ DhStepInverse() [1/3]
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverse | ( | double | rotory, |
| double | prismatic | ||
| ) |
Dh step inverse.
- Parameters
-
rotory the rotory prismatic the prismatic
- Returns
- the matrix
Definition at line 286 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverse(), and com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getMatrixTransform().

◆ DhStepInverse() [2/3]
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverse | ( | Matrix | end, |
| double | jointValue | ||
| ) |
Dh step inverse .
- Parameters
-
end the end jointValue the joint value
- Returns
- the matrix
Definition at line 208 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.type.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverse(), com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInversePrismatic(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverseRotory().
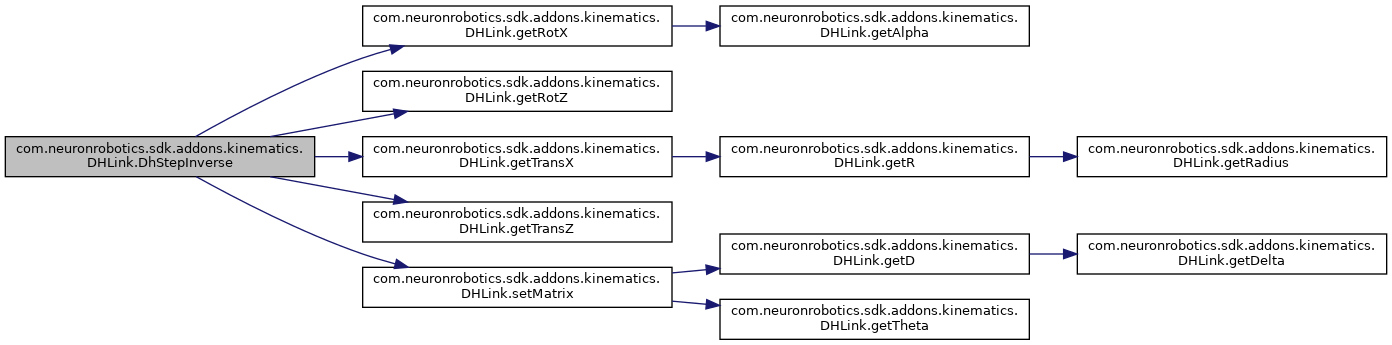
◆ DhStepInverse() [3/3]
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverse | ( | Matrix | end, |
| double | rotory, | ||
| double | prismatic | ||
| ) |
Dh step inverse.
- Parameters
-
end the end rotory the rotory prismatic the prismatic
- Returns
- the matrix
Definition at line 268 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotX(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotZ(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransX(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransZ(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setMatrix().
◆ DhStepInversePrismatic()
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInversePrismatic | ( | double | prismatic | ) |
Dh step inverse.
- Parameters
-
prismatic the prismatic
- Returns
- the matrix
Definition at line 300 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverse().
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().

◆ DhStepInverseRotory()
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverseRotory | ( | double | rotory | ) |
Dh step inverse.
- Parameters
-
rotory the rotory
- Returns
- the matrix
Definition at line 312 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverse().
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().

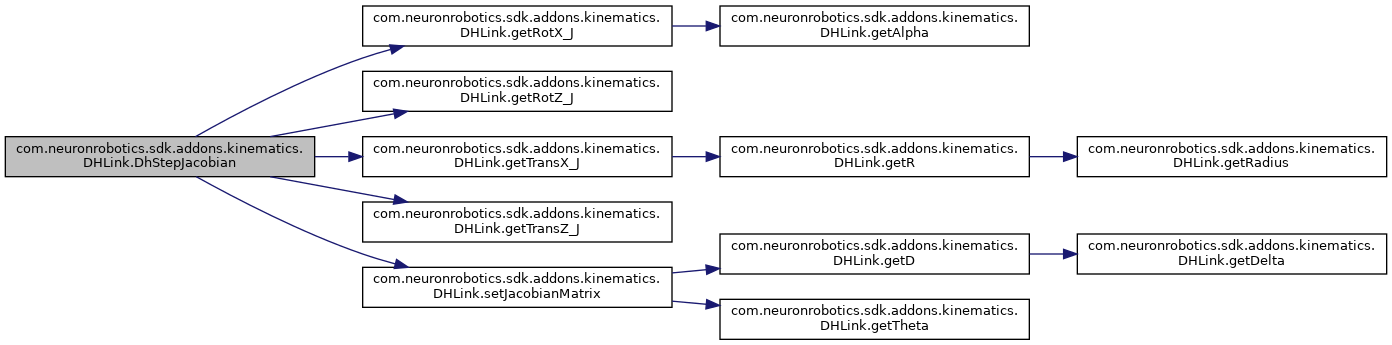
◆ DhStepJacobian()
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepJacobian | ( | double | rotoryVelocity, |
| double | prismaticVelocity | ||
| ) |
Gets a jacobian matrix of this link.
- Parameters
-
rotoryVelocity the rotory velocity prismaticVelocity the prismatic velocity
- Returns
- the Jacobian
Definition at line 413 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotX_J(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotZ_J(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransX_J(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransZ_J(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setJacobianMatrix().
◆ fireOnLinkGlobalPositionChange()
| void com.neuronrobotics.sdk.addons.kinematics.DHLink.fireOnLinkGlobalPositionChange | ( | TransformNR | newPose | ) |
Fire on link global position change.
- Parameters
-
newPose the new pose
Definition at line 116 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.dhlisteners, com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setGlobalToFiducialTransform(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.slaveMobileBase.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.onJointSpaceUpdate().

◆ getAlpha()
| double com.neuronrobotics.sdk.addons.kinematics.DHLink.getAlpha | ( | ) |
Gets the alpha.
- Returns
- the alpha
Definition at line 196 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.alpha.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DHLink(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotX(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotX_J(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.toString().
◆ getD()
| double com.neuronrobotics.sdk.addons.kinematics.DHLink.getD | ( | ) |
Gets the d.
- Returns
- the d
Definition at line 169 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.getDelta().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.setJacobianMatrix(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setMatrix().

◆ getDelta()
| double com.neuronrobotics.sdk.addons.kinematics.DHLink.getDelta | ( | ) |
Gets the delta.
- Returns
- the delta
Definition at line 551 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.d.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DHLink(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getD(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.toString().
◆ getLinkType()
| DhLinkType com.neuronrobotics.sdk.addons.kinematics.DHLink.getLinkType | ( | ) |
Checks if is degenerate.
- Returns
- true, if is degenerate
Definition at line 613 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.type.
◆ getListener()
| Object com.neuronrobotics.sdk.addons.kinematics.DHLink.getListener | ( | ) |
Gets the listener.
- Returns
- the listener
Definition at line 515 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.listener.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateLimb().
◆ getR()
| double com.neuronrobotics.sdk.addons.kinematics.DHLink.getR | ( | ) |
Gets the r.
- Returns
- the r
Definition at line 187 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.getRadius().
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransX(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransX_J().

◆ getRadius()
| double com.neuronrobotics.sdk.addons.kinematics.DHLink.getRadius | ( | ) |
Gets the radius.
- Returns
- the radius
Definition at line 570 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.radius.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DHLink(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getR(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.toString().
◆ getRootListener()
| Object com.neuronrobotics.sdk.addons.kinematics.DHLink.getRootListener | ( | ) |
Gets the root listener.
- Returns
- the root listener
Definition at line 533 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.root.
◆ getRotX()
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotX | ( | ) |
Gets the rot x.
- Returns
- the rot x
Definition at line 377 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.getAlpha(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.rotX.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStep(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverse().

◆ getRotX_J()
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotX_J | ( | ) |
Gets the rot x_ j.
- Returns
- the rot x_ j
Definition at line 450 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.getAlpha(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.rotX_J.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepJacobian().

◆ getRotZ()
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotZ | ( | ) |
Gets the rot z.
- Returns
- the rot z
Definition at line 402 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.rotZ.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStep(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverse().
◆ getRotZ_J()
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotZ_J | ( | ) |
Gets the rot z_ j.
- Returns
- the rot z_ j
Definition at line 493 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.rotZ_J.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepJacobian().
◆ getSlaveMobileBase()
| MobileBase com.neuronrobotics.sdk.addons.kinematics.DHLink.getSlaveMobileBase | ( | ) |
Definition at line 635 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.slaveMobileBase.
Referenced by com.neuronrobotics.sdk.addons.kinematics.MobileBase.addListeners(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.generateCad(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getSlaveMobileBase(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.getXml().
◆ getTheta()
| double com.neuronrobotics.sdk.addons.kinematics.DHLink.getTheta | ( | ) |
Gets the theta.
- Returns
- the theta
Definition at line 178 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.theta.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DHLink(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setJacobianMatrix(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setMatrix(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.toString().
◆ getTransX()
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransX | ( | ) |
Gets the trans x.
- Returns
- the trans x
Definition at line 361 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.getR(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.transX.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStep(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverse().

◆ getTransX_J()
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransX_J | ( | ) |
Gets the trans x_ j.
- Returns
- the trans x_ j
Definition at line 466 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.getR(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.transX_J.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepJacobian().

◆ getTransZ()
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransZ | ( | ) |
Gets the trans z.
- Returns
- the trans z
Definition at line 393 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.transZ.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStep(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverse().
◆ getTransZ_J()
| Matrix com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransZ_J | ( | ) |
Gets the trans z_ j.
- Returns
- the trans z_ j
Definition at line 484 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.transZ_J.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepJacobian().
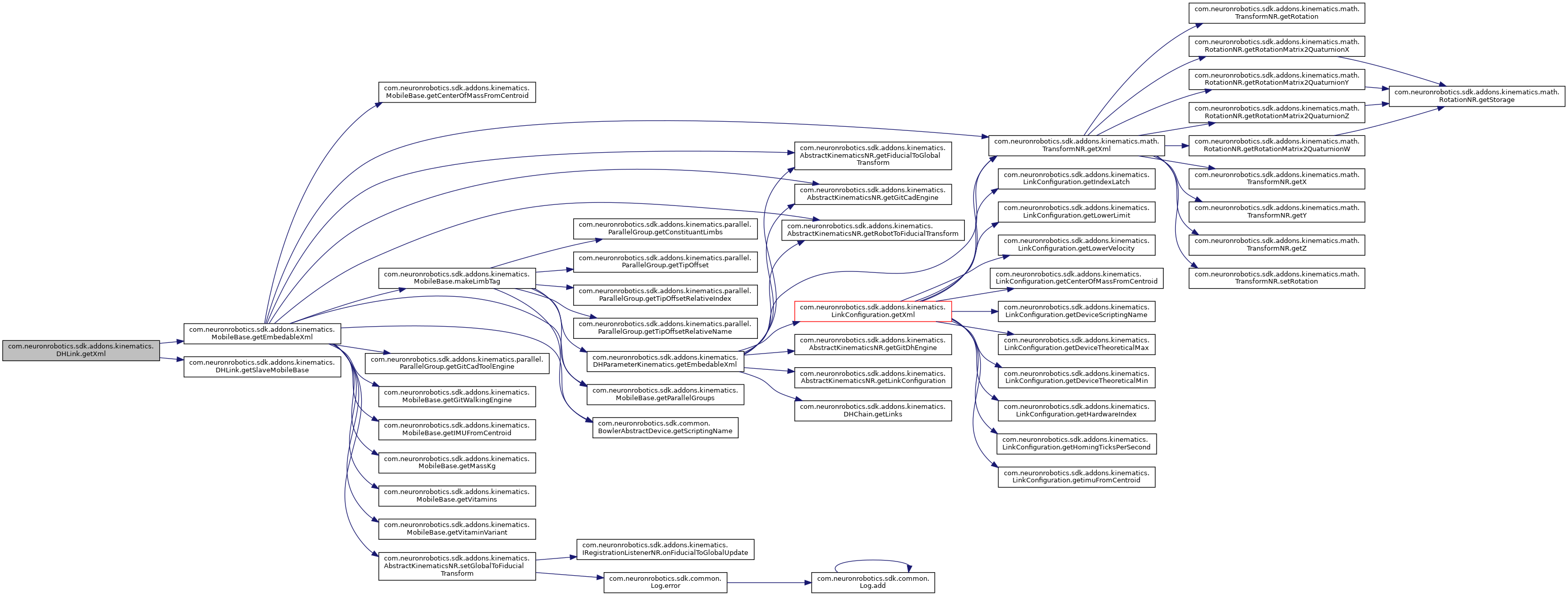
◆ getXml()
| String com.neuronrobotics.sdk.addons.kinematics.DHLink.getXml | ( | ) |
Gets the xml.
- Returns
- the xml
Definition at line 153 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.alpha, com.neuronrobotics.sdk.addons.kinematics.DHLink.d, com.neuronrobotics.sdk.addons.kinematics.MobileBase.getEmbedableXml(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getSlaveMobileBase(), com.neuronrobotics.sdk.addons.kinematics.DHLink.radius, and com.neuronrobotics.sdk.addons.kinematics.DHLink.theta.
◆ removeDhLinkPositionListener()
| void com.neuronrobotics.sdk.addons.kinematics.DHLink.removeDhLinkPositionListener | ( | IDhLinkPositionListener | l | ) |
Removes the dh link position listener.
- Parameters
-
l the l
Definition at line 139 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.dhlisteners.
◆ setAlpha()
| void com.neuronrobotics.sdk.addons.kinematics.DHLink.setAlpha | ( | double | alpha | ) |
Sets the alpha.
- Parameters
-
alpha the new alpha
Definition at line 601 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.alpha, com.neuronrobotics.sdk.addons.kinematics.DHLink.newLinkConf, com.neuronrobotics.sdk.addons.kinematics.DHLink.rotX, and com.neuronrobotics.sdk.addons.kinematics.DHLink.rotX_J.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DHLink().
◆ setDelta()
| void com.neuronrobotics.sdk.addons.kinematics.DHLink.setDelta | ( | double | d | ) |
Sets the delta.
- Parameters
-
d the new delta
Definition at line 560 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.d, and com.neuronrobotics.sdk.addons.kinematics.DHLink.newLinkConf.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DHLink().
◆ setJacobianMatrix()
|
private |
Sets up the 2 alterable Jacobian matrixs .
- Parameters
-
rotory the rotory velocity of the Theta link prismatic the linear velocity of the D link
Definition at line 431 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.getD(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getTheta(), com.neuronrobotics.sdk.addons.kinematics.DHLink.rotZ_J, and com.neuronrobotics.sdk.addons.kinematics.DHLink.transZ_J.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepJacobian().

◆ setLinkType()
| void com.neuronrobotics.sdk.addons.kinematics.DHLink.setLinkType | ( | DhLinkType | type | ) |
Sets the type.
- Parameters
-
type the new type
Definition at line 622 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.type.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.addNewLink().
◆ setListener()
| void com.neuronrobotics.sdk.addons.kinematics.DHLink.setListener | ( | Object | listener | ) |
Sets the listener.
- Parameters
-
listener the new listener
Definition at line 524 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.listener.
Referenced by com.neuronrobotics.bowlerstudio.scripting.RobotHelper.getDefaultContents(), and com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.updateLimb().
◆ setMatrix()
|
private |
Sets the matrix.
- Parameters
-
rotory the rotory prismatic the prismatic
Definition at line 342 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.getD(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getTheta(), com.neuronrobotics.sdk.addons.kinematics.DHLink.rotZ, and com.neuronrobotics.sdk.addons.kinematics.DHLink.transZ.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStep(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverse().

◆ setMobileBaseXml()
| void com.neuronrobotics.sdk.addons.kinematics.DHLink.setMobileBaseXml | ( | MobileBase | embedableXml | ) |
Sets the mobile base xml.
- Parameters
-
embedableXml the new mobile base xml
Definition at line 631 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.setSlaveMobileBase().
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.loadConfig().

◆ setRadius()
| void com.neuronrobotics.sdk.addons.kinematics.DHLink.setRadius | ( | double | radius | ) |
Sets the radius.
- Parameters
-
radius the new radius
Definition at line 579 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.newLinkConf, com.neuronrobotics.sdk.addons.kinematics.DHLink.radius, com.neuronrobotics.sdk.addons.kinematics.DHLink.transX, and com.neuronrobotics.sdk.addons.kinematics.DHLink.transX_J.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DHLink().
◆ setRotX()
| void com.neuronrobotics.sdk.addons.kinematics.DHLink.setRotX | ( | Matrix | rotX | ) |
Sets the rot x.
- Parameters
-
rotX the new rot x
Definition at line 331 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.rotX.
◆ setSlaveMobileBase()
| void com.neuronrobotics.sdk.addons.kinematics.DHLink.setSlaveMobileBase | ( | MobileBase | embedableXml | ) |
Definition at line 639 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.setMobileBaseXml().
◆ setTheta()
| void com.neuronrobotics.sdk.addons.kinematics.DHLink.setTheta | ( | double | theta | ) |
Sets the theta.
- Parameters
-
theta the new theta
Definition at line 591 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.newLinkConf, and com.neuronrobotics.sdk.addons.kinematics.DHLink.theta.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DHLink().
◆ setTransX()
| void com.neuronrobotics.sdk.addons.kinematics.DHLink.setTransX | ( | Matrix | transX | ) |
Sets the trans x.
- Parameters
-
transX the new trans x
Definition at line 322 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.transX.
◆ toString()
| String com.neuronrobotics.sdk.addons.kinematics.DHLink.toString | ( | ) |
Definition at line 501 of file DHLink.java.
References com.neuronrobotics.sdk.addons.kinematics.DHLink.getAlpha(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getDelta(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getRadius(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.getTheta().
Member Data Documentation
◆ alpha
|
private |
The alpha.
Definition at line 29 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getAlpha(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getXml(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setAlpha().
◆ d
|
private |
The d.
Definition at line 20 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getDelta(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getXml(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setDelta().
◆ dhlisteners
|
private |
The dhlisteners.
Definition at line 65 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.addDhLinkPositionListener(), com.neuronrobotics.sdk.addons.kinematics.DHLink.fireOnLinkGlobalPositionChange(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.removeDhLinkPositionListener().
◆ listener
|
private |
The listener.
Definition at line 56 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getListener(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setListener().
◆ newLinkConf
|
private |
Definition at line 70 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DHLink(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setAlpha(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setDelta(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setRadius(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setTheta().
◆ radius
|
private |
The radius.
Definition at line 26 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getRadius(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getXml(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setRadius().
◆ root
|
private |
The root.
Definition at line 59 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getRootListener().
◆ rotX
|
private |
The rot x.
Definition at line 35 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotX(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setAlpha(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setRotX().
◆ rotX_J
|
private |
The rot x_ j.
Definition at line 47 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotX_J(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setAlpha().
◆ rotZ
|
private |
The rot z.
Definition at line 41 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotZ(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setMatrix().
◆ rotZ_J
|
private |
The rot z_ j.
Definition at line 53 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getRotZ_J(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setJacobianMatrix().
◆ slaveMobileBase
|
private |
The embedable xml.
Definition at line 68 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.fireOnLinkGlobalPositionChange(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.getSlaveMobileBase().
◆ theta
|
private |
The theta.
Definition at line 23 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getTheta(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getXml(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setTheta().
◆ transX
|
private |
The trans x.
Definition at line 32 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransX(), com.neuronrobotics.sdk.addons.kinematics.DHLink.setRadius(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setTransX().
◆ transX_J
|
private |
The trans x_ j.
Definition at line 44 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransX_J(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setRadius().
◆ transZ
|
private |
The trans z.
Definition at line 38 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransZ(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setMatrix().
◆ transZ_J
|
private |
The trans z_ j.
Definition at line 50 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.getTransZ_J(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setJacobianMatrix().
◆ type
|
private |
The type.
Definition at line 62 of file DHLink.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStep(), com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverse(), com.neuronrobotics.sdk.addons.kinematics.DHLink.getLinkType(), and com.neuronrobotics.sdk.addons.kinematics.DHLink.setLinkType().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/DHLink.java