
Public Member Functions | |
| GcodeDevice (NRSerialPort serial) | |
| AbstractLink | getHeater (LinkConfiguration axis) |
| AbstractLink | getLink (LinkConfiguration axis) |
| void | disconnectDeviceImp () |
| boolean | connectDeviceImp () |
| ArrayList< String > | getNamespacesImp () |
| String | runLine (String line) |
| void | runFile (File gcode) |
| int | getTimeoutMs () |
| void | setTimeoutMs (int timeoutMs) |
| GCodeDeviceConfiguration | getConfiguration () |
| void | flush (double seconds) |
| void | loadCurrent () |
 Public Member Functions inherited from com.neuronrobotics.sdk.common.NonBowlerDevice Public Member Functions inherited from com.neuronrobotics.sdk.common.NonBowlerDevice | |
| boolean | connect () |
| boolean | isAvailable () throws InvalidConnectionException |
| void | disconnect () |
| void | onAsyncResponse (BowlerDatagram data) |
| ArrayList< String > | getNamespaces () |
| Public Member Functions inherited from com.neuronrobotics.sdk.common.BowlerAbstractDevice | |
| void | addConnectionEventListener (final IDeviceConnectionEventListener l) |
| void | removeConnectionEventListener (IDeviceConnectionEventListener l) |
| void | setConnection (BowlerAbstractConnection connection) |
| BowlerAbstractConnection | getConnection () |
| void | setAddress (MACAddress address) |
| MACAddress | getAddress () |
| BowlerDatagram | send (BowlerAbstractCommand command) throws NoConnectionAvailableException, InvalidResponseException |
| BowlerDatagram | send (BowlerAbstractCommand command, int retry) throws NoConnectionAvailableException, InvalidResponseException |
| Object[] | send (String namespace, BowlerMethod method, String rpcString, Object[] arguments, int retry) throws DeviceConnectionException |
| Object[] | send (String namespace, BowlerMethod method, String rpcString, Object[] arguments) throws DeviceConnectionException |
| boolean | ping () |
| boolean | ping (boolean switchParser) |
| ArrayList< ByteList > | getRevisions () |
| boolean | hasNamespace (String string) |
| void | startHeartBeat () |
| void | startHeartBeat (long msHeartBeatTime) |
| void | stopHeartBeat () |
| void | setThreadedUpstreamPackets (boolean up) |
| ArrayList< RpcEncapsulation > | getRpcList (String namespace) |
| void | loadRpcList () |
| void | onAllResponse (BowlerDatagram data) |
| boolean | isKeepAlive () |
| void | setKeepAlive (boolean keepAlive) |
| long | getLastPacketTime () |
| void | setLastPacketTime (long lastPacketTime) |
| String | getScriptingName () |
| void | setScriptingName (String scriptingName) |
| ArrayList< IDeviceConnectionEventListener > | getDisconnectListeners () |
Private Member Functions | |
| String | getLine () |
Private Attributes | |
| NRSerialPort | serial |
| DataInputStream | ins =null |
| DataOutputStream | outs =null |
| int | timeoutMs = 1000 |
| GCodeDeviceConfiguration | config = new GCodeDeviceConfiguration() |
| HashMap< LinkConfiguration, IGCodeChannel > | links = new HashMap<LinkConfiguration,IGCodeChannel>() |
| AbstractLink | heater =null |
| AbstractLink | bed =null |
Static Private Attributes | |
| static final String | tool = LinkType.GCODE_STEPPER_TOOL.getName() |
| static final String | rot = LinkType.GCODE_STEPPER_ROTORY.getName() |
| static final String | pris = LinkType.GCODE_STEPPER_PRISMATIC.getName() |
Additional Inherited Members | |
| Protected Member Functions inherited from com.neuronrobotics.sdk.common.BowlerAbstractDevice | |
| void | fireDisconnectEvent () |
| void | fireConnectEvent () |
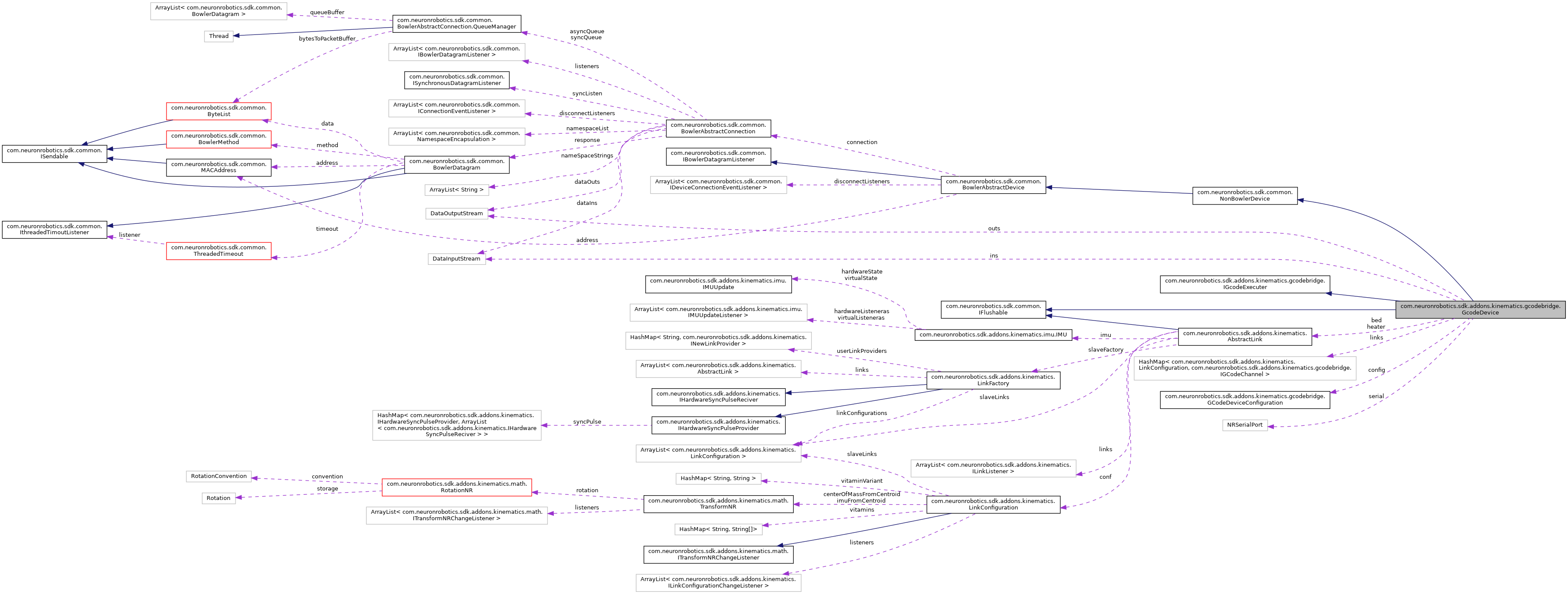
Detailed Description
Definition at line 25 of file GcodeDevice.java.
Constructor & Destructor Documentation
◆ GcodeDevice()
| com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.GcodeDevice | ( | NRSerialPort | serial | ) |
Definition at line 44 of file GcodeDevice.java.
References com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.serial.
Member Function Documentation
◆ connectDeviceImp()
| boolean com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.connectDeviceImp | ( | ) |
Connect device imp.
- Returns
- true, if successful
Reimplemented from com.neuronrobotics.sdk.common.NonBowlerDevice.
Definition at line 160 of file GcodeDevice.java.
References com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.disconnectDeviceImp(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.ins, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.outs, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.runLine(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.serial.

◆ disconnectDeviceImp()
| void com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.disconnectDeviceImp | ( | ) |
This method tells the connection object to disconnect its pipes and close out the connection. Once this is called, it is safe to remove your device.
Reimplemented from com.neuronrobotics.sdk.common.NonBowlerDevice.
Definition at line 127 of file GcodeDevice.java.
References com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getLine(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.ins, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.outs, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.runLine(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.serial.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.connectDeviceImp().

◆ flush()
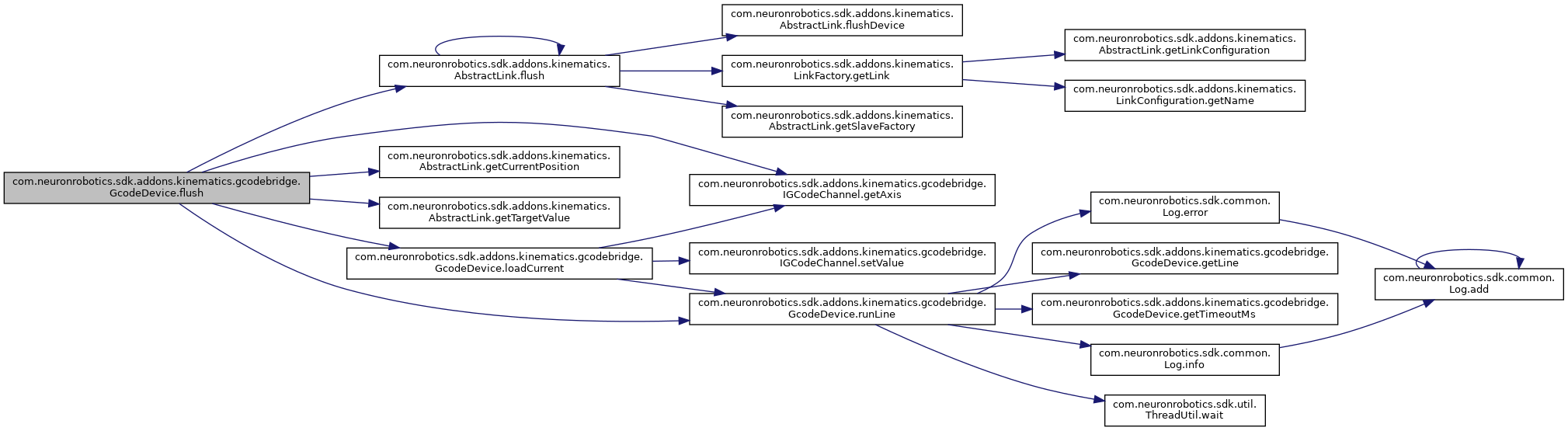
| void com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.flush | ( | double | seconds | ) |
This interface says the device can cache values and flush them in one push
- Parameters
-
seconds the duration of the flush, from current position and time to cached positions in this many seconds
Implements com.neuronrobotics.sdk.common.IFlushable.
Definition at line 242 of file GcodeDevice.java.
References com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.bed, com.neuronrobotics.sdk.addons.kinematics.AbstractLink.flush(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.IGCodeChannel.getAxis(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getCurrentPosition(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getTargetValue(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.heater, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.links, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.loadCurrent(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.runLine().
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GCodeHeater.flushAllDevice(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodePrismatic.flushAllDevice(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeRotory.flushAllDevice().
◆ getConfiguration()
| GCodeDeviceConfiguration com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getConfiguration | ( | ) |
Return the configuration of the gcode device.
- Returns
Implements com.neuronrobotics.sdk.addons.kinematics.gcodebridge.IGcodeExecuter.
Definition at line 237 of file GcodeDevice.java.
References com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.config.
◆ getHeater()
| AbstractLink com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getHeater | ( | LinkConfiguration | axis | ) |
Definition at line 48 of file GcodeDevice.java.
References com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.bed, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.heater.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal().

◆ getLine()
|
private |
Definition at line 177 of file GcodeDevice.java.
References com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.ins.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.disconnectDeviceImp(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.runLine().
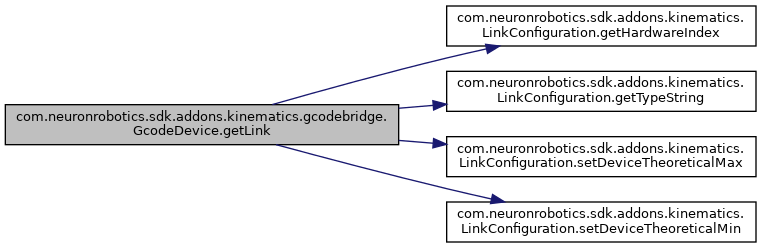
◆ getLink()
| AbstractLink com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getLink | ( | LinkConfiguration | axis | ) |
Definition at line 66 of file GcodeDevice.java.
References com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getHardwareIndex(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getTypeString(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.links, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.pris, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.rot, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMax(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMin(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.tool.
Referenced by com.neuronrobotics.sdk.addons.kinematics.LinkFactory.getLinkLocal().
◆ getNamespacesImp()
| ArrayList<String> com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getNamespacesImp | ( | ) |
Gets the namespaces imp.
- Returns
- the namespaces imp
Reimplemented from com.neuronrobotics.sdk.common.NonBowlerDevice.
Definition at line 172 of file GcodeDevice.java.
◆ getTimeoutMs()
| int com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getTimeoutMs | ( | ) |
Definition at line 228 of file GcodeDevice.java.
References com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.timeoutMs.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.runLine().
◆ loadCurrent()
| void com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.loadCurrent | ( | ) |
System.out.println("Found axis = "+s);
Definition at line 262 of file GcodeDevice.java.
References com.neuronrobotics.sdk.addons.kinematics.gcodebridge.IGCodeChannel.getAxis(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.links, com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.runLine(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.IGCodeChannel.setValue().
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.flush(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodePrismatic.loadCurrent(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeRotory.loadCurrent().

◆ runFile()
| void com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.runFile | ( | File | gcode | ) |
Run all the lines in a file
- Parameters
-
gcode
Implements com.neuronrobotics.sdk.addons.kinematics.gcodebridge.IGcodeExecuter.
Definition at line 223 of file GcodeDevice.java.
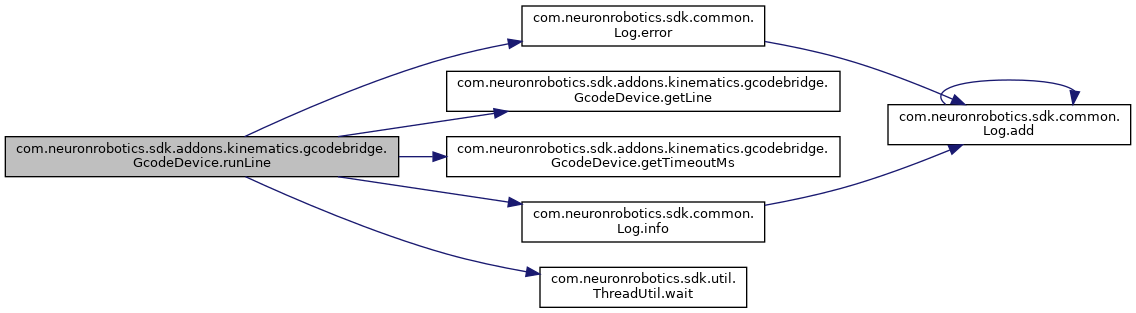
◆ runLine()
| String com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.runLine | ( | String | line | ) |
Execute a single line of gcode
- Parameters
-
line
- Returns
Implements com.neuronrobotics.sdk.addons.kinematics.gcodebridge.IGcodeExecuter.
Definition at line 194 of file GcodeDevice.java.
References com.neuronrobotics.sdk.common.Log.error(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getLine(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getTimeoutMs(), com.neuronrobotics.sdk.common.Log.info(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.outs, and com.neuronrobotics.sdk.util.ThreadUtil.wait().
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.connectDeviceImp(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.disconnectDeviceImp(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.flush(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GCodeHeater.flushDevice(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodePrismatic.flushDevice(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeRotory.flushDevice(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.loadCurrent().
◆ setTimeoutMs()
| void com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.setTimeoutMs | ( | int | timeoutMs | ) |
Definition at line 232 of file GcodeDevice.java.
References com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.timeoutMs.
Member Data Documentation
◆ bed
|
private |
Definition at line 41 of file GcodeDevice.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.flush(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getHeater().
◆ config
|
private |
Definition at line 38 of file GcodeDevice.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getConfiguration().
◆ heater
|
private |
Definition at line 40 of file GcodeDevice.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.flush(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getHeater().
◆ ins
|
private |
Definition at line 35 of file GcodeDevice.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.connectDeviceImp(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.disconnectDeviceImp(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getLine().
◆ links
|
private |
◆ outs
|
private |
Definition at line 36 of file GcodeDevice.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.connectDeviceImp(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.disconnectDeviceImp(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.runLine().
◆ pris
|
staticprivate |
Definition at line 31 of file GcodeDevice.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getLink().
◆ rot
|
staticprivate |
Definition at line 29 of file GcodeDevice.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getLink().
◆ serial
|
private |
Definition at line 33 of file GcodeDevice.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.connectDeviceImp(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.disconnectDeviceImp(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.GcodeDevice().
◆ timeoutMs
|
private |
Definition at line 37 of file GcodeDevice.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getTimeoutMs(), and com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.setTimeoutMs().
◆ tool
|
staticprivate |
Definition at line 27 of file GcodeDevice.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.getLink().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/gcodebridge/GcodeDevice.java