
Public Member Functions | |
| MobileBasePhysicsManager (MobileBase base, ArrayList< CSG > baseCad, HashMap< LinkConfiguration, ArrayList< CSG >> simplecad) | |
| MobileBasePhysicsManager (MobileBase base, ArrayList< CSG > baseCad, HashMap< LinkConfiguration, ArrayList< CSG >> simplecad, PhysicsCore core) | |
| void | clear () |
Static Public Attributes | |
| static final float | PhysicsGravityScalar = 6 |
| static final float | LIFT_EPS = (float) Math.toRadians(0.1) |
Private Member Functions | |
| IPhysicsUpdate | getUpdater (RigidBody body, IMU base) |
Private Attributes | |
| HashMap< LinkConfiguration, ArrayList< CSG > > | simplecad |
| float | lift = 0 |
| ArrayList< ILinkListener > | linkListeners = new ArrayList<>() |
Detailed Description
Definition at line 39 of file MobileBasePhysicsManager.java.
Constructor & Destructor Documentation
◆ MobileBasePhysicsManager() [1/2]
| com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager | ( | MobileBase | base, |
| ArrayList< CSG > | baseCad, | ||
| HashMap< LinkConfiguration, ArrayList< CSG >> | simplecad | ||
| ) |
Definition at line 95 of file MobileBasePhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsEngine.get(), and com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.simplecad.

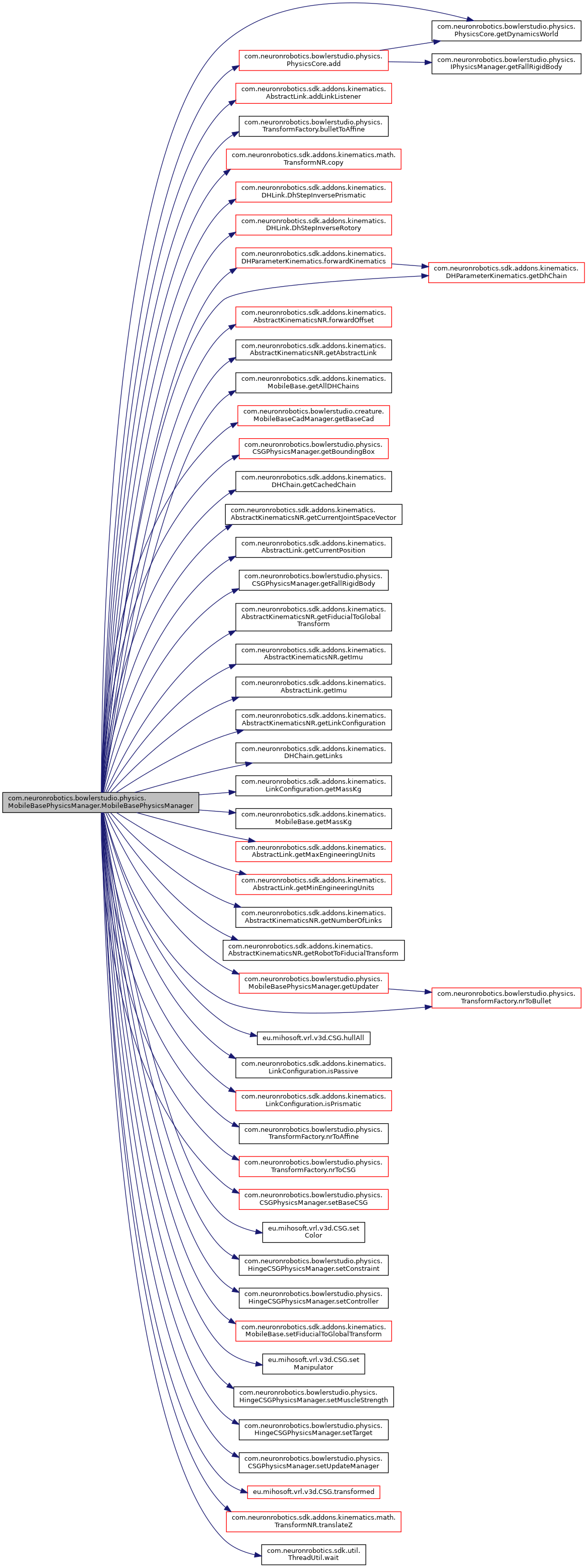
◆ MobileBasePhysicsManager() [2/2]
| com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager | ( | MobileBase | base, |
| ArrayList< CSG > | baseCad, | ||
| HashMap< LinkConfiguration, ArrayList< CSG >> | simplecad, | ||
| PhysicsCore | core | ||
| ) |
Definition at line 100 of file MobileBasePhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.add(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.addLinkListener(), com.neuronrobotics.bowlerstudio.physics.TransformFactory.bulletToAffine(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.copy(), com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInversePrismatic(), com.neuronrobotics.sdk.addons.kinematics.DHLink.DhStepInverseRotory(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.forwardKinematics(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.forwardOffset(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getAbstractLink(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getAllDHChains(), com.neuronrobotics.bowlerstudio.creature.MobileBaseCadManager.getBaseCad(), com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getBoundingBox(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getCachedChain(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getCurrentJointSpaceVector(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getCurrentPosition(), com.neuronrobotics.sdk.addons.kinematics.DHParameterKinematics.getDhChain(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getDynamicsWorld(), com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getFallRigidBody(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getFiducialToGlobalTransform(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getImu(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getImu(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getLinkConfiguration(), com.neuronrobotics.sdk.addons.kinematics.DHChain.getLinks(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.getMassKg(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.getMassKg(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMinEngineeringUnits(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getNumberOfLinks(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.getRobotToFiducialTransform(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.getUpdater(), eu.mihosoft.vrl.v3d.CSG.hullAll(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isPassive(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.isPrismatic(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.lift, com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.linkListeners, com.neuronrobotics.bowlerstudio.physics.TransformFactory.nrToAffine(), com.neuronrobotics.bowlerstudio.physics.TransformFactory.nrToBullet(), com.neuronrobotics.bowlerstudio.physics.TransformFactory.nrToCSG(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.PhysicsGravityScalar, com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setBaseCSG(), eu.mihosoft.vrl.v3d.CSG.setColor(), com.neuronrobotics.bowlerstudio.physics.HingeCSGPhysicsManager.setConstraint(), com.neuronrobotics.bowlerstudio.physics.HingeCSGPhysicsManager.setController(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.setFiducialToGlobalTransform(), eu.mihosoft.vrl.v3d.CSG.setManipulator(), com.neuronrobotics.bowlerstudio.physics.HingeCSGPhysicsManager.setMuscleStrength(), com.neuronrobotics.bowlerstudio.physics.HingeCSGPhysicsManager.setTarget(), com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setUpdateManager(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.simplecad, eu.mihosoft.vrl.v3d.CSG.transformed(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.translateZ(), and com.neuronrobotics.sdk.util.ThreadUtil.wait().
Member Function Documentation
◆ clear()
| void com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.clear | ( | ) |
Definition at line 317 of file MobileBasePhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.linkListeners, and com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.simplecad.
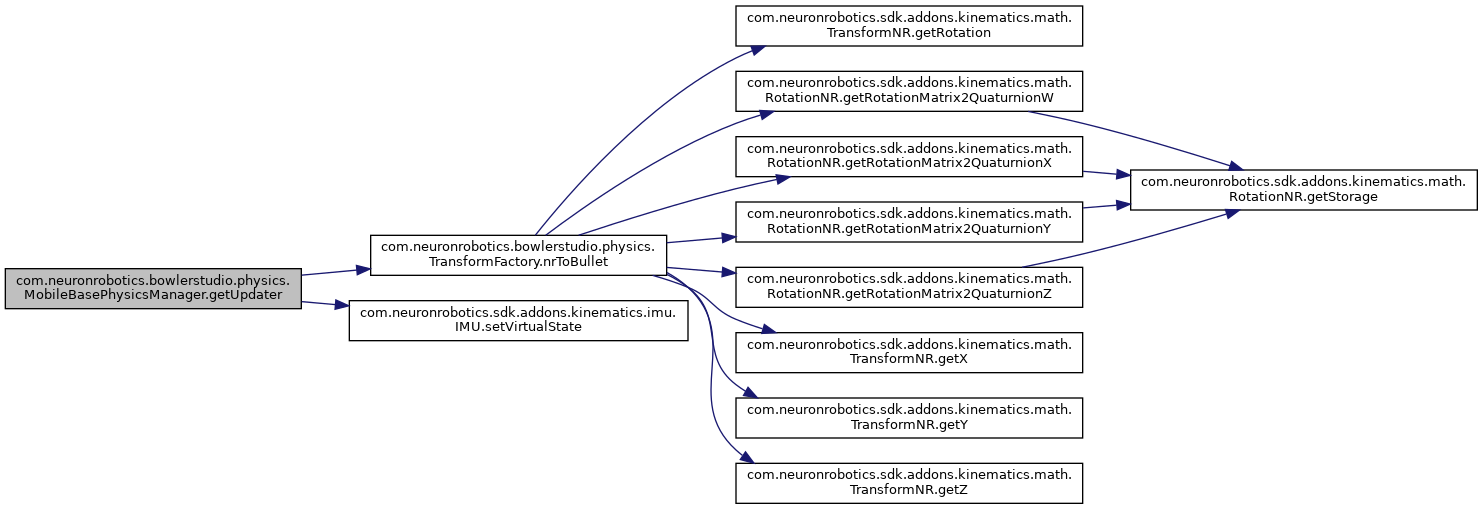
◆ getUpdater()
|
private |
Definition at line 47 of file MobileBasePhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.TransformFactory.nrToBullet(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.PhysicsGravityScalar, and com.neuronrobotics.sdk.addons.kinematics.imu.IMU.setVirtualState().
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().
Member Data Documentation
◆ lift
|
private |
Definition at line 43 of file MobileBasePhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().
◆ LIFT_EPS
|
static |
Definition at line 45 of file MobileBasePhysicsManager.java.
◆ linkListeners
|
private |
Definition at line 44 of file MobileBasePhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.clear(), and com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().
◆ PhysicsGravityScalar
|
static |
Definition at line 41 of file MobileBasePhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.getUpdater(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.PhysicsCore().
◆ simplecad
|
private |
Definition at line 42 of file MobileBasePhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.clear(), and com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().
The documentation for this class was generated from the following file:
- src/main/java/com/neuronrobotics/bowlerstudio/physics/MobileBasePhysicsManager.java