Public Member Functions | |
| PhysicsCore () throws Exception | |
| BroadphaseInterface | getBroadphase () |
| void | setBroadphase (BroadphaseInterface broadphase) |
| DefaultCollisionConfiguration | getCollisionConfiguration () |
| void | setCollisionConfiguration (DefaultCollisionConfiguration collisionConfiguration) |
| CollisionDispatcher | getDispatcher () |
| void | setDispatcher (CollisionDispatcher dispatcher) |
| SequentialImpulseConstraintSolver | getSolver () |
| void | setSolver (SequentialImpulseConstraintSolver solver) |
| DiscreteDynamicsWorld | getDynamicsWorld () |
| void | setDynamicsWorld (DiscreteDynamicsWorld dynamicsWorld) |
| CollisionShape | getGroundShape () |
| void | setGroundShape (CollisionShape cs) |
| ArrayList< IPhysicsManager > | getPhysicsObjects () |
| void | setDamping (float lin_damping, float ang_damping) |
| void | setSleepingThresholds (float linearSleepThreshhold, float angularSleepThreshhold) |
| void | setDeactivationTime (float deactivationTime) |
| void | setObjects (ArrayList< IPhysicsManager > objects) |
| void | startPhysicsThread (int ms) |
| ArrayList< CSG > | getCsgFromEngine () |
| void | stopPhysicsThread () |
| void | step (float timeStep) |
| void | stepMs (double timeStep) |
| void | add (IPhysicsManager manager) |
| void | remove (IPhysicsManager manager) |
| void | clear () |
| int | getSimulationSubSteps () |
| float | getDeactivationTime () |
| void | setSimulationSubSteps (int simpulationSubSteps) |
| float | getLin_damping () |
| float | getAng_damping () |
| float | getLinearSleepThreshhold () |
| float | getAngularSleepThreshhold () |
Private Attributes | |
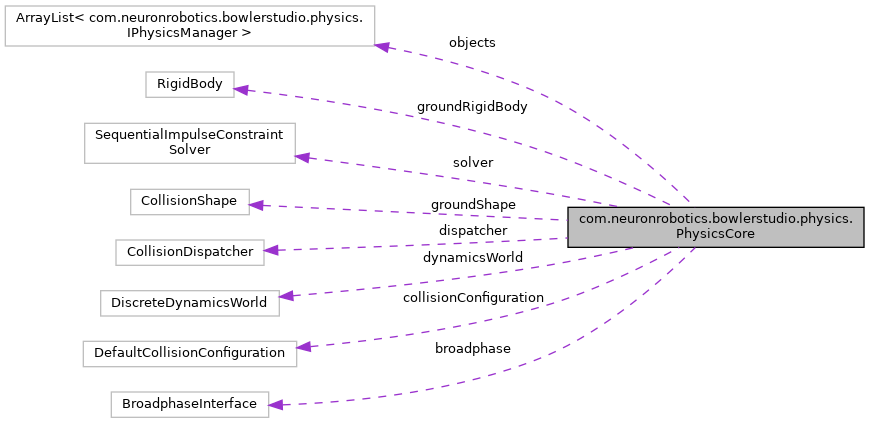
| BroadphaseInterface | broadphase = new DbvtBroadphase() |
| DefaultCollisionConfiguration | collisionConfiguration = new DefaultCollisionConfiguration() |
| CollisionDispatcher | dispatcher = new CollisionDispatcher(collisionConfiguration) |
| SequentialImpulseConstraintSolver | solver = new SequentialImpulseConstraintSolver() |
| DiscreteDynamicsWorld | dynamicsWorld |
| CollisionShape | groundShape = null |
| ArrayList< IPhysicsManager > | objects = new ArrayList<>() |
| RigidBody | groundRigidBody |
| boolean | runEngine = false |
| int | msTime = 16 |
| Thread | physicsThread = null |
| int | simulationSubSteps = 5 |
| float | lin_damping |
| float | ang_damping |
| float | linearSleepThreshhold |
| float | angularSleepThreshhold |
| float | deactivationTime |
Detailed Description
Definition at line 28 of file PhysicsCore.java.
Constructor & Destructor Documentation
◆ PhysicsCore()
| com.neuronrobotics.bowlerstudio.physics.PhysicsCore.PhysicsCore | ( | ) | throws Exception |
Definition at line 56 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getDynamicsWorld(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.PhysicsGravityScalar, and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setGroundShape().

Member Function Documentation
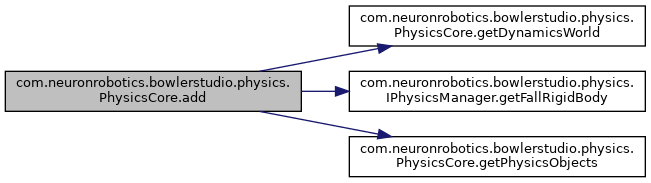
◆ add()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.add | ( | IPhysicsManager | manager | ) |
Definition at line 224 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getDynamicsWorld(), com.neuronrobotics.bowlerstudio.physics.IPhysicsManager.getFallRigidBody(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getPhysicsObjects().
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), and com.neuronrobotics.bowlerstudio.physics.HingeCSGPhysicsManager.update().
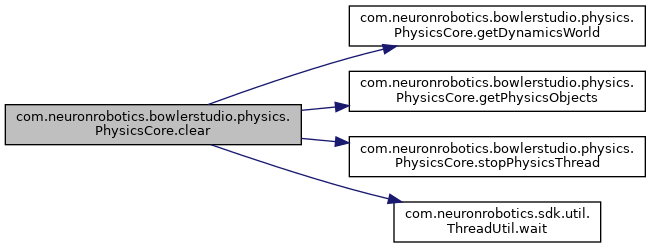
◆ clear()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.clear | ( | ) |
Definition at line 264 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getDynamicsWorld(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getPhysicsObjects(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.msTime, com.neuronrobotics.bowlerstudio.physics.PhysicsCore.stopPhysicsThread(), and com.neuronrobotics.sdk.util.ThreadUtil.wait().
◆ getAng_damping()
| float com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getAng_damping | ( | ) |
Definition at line 302 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.ang_damping.
◆ getAngularSleepThreshhold()
| float com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getAngularSleepThreshhold | ( | ) |
Definition at line 310 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.angularSleepThreshhold.
◆ getBroadphase()
| BroadphaseInterface com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getBroadphase | ( | ) |
Definition at line 64 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.broadphase.
◆ getCollisionConfiguration()
| DefaultCollisionConfiguration com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getCollisionConfiguration | ( | ) |
Definition at line 72 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.collisionConfiguration.
◆ getCsgFromEngine()
| ArrayList<CSG> com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getCsgFromEngine | ( | ) |
Definition at line 183 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getPhysicsObjects().
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsEngine.getCsgFromEngine().

◆ getDeactivationTime()
| float com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getDeactivationTime | ( | ) |
Definition at line 290 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.deactivationTime.
◆ getDispatcher()
| CollisionDispatcher com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getDispatcher | ( | ) |
Definition at line 80 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.dispatcher.
◆ getDynamicsWorld()
| DiscreteDynamicsWorld com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getDynamicsWorld | ( | ) |
Definition at line 96 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.dynamicsWorld.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.add(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.clear(), com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.PhysicsCore(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.remove(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setGroundShape(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.step(), and com.neuronrobotics.bowlerstudio.physics.VehicleCSGPhysicsManager.VehicleCSGPhysicsManager().
◆ getGroundShape()
| CollisionShape com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getGroundShape | ( | ) |
Definition at line 104 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.groundShape.
◆ getLin_damping()
| float com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getLin_damping | ( | ) |
Definition at line 298 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.lin_damping.
◆ getLinearSleepThreshhold()
| float com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getLinearSleepThreshhold | ( | ) |
Definition at line 306 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.linearSleepThreshhold.
◆ getPhysicsObjects()
| ArrayList<IPhysicsManager> com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getPhysicsObjects | ( | ) |
Definition at line 126 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.objects.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.add(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.clear(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getCsgFromEngine(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.remove(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setDamping(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setDeactivationTime(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setSleepingThresholds(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.step().
◆ getSimulationSubSteps()
| int com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getSimulationSubSteps | ( | ) |
Definition at line 286 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.simulationSubSteps.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.step().
◆ getSolver()
| SequentialImpulseConstraintSolver com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getSolver | ( | ) |
Definition at line 88 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.solver.
◆ remove()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.remove | ( | IPhysicsManager | manager | ) |
Definition at line 244 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getDynamicsWorld(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getPhysicsObjects().
Referenced by com.neuronrobotics.bowlerstudio.physics.HingeCSGPhysicsManager.update().

◆ setBroadphase()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setBroadphase | ( | BroadphaseInterface | broadphase | ) |
Definition at line 68 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.broadphase.
◆ setCollisionConfiguration()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setCollisionConfiguration | ( | DefaultCollisionConfiguration | collisionConfiguration | ) |
Definition at line 76 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.collisionConfiguration.
◆ setDamping()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setDamping | ( | float | lin_damping, |
| float | ang_damping | ||
| ) |
Definition at line 130 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.ang_damping, com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getPhysicsObjects(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.lin_damping.

◆ setDeactivationTime()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setDeactivationTime | ( | float | deactivationTime | ) |
Definition at line 146 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.deactivationTime, and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getPhysicsObjects().

◆ setDispatcher()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setDispatcher | ( | CollisionDispatcher | dispatcher | ) |
Definition at line 84 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.dispatcher.
◆ setDynamicsWorld()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setDynamicsWorld | ( | DiscreteDynamicsWorld | dynamicsWorld | ) |
Definition at line 100 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.dynamicsWorld.
◆ setGroundShape()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setGroundShape | ( | CollisionShape | cs | ) |
Definition at line 108 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.dynamicsWorld, com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getDynamicsWorld(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.groundRigidBody, and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.groundShape.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.PhysicsCore().

◆ setObjects()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setObjects | ( | ArrayList< IPhysicsManager > | objects | ) |
Definition at line 153 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.objects.
◆ setSimulationSubSteps()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setSimulationSubSteps | ( | int | simpulationSubSteps | ) |
Definition at line 294 of file PhysicsCore.java.
◆ setSleepingThresholds()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setSleepingThresholds | ( | float | linearSleepThreshhold, |
| float | angularSleepThreshhold | ||
| ) |
Definition at line 138 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.angularSleepThreshhold, com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getPhysicsObjects(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.linearSleepThreshhold.

◆ setSolver()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setSolver | ( | SequentialImpulseConstraintSolver | solver | ) |
Definition at line 92 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.solver.
◆ startPhysicsThread()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.startPhysicsThread | ( | int | ms | ) |
Definition at line 157 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.msTime, com.neuronrobotics.bowlerstudio.physics.PhysicsCore.physicsThread, com.neuronrobotics.bowlerstudio.physics.PhysicsCore.runEngine, com.neuronrobotics.bowlerstudio.physics.PhysicsCore.stepMs(), and com.neuronrobotics.sdk.util.ThreadUtil.wait().

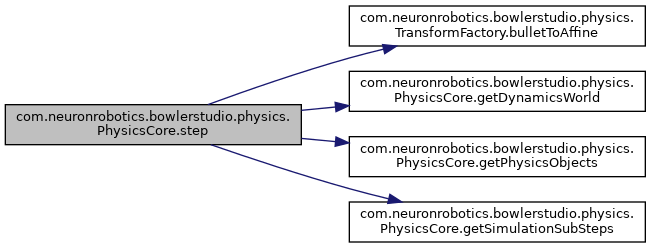
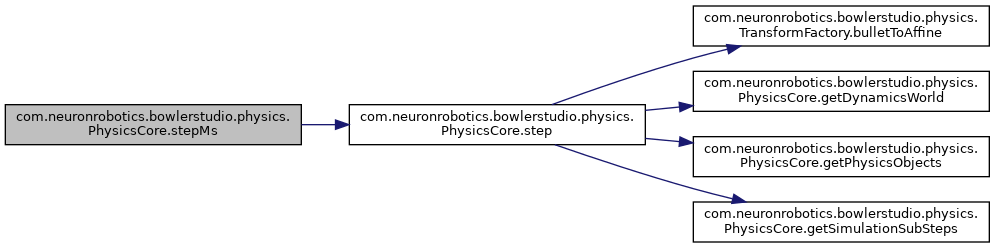
◆ step()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.step | ( | float | timeStep | ) |
Definition at line 198 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.TransformFactory.bulletToAffine(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getDynamicsWorld(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getPhysicsObjects(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getSimulationSubSteps().
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.stepMs().
◆ stepMs()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.stepMs | ( | double | timeStep | ) |
Definition at line 220 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.step().
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.startPhysicsThread().
◆ stopPhysicsThread()
| void com.neuronrobotics.bowlerstudio.physics.PhysicsCore.stopPhysicsThread | ( | ) |
Definition at line 193 of file PhysicsCore.java.
References com.neuronrobotics.bowlerstudio.physics.PhysicsCore.physicsThread, and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.runEngine.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.clear().
Member Data Documentation
◆ ang_damping
|
private |
Definition at line 51 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getAng_damping(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setDamping().
◆ angularSleepThreshhold
|
private |
Definition at line 53 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getAngularSleepThreshhold(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setSleepingThresholds().
◆ broadphase
|
private |
Definition at line 30 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getBroadphase(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setBroadphase().
◆ collisionConfiguration
|
private |
Definition at line 31 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getCollisionConfiguration(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setCollisionConfiguration().
◆ deactivationTime
|
private |
Definition at line 54 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getDeactivationTime(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setDeactivationTime().
◆ dispatcher
|
private |
Definition at line 32 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getDispatcher(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setDispatcher().
◆ dynamicsWorld
|
private |
Definition at line 36 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getDynamicsWorld(), com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setDynamicsWorld(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setGroundShape().
◆ groundRigidBody
|
private |
Definition at line 43 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setGroundShape().
◆ groundShape
|
private |
Definition at line 40 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getGroundShape(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setGroundShape().
◆ lin_damping
|
private |
Definition at line 50 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getLin_damping(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setDamping().
◆ linearSleepThreshhold
|
private |
Definition at line 52 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getLinearSleepThreshhold(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setSleepingThresholds().
◆ msTime
|
private |
Definition at line 46 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.clear(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.startPhysicsThread().
◆ objects
|
private |
Definition at line 42 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getPhysicsObjects(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setObjects().
◆ physicsThread
|
private |
Definition at line 48 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.startPhysicsThread(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.stopPhysicsThread().
◆ runEngine
|
private |
Definition at line 45 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.startPhysicsThread(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.stopPhysicsThread().
◆ simulationSubSteps
|
private |
Definition at line 49 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getSimulationSubSteps().
◆ solver
|
private |
Definition at line 34 of file PhysicsCore.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.PhysicsCore.getSolver(), and com.neuronrobotics.bowlerstudio.physics.PhysicsCore.setSolver().
The documentation for this class was generated from the following file:
- src/main/java/com/neuronrobotics/bowlerstudio/physics/PhysicsCore.java