
Public Member Functions | |
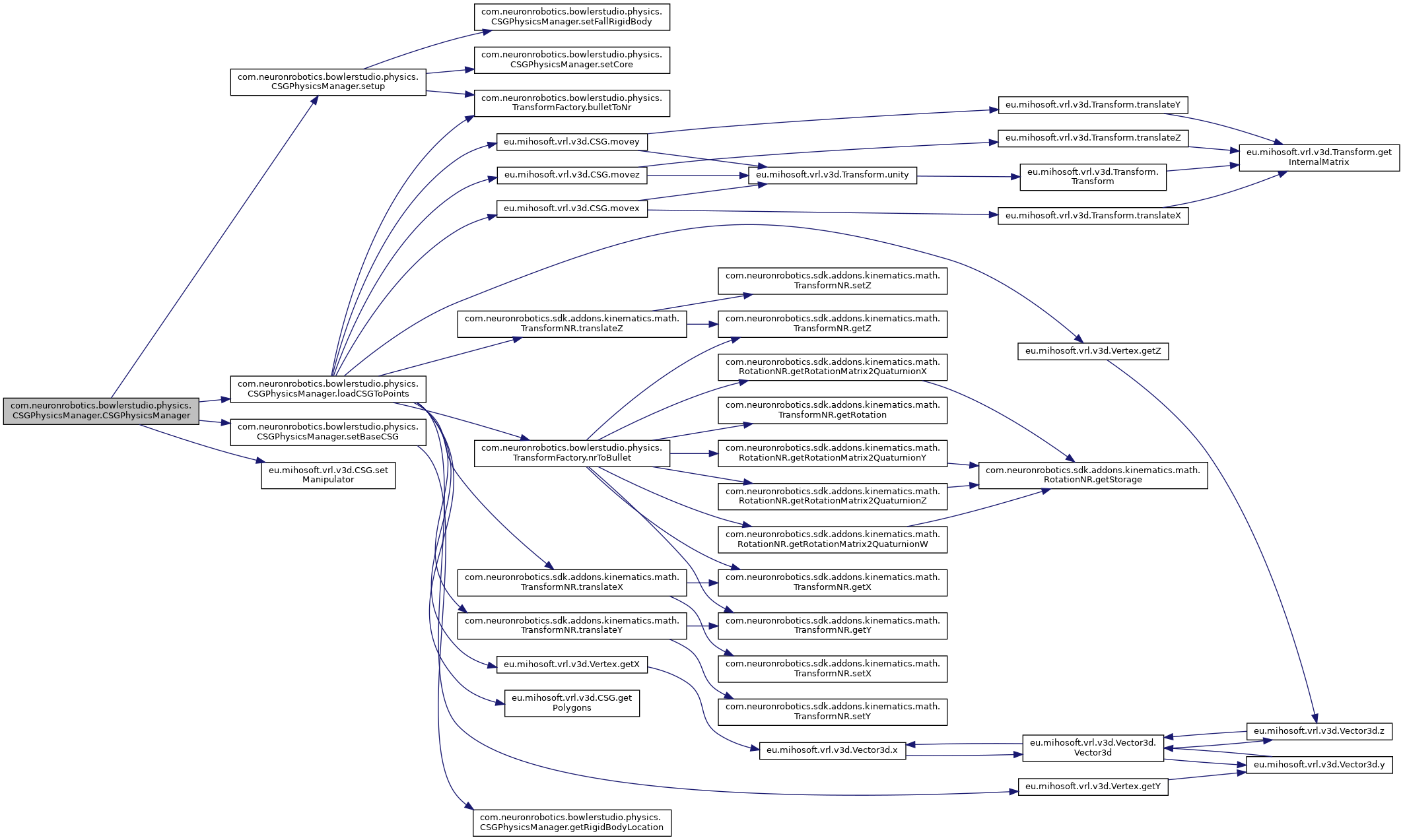
| CSGPhysicsManager (List< CSG > baseCSG, Transform pose, double mass, boolean adjustCenter, PhysicsCore core) | |
| CSGPhysicsManager (ArrayList< CSG > baseCSG, Vector3f start, double mass, PhysicsCore core) | |
| void | setup (CollisionShape fallShape, Transform pose, double mass, PhysicsCore core) |
| void | update (float timeStep) |
| RigidBody | getFallRigidBody () |
| void | setFallRigidBody (RigidBody fallRigidBody) |
| List< CSG > | getBaseCSG () |
| void | setBaseCSG (List< CSG > baseCSG) |
| Transform | getUpdateTransform () |
| Affine | getRigidBodyLocation () |
| IPhysicsUpdate | getUpdateManager () |
| void | setUpdateManager (IPhysicsUpdate updateManager) |
| PhysicsCore | getCore () |
| void | setCore (PhysicsCore core) |
Static Public Member Functions | |
| static CSG | getBoundingBox (CSG incoming) |
Protected Member Functions | |
| CSG | loadCSGToPoints (CSG baseCSG, boolean adjustCenter, Transform pose, ObjectArrayList< Vector3f > arg0) |
Protected Attributes | |
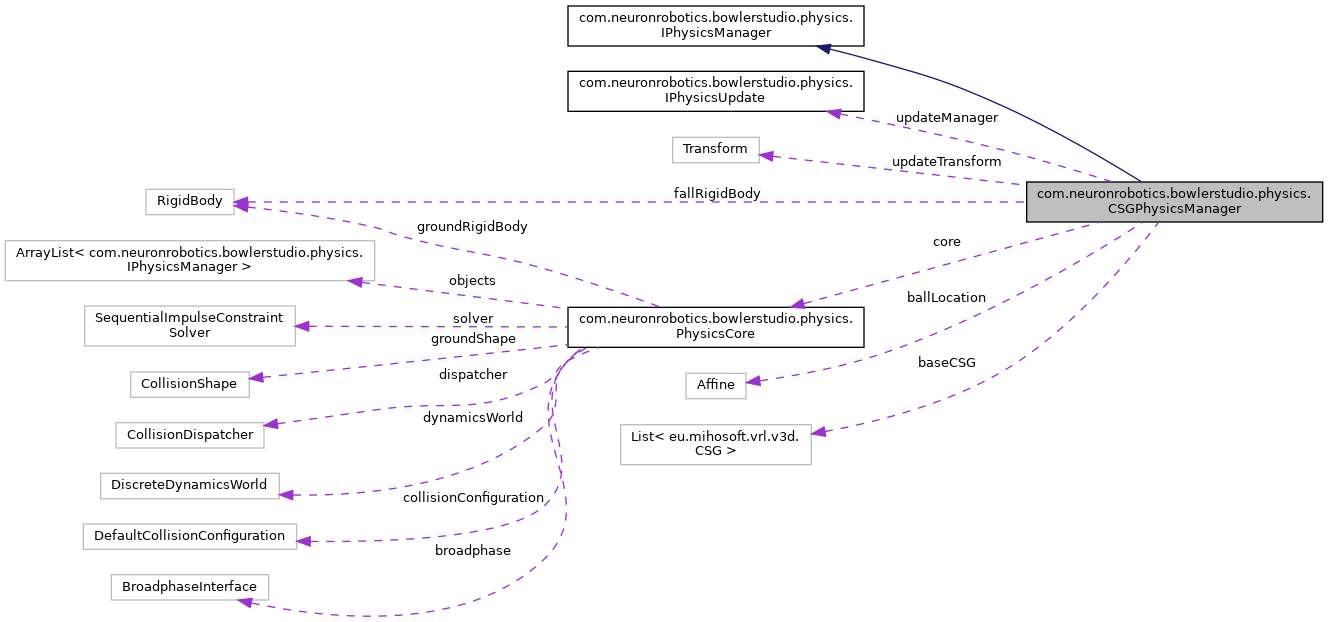
| List< CSG > | baseCSG = null |
Private Attributes | |
| RigidBody | fallRigidBody |
| final Affine | ballLocation = new Affine() |
| Transform | updateTransform = new Transform() |
| IPhysicsUpdate | updateManager = null |
| PhysicsCore | core |
Detailed Description
Definition at line 30 of file CSGPhysicsManager.java.
Constructor & Destructor Documentation
◆ CSGPhysicsManager() [1/2]
| com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.CSGPhysicsManager | ( | List< CSG > | baseCSG, |
| Transform | pose, | ||
| double | mass, | ||
| boolean | adjustCenter, | ||
| PhysicsCore | core | ||
| ) |
Definition at line 39 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.baseCSG, com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.core, com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.loadCSGToPoints(), com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setBaseCSG(), eu.mihosoft.vrl.v3d.CSG.setManipulator(), and com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setup().
◆ CSGPhysicsManager() [2/2]
| com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.CSGPhysicsManager | ( | ArrayList< CSG > | baseCSG, |
| Vector3f | start, | ||
| double | mass, | ||
| PhysicsCore | core | ||
| ) |
Definition at line 54 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.baseCSG, and com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.core.
Member Function Documentation
◆ getBaseCSG()
| List<CSG> com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getBaseCSG | ( | ) |
Return the CSG that tis being modelsed
Implements com.neuronrobotics.bowlerstudio.physics.IPhysicsManager.
Definition at line 143 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.baseCSG.
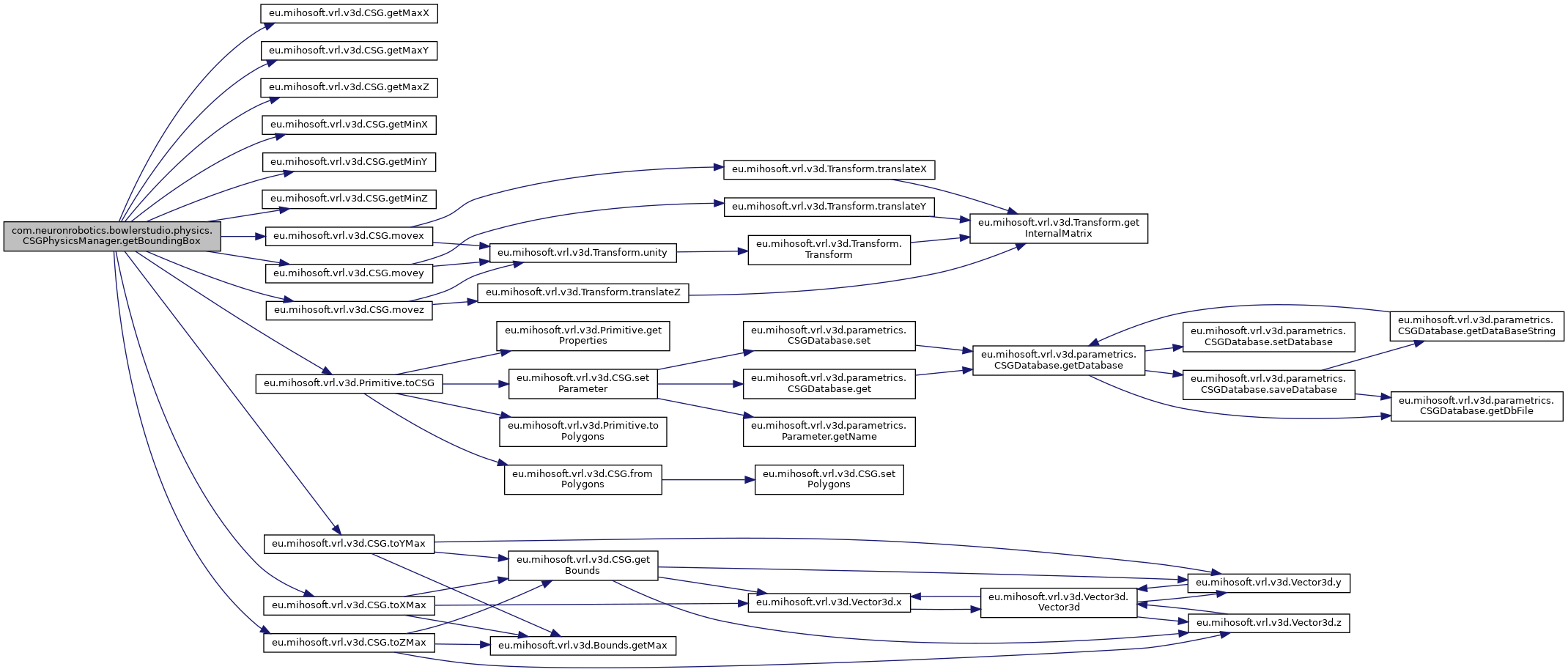
◆ getBoundingBox()
|
static |
Get Bounding box
- Returns
- A CSG that completely encapsulates the base CSG, centered around it
Definition at line 98 of file CSGPhysicsManager.java.
References eu.mihosoft.vrl.v3d.CSG.getMaxX(), eu.mihosoft.vrl.v3d.CSG.getMaxY(), eu.mihosoft.vrl.v3d.CSG.getMaxZ(), eu.mihosoft.vrl.v3d.CSG.getMinX(), eu.mihosoft.vrl.v3d.CSG.getMinY(), eu.mihosoft.vrl.v3d.CSG.getMinZ(), eu.mihosoft.vrl.v3d.CSG.movex(), eu.mihosoft.vrl.v3d.CSG.movey(), eu.mihosoft.vrl.v3d.CSG.movez(), eu.mihosoft.vrl.v3d.Primitive.toCSG(), eu.mihosoft.vrl.v3d.CSG.toXMax(), eu.mihosoft.vrl.v3d.CSG.toYMax(), and eu.mihosoft.vrl.v3d.CSG.toZMax().
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().
◆ getCore()
| PhysicsCore com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getCore | ( | ) |
Definition at line 170 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.core.
Referenced by com.neuronrobotics.bowlerstudio.physics.HingeCSGPhysicsManager.update().
◆ getFallRigidBody()
| RigidBody com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getFallRigidBody | ( | ) |
Return a RigidBody for the physics engine
Implements com.neuronrobotics.bowlerstudio.physics.IPhysicsManager.
Definition at line 134 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.fallRigidBody.
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager(), com.neuronrobotics.bowlerstudio.physics.VehicleCSGPhysicsManager.update(), and com.neuronrobotics.bowlerstudio.physics.VehicleCSGPhysicsManager.VehicleCSGPhysicsManager().
◆ getRigidBodyLocation()
| Affine com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getRigidBodyLocation | ( | ) |
Return the current spatial location fo the rigid body
Implements com.neuronrobotics.bowlerstudio.physics.IPhysicsManager.
Definition at line 158 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.ballLocation.
Referenced by com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setBaseCSG().
◆ getUpdateManager()
| IPhysicsUpdate com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getUpdateManager | ( | ) |
Definition at line 162 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.updateManager.
Referenced by com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.update(), com.neuronrobotics.bowlerstudio.physics.VehicleCSGPhysicsManager.update(), and com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.update().
◆ getUpdateTransform()
| Transform com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getUpdateTransform | ( | ) |
The Bullet version of the location
Implements com.neuronrobotics.bowlerstudio.physics.IPhysicsManager.
Definition at line 154 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.updateTransform.
Referenced by com.neuronrobotics.bowlerstudio.physics.VehicleCSGPhysicsManager.update(), and com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.update().
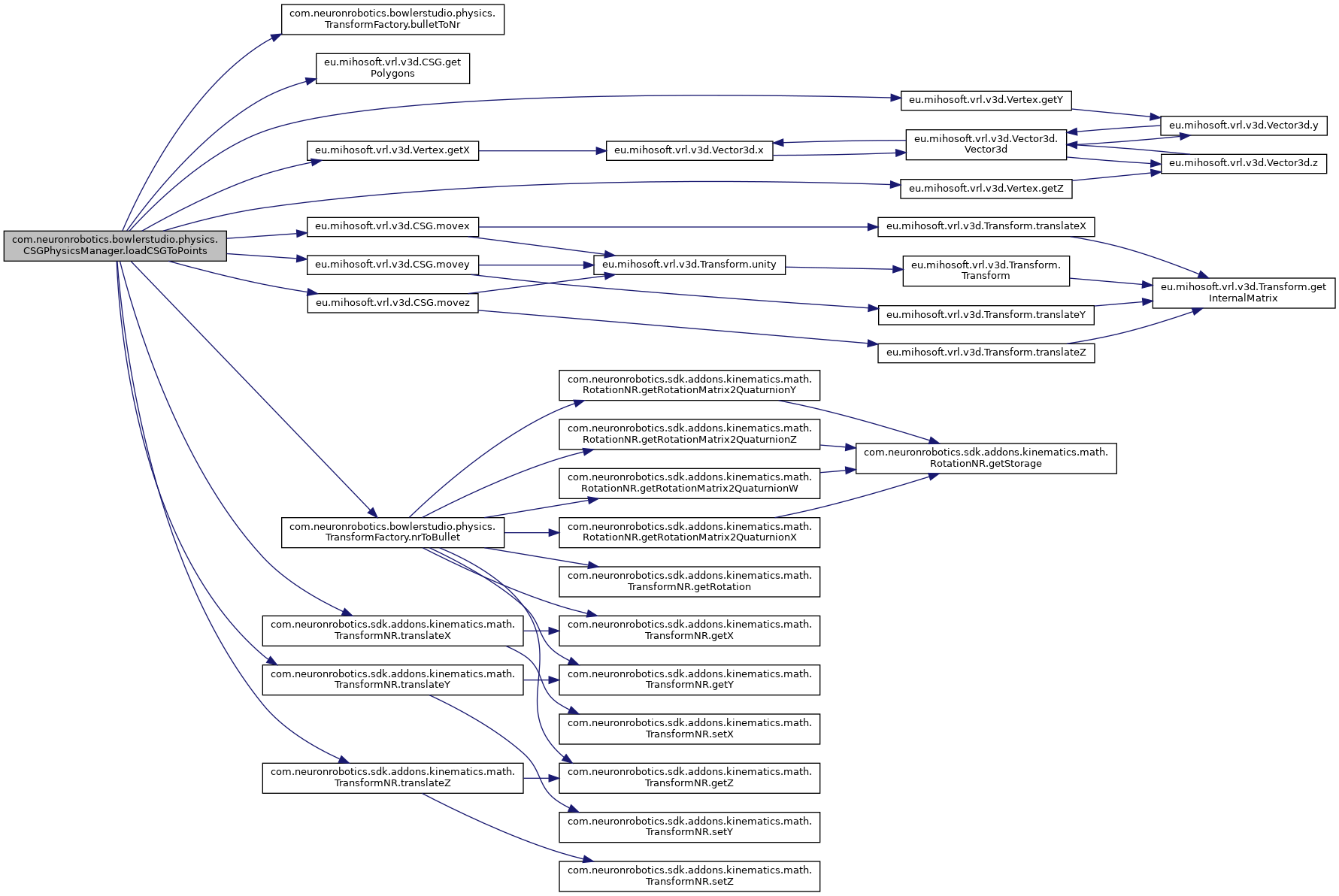
◆ loadCSGToPoints()
|
protected |
Definition at line 58 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.baseCSG, com.neuronrobotics.bowlerstudio.physics.TransformFactory.bulletToNr(), eu.mihosoft.vrl.v3d.CSG.getPolygons(), eu.mihosoft.vrl.v3d.Vertex.getX(), eu.mihosoft.vrl.v3d.Vertex.getY(), eu.mihosoft.vrl.v3d.Vertex.getZ(), eu.mihosoft.vrl.v3d.CSG.movex(), eu.mihosoft.vrl.v3d.CSG.movey(), eu.mihosoft.vrl.v3d.CSG.movez(), com.neuronrobotics.bowlerstudio.physics.TransformFactory.nrToBullet(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.translateX(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.translateY(), and com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.translateZ().
Referenced by com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.CSGPhysicsManager().
◆ setBaseCSG()
| void com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setBaseCSG | ( | List< CSG > | baseCSG | ) |
Definition at line 147 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.baseCSG, and com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getRigidBodyLocation().
Referenced by com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.CSGPhysicsManager(), and com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().

◆ setCore()
| void com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setCore | ( | PhysicsCore | core | ) |
Definition at line 174 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.core.
Referenced by com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setup().
◆ setFallRigidBody()
| void com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setFallRigidBody | ( | RigidBody | fallRigidBody | ) |
Definition at line 138 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.fallRigidBody.
Referenced by com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setup().
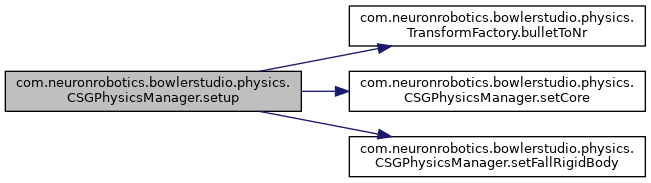
◆ setup()
| void com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setup | ( | CollisionShape | fallShape, |
| Transform | pose, | ||
| double | mass, | ||
| PhysicsCore | core | ||
| ) |
Definition at line 105 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.TransformFactory.bulletToNr(), com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setCore(), and com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setFallRigidBody().
Referenced by com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.CSGPhysicsManager().
◆ setUpdateManager()
| void com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setUpdateManager | ( | IPhysicsUpdate | updateManager | ) |
Definition at line 166 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.updateManager.
Referenced by com.neuronrobotics.bowlerstudio.physics.MobileBasePhysicsManager.MobileBasePhysicsManager().
◆ update()
| void com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.update | ( | float | timeStep | ) |
Run the update for this ridgid body. Run any controllers for links
Implements com.neuronrobotics.bowlerstudio.physics.IPhysicsManager.
Reimplemented in com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager, com.neuronrobotics.bowlerstudio.physics.VehicleCSGPhysicsManager, and com.neuronrobotics.bowlerstudio.physics.HingeCSGPhysicsManager.
Definition at line 122 of file CSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.fallRigidBody, com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getUpdateManager(), com.neuronrobotics.bowlerstudio.physics.IPhysicsUpdate.update(), and com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.updateTransform.

Member Data Documentation
◆ ballLocation
|
private |
Definition at line 33 of file CSGPhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getRigidBodyLocation().
◆ baseCSG
|
protected |
Definition at line 34 of file CSGPhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.CSGPhysicsManager(), com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getBaseCSG(), com.neuronrobotics.bowlerstudio.physics.HingeCSGPhysicsManager.HingeCSGPhysicsManager(), com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.loadCSGToPoints(), com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setBaseCSG(), com.neuronrobotics.bowlerstudio.physics.HingeCSGPhysicsManager.update(), com.neuronrobotics.bowlerstudio.physics.VehicleCSGPhysicsManager.VehicleCSGPhysicsManager(), and com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.WheelCSGPhysicsManager().
◆ core
|
private |
Definition at line 37 of file CSGPhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.CSGPhysicsManager(), com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getCore(), com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setCore(), and com.neuronrobotics.bowlerstudio.physics.VehicleCSGPhysicsManager.VehicleCSGPhysicsManager().
◆ fallRigidBody
|
private |
◆ updateManager
|
private |
Definition at line 36 of file CSGPhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getUpdateManager(), and com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.setUpdateManager().
◆ updateTransform
|
private |
Definition at line 35 of file CSGPhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getUpdateTransform(), and com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.update().
The documentation for this class was generated from the following file:
- src/main/java/com/neuronrobotics/bowlerstudio/physics/CSGPhysicsManager.java