Static Public Member Functions | |
| static float | getMotorStrength () |
| static void | setMuscleStrength (float ms) |
 Static Public Member Functions inherited from com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager Static Public Member Functions inherited from com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager | |
| static CSG | getBoundingBox (CSG incoming) |
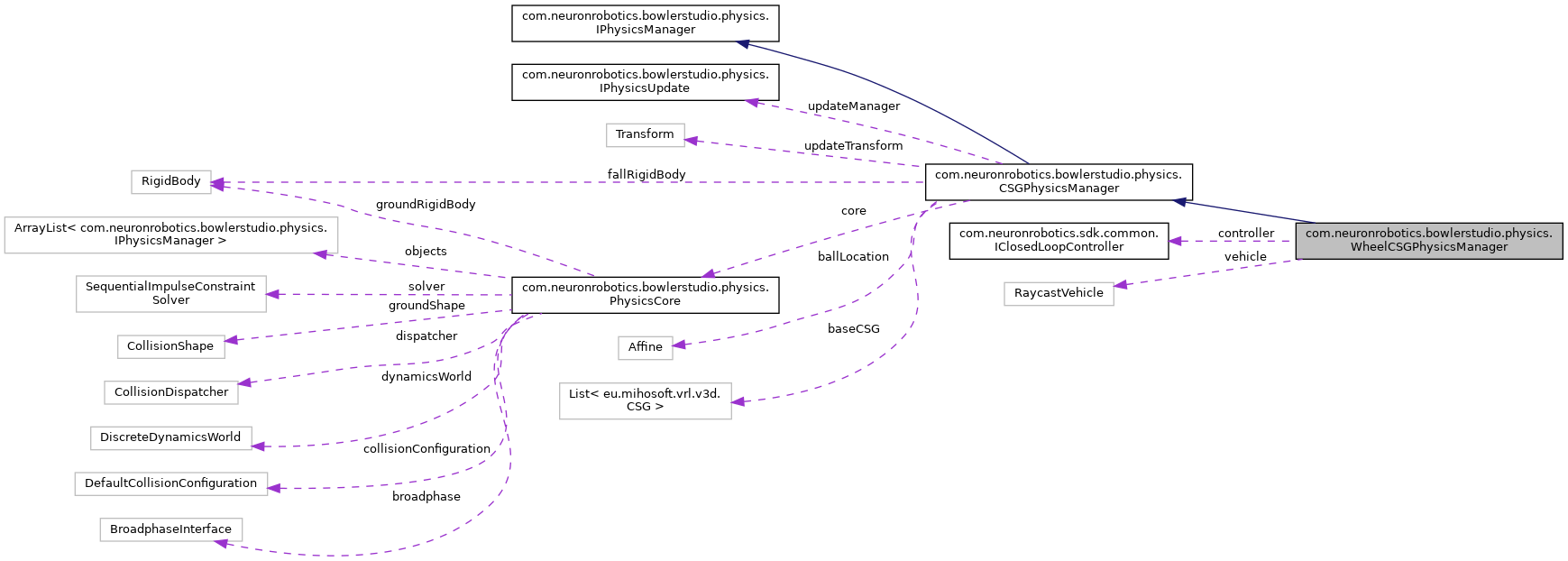
Private Attributes | |
| IClosedLoopController | controller = null |
| double | target = 0 |
| double | velocity |
| RaycastVehicle | vehicle |
| final int | wheelIndex |
Static Private Attributes | |
| static float | muscleStrength = (float) 1000 |
Additional Inherited Members | |
| Protected Member Functions inherited from com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager | |
| CSG | loadCSGToPoints (CSG baseCSG, boolean adjustCenter, Transform pose, ObjectArrayList< Vector3f > arg0) |
| Protected Attributes inherited from com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager | |
| List< CSG > | baseCSG = null |
Detailed Description
Definition at line 15 of file WheelCSGPhysicsManager.java.
Constructor & Destructor Documentation
◆ WheelCSGPhysicsManager()
| com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.WheelCSGPhysicsManager | ( | ArrayList< CSG > | baseCSG, |
| Transform | pose, | ||
| double | mass, | ||
| PhysicsCore | c, | ||
| RaycastVehicle | v, | ||
| int | wheelIndex | ||
| ) |
Definition at line 25 of file WheelCSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.baseCSG, and com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.wheelIndex.
Member Function Documentation
◆ getController()
| IClosedLoopController com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getController | ( | ) |
Definition at line 74 of file WheelCSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.controller.
Referenced by com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.update().
◆ getMotorStrength()
|
static |
Definition at line 62 of file WheelCSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.muscleStrength.
◆ getTarget()
| double com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getTarget | ( | ) |
Definition at line 54 of file WheelCSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.target.
Referenced by com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.update().
◆ getWheelIndex()
| int com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getWheelIndex | ( | ) |
Definition at line 86 of file WheelCSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.wheelIndex.
Referenced by com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getWheelInfo(), and com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.update().
◆ getWheelInfo()
| WheelInfo com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getWheelInfo | ( | ) |
Definition at line 82 of file WheelCSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getWheelIndex(), and com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.vehicle.
Referenced by com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.update().

◆ setController()
| void com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.setController | ( | IClosedLoopController | controller | ) |
Definition at line 78 of file WheelCSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.controller.
◆ setMuscleStrength() [1/2]
| void com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.setMuscleStrength | ( | double | muscleStrength | ) |
Definition at line 70 of file WheelCSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.muscleStrength, and com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.setMuscleStrength().

◆ setMuscleStrength() [2/2]
|
static |
Definition at line 66 of file WheelCSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.muscleStrength.
Referenced by com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.setMuscleStrength().
◆ setTarget()
| void com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.setTarget | ( | double | target | ) |
Definition at line 58 of file WheelCSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.target.
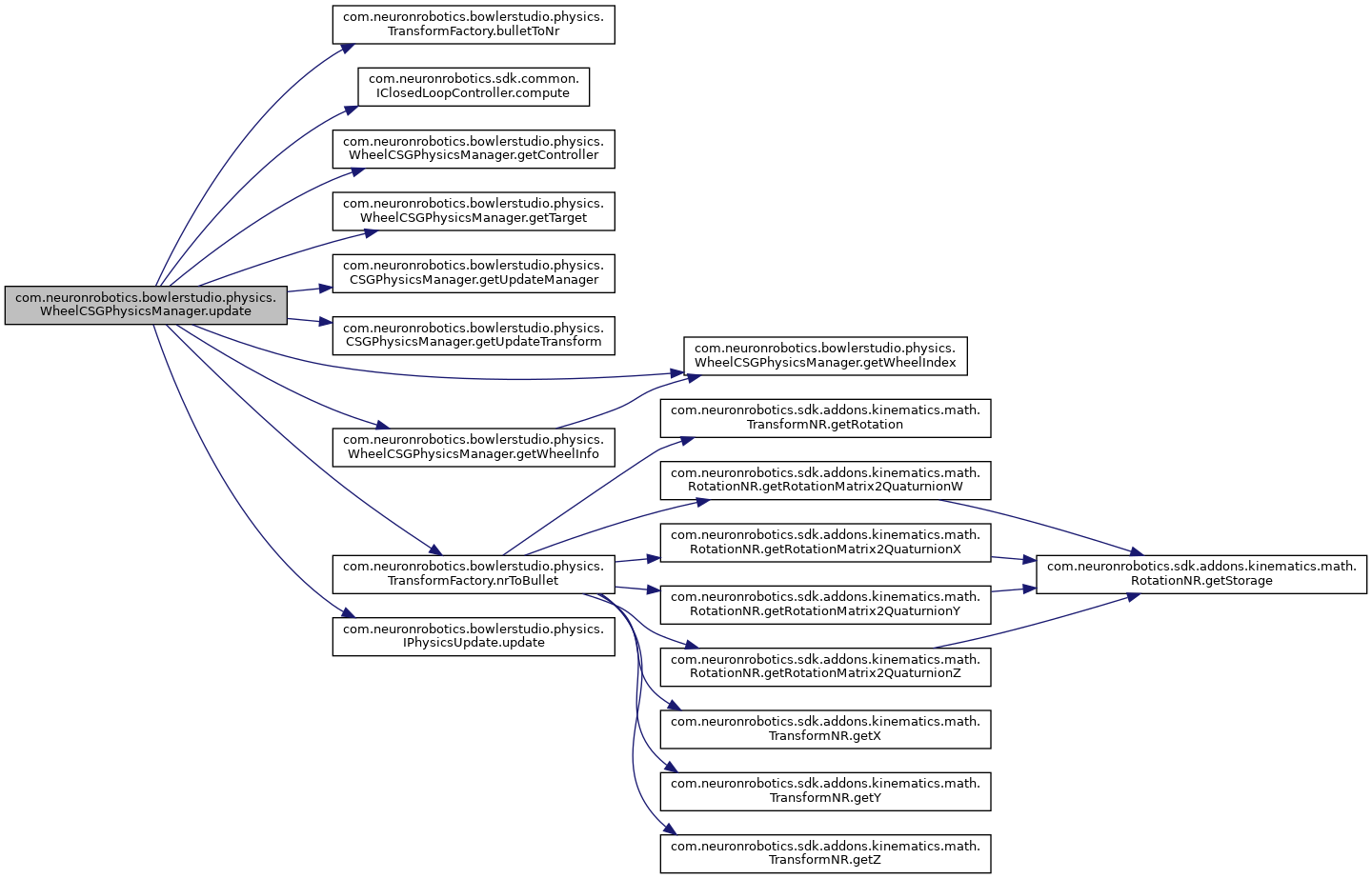
◆ update()
| void com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.update | ( | float | timeStep | ) |
Run the update for this ridgid body. Run any controllers for links
Reimplemented from com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.
Definition at line 33 of file WheelCSGPhysicsManager.java.
References com.neuronrobotics.bowlerstudio.physics.TransformFactory.bulletToNr(), com.neuronrobotics.sdk.common.IClosedLoopController.compute(), com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getController(), com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getTarget(), com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getUpdateManager(), com.neuronrobotics.bowlerstudio.physics.CSGPhysicsManager.getUpdateTransform(), com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getWheelIndex(), com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getWheelInfo(), com.neuronrobotics.bowlerstudio.physics.TransformFactory.nrToBullet(), com.neuronrobotics.bowlerstudio.physics.IPhysicsUpdate.update(), com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.vehicle, and com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.velocity.
Member Data Documentation
◆ controller
|
private |
Definition at line 17 of file WheelCSGPhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getController(), and com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.setController().
◆ muscleStrength
|
staticprivate |
Definition at line 19 of file WheelCSGPhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getMotorStrength(), and com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.setMuscleStrength().
◆ target
|
private |
Definition at line 18 of file WheelCSGPhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getTarget(), and com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.setTarget().
◆ vehicle
|
private |
Definition at line 22 of file WheelCSGPhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getWheelInfo(), and com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.update().
◆ velocity
|
private |
Definition at line 21 of file WheelCSGPhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.update().
◆ wheelIndex
|
private |
Definition at line 23 of file WheelCSGPhysicsManager.java.
Referenced by com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.getWheelIndex(), and com.neuronrobotics.bowlerstudio.physics.WheelCSGPhysicsManager.WheelCSGPhysicsManager().
The documentation for this class was generated from the following file:
- src/main/java/com/neuronrobotics/bowlerstudio/physics/WheelCSGPhysicsManager.java