
Public Member Functions | |
| ConfigurePDVelocityCommand (int group) | |
| ConfigurePDVelocityCommand (PDVelocityConfiguration config) | |
 Public Member Functions inherited from com.neuronrobotics.sdk.common.BowlerAbstractCommand Public Member Functions inherited from com.neuronrobotics.sdk.common.BowlerAbstractCommand | |
| byte[] | getCallingData () |
| void | setOpCode (String opCode) |
| String | getOpCode () |
| void | setMethod (BowlerMethod method) |
| BowlerMethod | getMethod () |
| byte | getLength () |
| BowlerDatagram | validate (BowlerDatagram data) throws InvalidResponseException |
| byte[] | getBytes () |
| String | toString () |
| void | setData (ByteList data) |
| ByteList | getCallingDataStorage () |
| void | setNamespaceIndex (int namespaceIndex) |
| int | getNamespaceIndex () |
Additional Inherited Members | |
| Static Public Member Functions inherited from com.neuronrobotics.sdk.common.BowlerAbstractCommand | |
| static BowlerAbstractCommand | parse (BowlerDatagram data) |
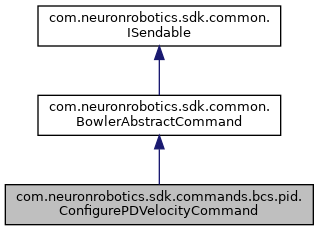
Detailed Description
The Class ConfigurePDVelocityCommand.
Definition at line 11 of file ConfigurePDVelocityCommand.java.
Constructor & Destructor Documentation
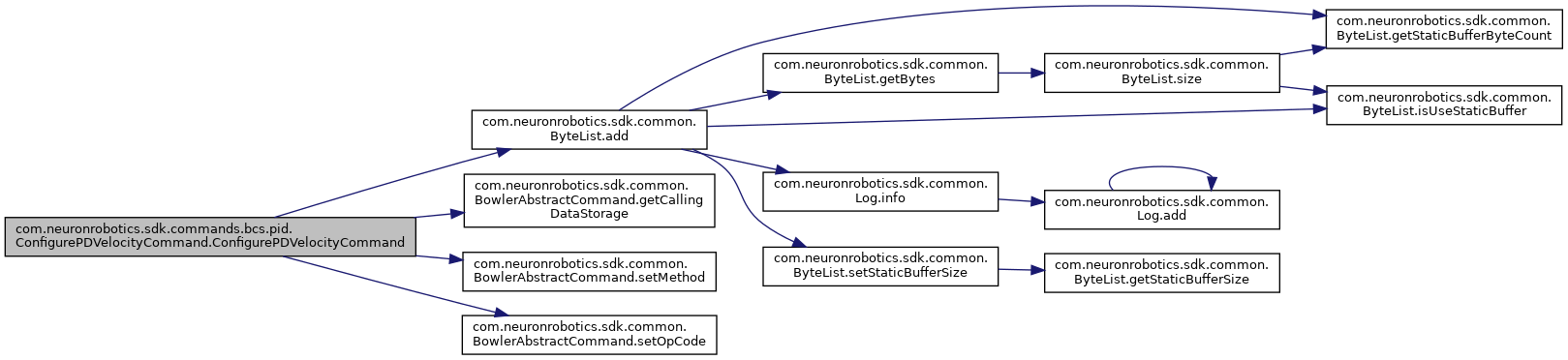
◆ ConfigurePDVelocityCommand() [1/2]
| com.neuronrobotics.sdk.commands.bcs.pid.ConfigurePDVelocityCommand.ConfigurePDVelocityCommand | ( | int | group | ) |
Instantiates a new configure pd velocity command.
- Parameters
-
group the group
Definition at line 18 of file ConfigurePDVelocityCommand.java.
References com.neuronrobotics.sdk.common.ByteList.add(), com.neuronrobotics.sdk.common.BowlerMethod.GET, com.neuronrobotics.sdk.common.BowlerAbstractCommand.getCallingDataStorage(), com.neuronrobotics.sdk.common.BowlerAbstractCommand.setMethod(), and com.neuronrobotics.sdk.common.BowlerAbstractCommand.setOpCode().
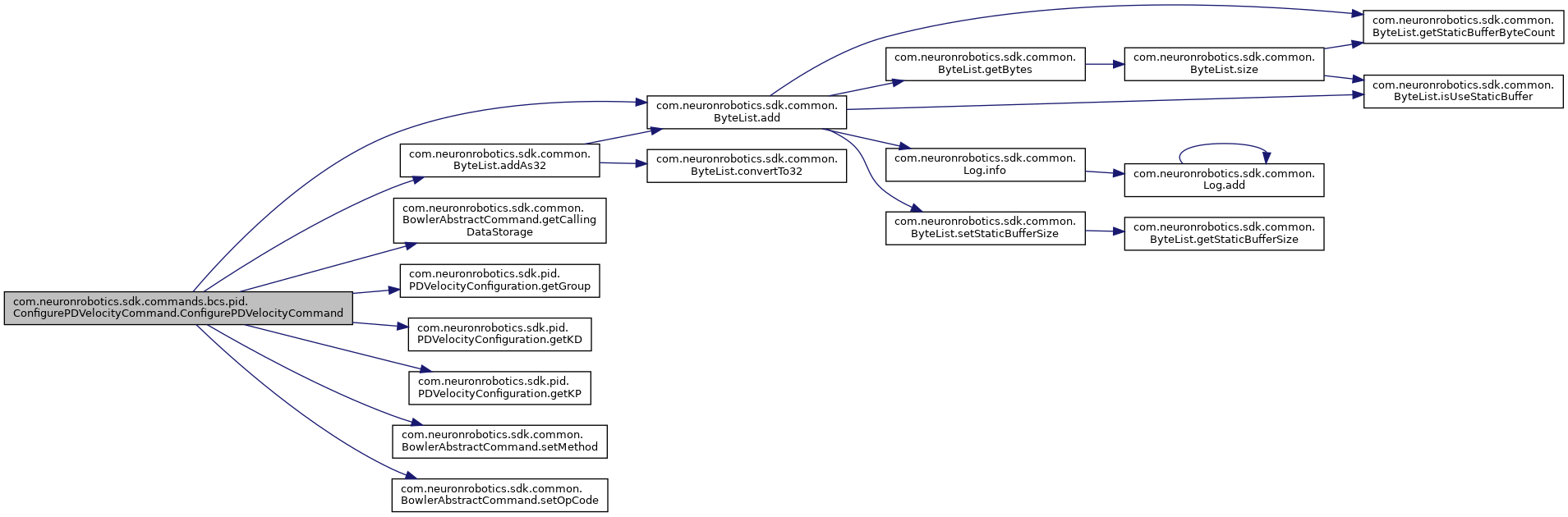
◆ ConfigurePDVelocityCommand() [2/2]
| com.neuronrobotics.sdk.commands.bcs.pid.ConfigurePDVelocityCommand.ConfigurePDVelocityCommand | ( | PDVelocityConfiguration | config | ) |
Instantiates a new configure pd velocity command.
- Parameters
-
config the config
Definition at line 29 of file ConfigurePDVelocityCommand.java.
References com.neuronrobotics.sdk.common.ByteList.add(), com.neuronrobotics.sdk.common.ByteList.addAs32(), com.neuronrobotics.sdk.common.BowlerMethod.CRITICAL, com.neuronrobotics.sdk.common.BowlerAbstractCommand.getCallingDataStorage(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getGroup(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getKD(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getKP(), com.neuronrobotics.sdk.common.BowlerAbstractCommand.setMethod(), and com.neuronrobotics.sdk.common.BowlerAbstractCommand.setOpCode().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/commands/bcs/pid/ConfigurePDVelocityCommand.java