Public Member Functions | |
| PDVelocityConfiguration () | |
| PDVelocityConfiguration (int group, boolean enabled, boolean inverted, boolean async, double KP, double KI, double KD, double latch, boolean useLatch, boolean stopOnLatch) | |
| PDVelocityConfiguration (BowlerDatagram conf) | |
| PDVelocityConfiguration (Object[] args) | |
| String | toString () |
| void | setGroup (int group) |
| int | getGroup () |
| void | setKP (double kP) |
| double | getKP () |
| void | setKD (double kD) |
| double | getKD () |
| Object[] | getArgs () |
Private Attributes | |
| int | group =0 |
| double | KP =1 |
| double | KD =0 |
Detailed Description
The Class PDVelocityConfiguration.
Definition at line 10 of file PDVelocityConfiguration.java.
Constructor & Destructor Documentation
◆ PDVelocityConfiguration() [1/4]
| com.neuronrobotics.sdk.pid.PDVelocityConfiguration.PDVelocityConfiguration | ( | ) |
Instantiates a new PD velocity configuration.
Definition at line 24 of file PDVelocityConfiguration.java.
◆ PDVelocityConfiguration() [2/4]
| com.neuronrobotics.sdk.pid.PDVelocityConfiguration.PDVelocityConfiguration | ( | int | group, |
| boolean | enabled, | ||
| boolean | inverted, | ||
| boolean | async, | ||
| double | KP, | ||
| double | KI, | ||
| double | KD, | ||
| double | latch, | ||
| boolean | useLatch, | ||
| boolean | stopOnLatch | ||
| ) |
Instantiates a new PD velocity configuration.
- Parameters
-
group This is the PID group this configuration object represents enabled True if the controller is running, false otherwise inverted This inverts the output value. Set true if the controller diverges async sets the flag to send this channels async values upstream KP Proportional constant KI Integral constant KD Derivative constant latch The value to latch into the PID controller if the home switch is hit (encoder only, not used in analog PID) useLatch Use the value to latch into the PID controller if the home switch is hit (encoder only, not used in analog PID) stopOnLatch Set the setpoint of the controller to current if home switch is hit (encoder only, not used in analog PID)
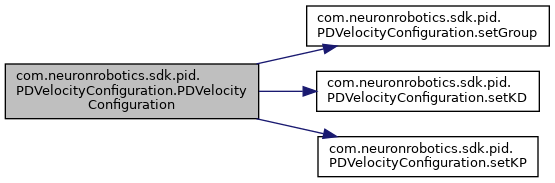
Definition at line 42 of file PDVelocityConfiguration.java.
References com.neuronrobotics.sdk.pid.PDVelocityConfiguration.group, com.neuronrobotics.sdk.pid.PDVelocityConfiguration.KD, com.neuronrobotics.sdk.pid.PDVelocityConfiguration.KP, com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setGroup(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setKD(), and com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setKP().
◆ PDVelocityConfiguration() [3/4]
| com.neuronrobotics.sdk.pid.PDVelocityConfiguration.PDVelocityConfiguration | ( | BowlerDatagram | conf | ) |
Used to parse a PID configuration out of a PID packet.
- Parameters
-
conf the conf
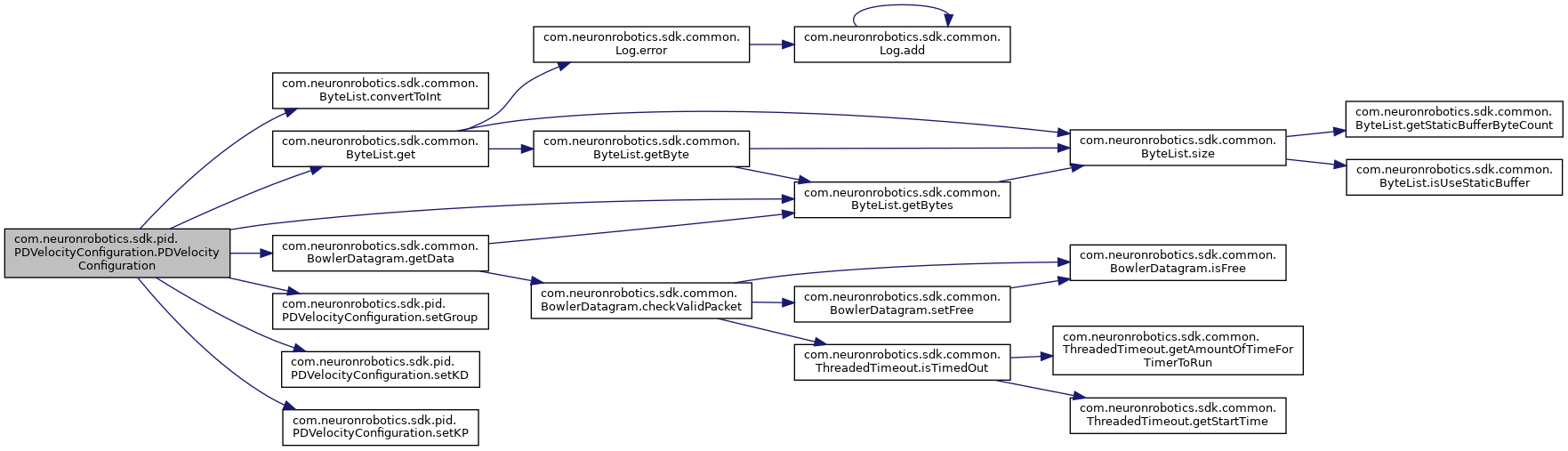
Definition at line 54 of file PDVelocityConfiguration.java.
References com.neuronrobotics.sdk.common.ByteList.convertToInt(), com.neuronrobotics.sdk.common.ByteList.get(), com.neuronrobotics.sdk.common.ByteList.getBytes(), com.neuronrobotics.sdk.common.BowlerDatagram.getData(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setGroup(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setKD(), and com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setKP().
◆ PDVelocityConfiguration() [4/4]
| com.neuronrobotics.sdk.pid.PDVelocityConfiguration.PDVelocityConfiguration | ( | Object[] | args | ) |
Instantiates a new PD velocity configuration.
- Parameters
-
args the args
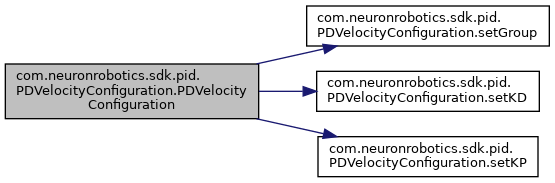
Definition at line 65 of file PDVelocityConfiguration.java.
References com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setGroup(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setKD(), and com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setKP().
Member Function Documentation
◆ getArgs()
| Object [] com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getArgs | ( | ) |
Gets the args.
- Returns
- the args
Definition at line 140 of file PDVelocityConfiguration.java.
References com.neuronrobotics.sdk.pid.PDVelocityConfiguration.group, com.neuronrobotics.sdk.pid.PDVelocityConfiguration.KD, and com.neuronrobotics.sdk.pid.PDVelocityConfiguration.KP.
Referenced by com.neuronrobotics.sdk.namespace.bcs.pid.PidNamespaceImp.ConfigurePDVelovityController(), and com.neuronrobotics.sdk.namespace.bcs.pid.PidDeviceServerNamespace.PidDeviceServerNamespace().
◆ getGroup()
| int com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getGroup | ( | ) |
Gets the group.
- Returns
- the group
Definition at line 95 of file PDVelocityConfiguration.java.
References com.neuronrobotics.sdk.pid.PDVelocityConfiguration.group.
Referenced by com.neuronrobotics.sdk.commands.bcs.pid.ConfigurePDVelocityCommand.ConfigurePDVelocityCommand(), com.neuronrobotics.sdk.pid.VirtualGenericPIDDevice.ConfigurePDVelovityController(), and com.neuronrobotics.sdk.pid.PDVelocityConfiguration.toString().
◆ getKD()
| double com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getKD | ( | ) |
Gets the kd.
- Returns
- the kd
Definition at line 131 of file PDVelocityConfiguration.java.
References com.neuronrobotics.sdk.pid.PDVelocityConfiguration.KD.
Referenced by com.neuronrobotics.sdk.commands.bcs.pid.ConfigurePDVelocityCommand.ConfigurePDVelocityCommand(), and com.neuronrobotics.sdk.pid.PDVelocityConfiguration.toString().
◆ getKP()
| double com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getKP | ( | ) |
Gets the kp.
- Returns
- the kp
Definition at line 113 of file PDVelocityConfiguration.java.
References com.neuronrobotics.sdk.pid.PDVelocityConfiguration.KP.
Referenced by com.neuronrobotics.sdk.commands.bcs.pid.ConfigurePDVelocityCommand.ConfigurePDVelocityCommand(), and com.neuronrobotics.sdk.pid.PDVelocityConfiguration.toString().
◆ setGroup()
| void com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setGroup | ( | int | group | ) |
Sets the group.
- Parameters
-
group the new group
Definition at line 86 of file PDVelocityConfiguration.java.
References com.neuronrobotics.sdk.pid.PDVelocityConfiguration.group.
Referenced by com.neuronrobotics.sdk.pid.PDVelocityConfiguration.PDVelocityConfiguration().
◆ setKD()
| void com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setKD | ( | double | kD | ) |
Sets the kd.
- Parameters
-
kD the new kd
Definition at line 122 of file PDVelocityConfiguration.java.
References com.neuronrobotics.sdk.pid.PDVelocityConfiguration.KD.
Referenced by com.neuronrobotics.sdk.pid.PDVelocityConfiguration.PDVelocityConfiguration().
◆ setKP()
| void com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setKP | ( | double | kP | ) |
Sets the kp.
- Parameters
-
kP the new kp
Definition at line 104 of file PDVelocityConfiguration.java.
References com.neuronrobotics.sdk.pid.PDVelocityConfiguration.KP.
Referenced by com.neuronrobotics.sdk.pid.PDVelocityConfiguration.PDVelocityConfiguration().
◆ toString()
| String com.neuronrobotics.sdk.pid.PDVelocityConfiguration.toString | ( | ) |
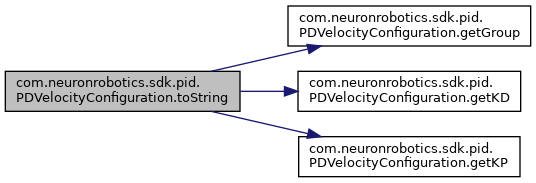
Definition at line 75 of file PDVelocityConfiguration.java.
References com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getGroup(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getKD(), and com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getKP().
Member Data Documentation
◆ group
|
private |
The group.
Definition at line 13 of file PDVelocityConfiguration.java.
Referenced by com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getArgs(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getGroup(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.PDVelocityConfiguration(), and com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setGroup().
◆ KD
|
private |
The kd.
Definition at line 19 of file PDVelocityConfiguration.java.
Referenced by com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getArgs(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getKD(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.PDVelocityConfiguration(), and com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setKD().
◆ KP
|
private |
The kp.
Definition at line 16 of file PDVelocityConfiguration.java.
Referenced by com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getArgs(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.getKP(), com.neuronrobotics.sdk.pid.PDVelocityConfiguration.PDVelocityConfiguration(), and com.neuronrobotics.sdk.pid.PDVelocityConfiguration.setKP().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/pid/PDVelocityConfiguration.java