Additional Inherited Members | |
 Protected Member Functions inherited from com.neuronrobotics.sdk.addons.kinematics.AbstractLink Protected Member Functions inherited from com.neuronrobotics.sdk.addons.kinematics.AbstractLink | |
| void | setPosition (double val) |
| void | setTargetValue (double val) |
Detailed Description
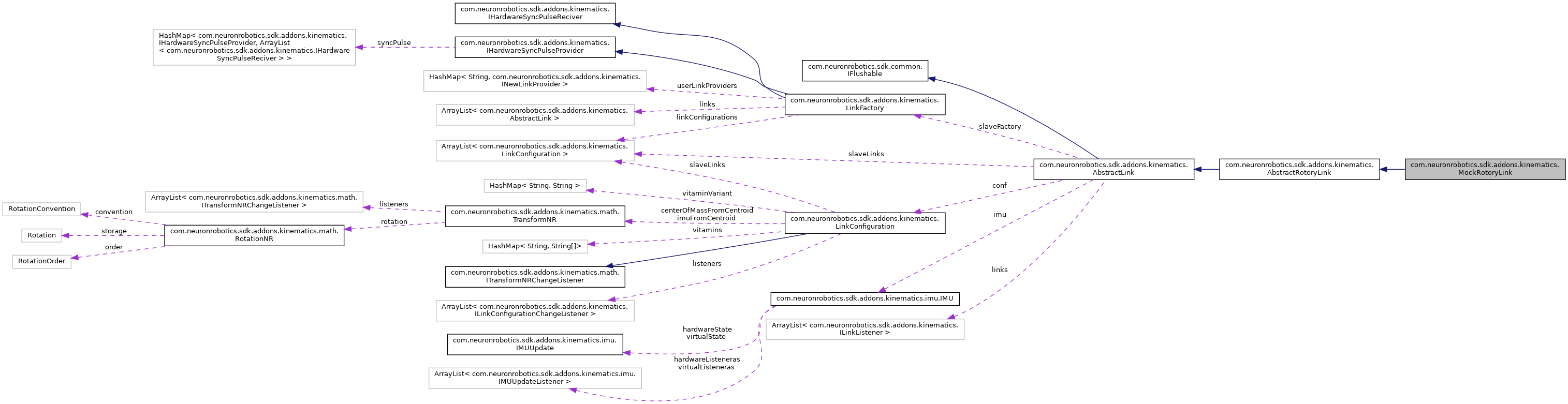
The Class MockRotoryLink.
Definition at line 7 of file MockRotoryLink.java.
Constructor & Destructor Documentation
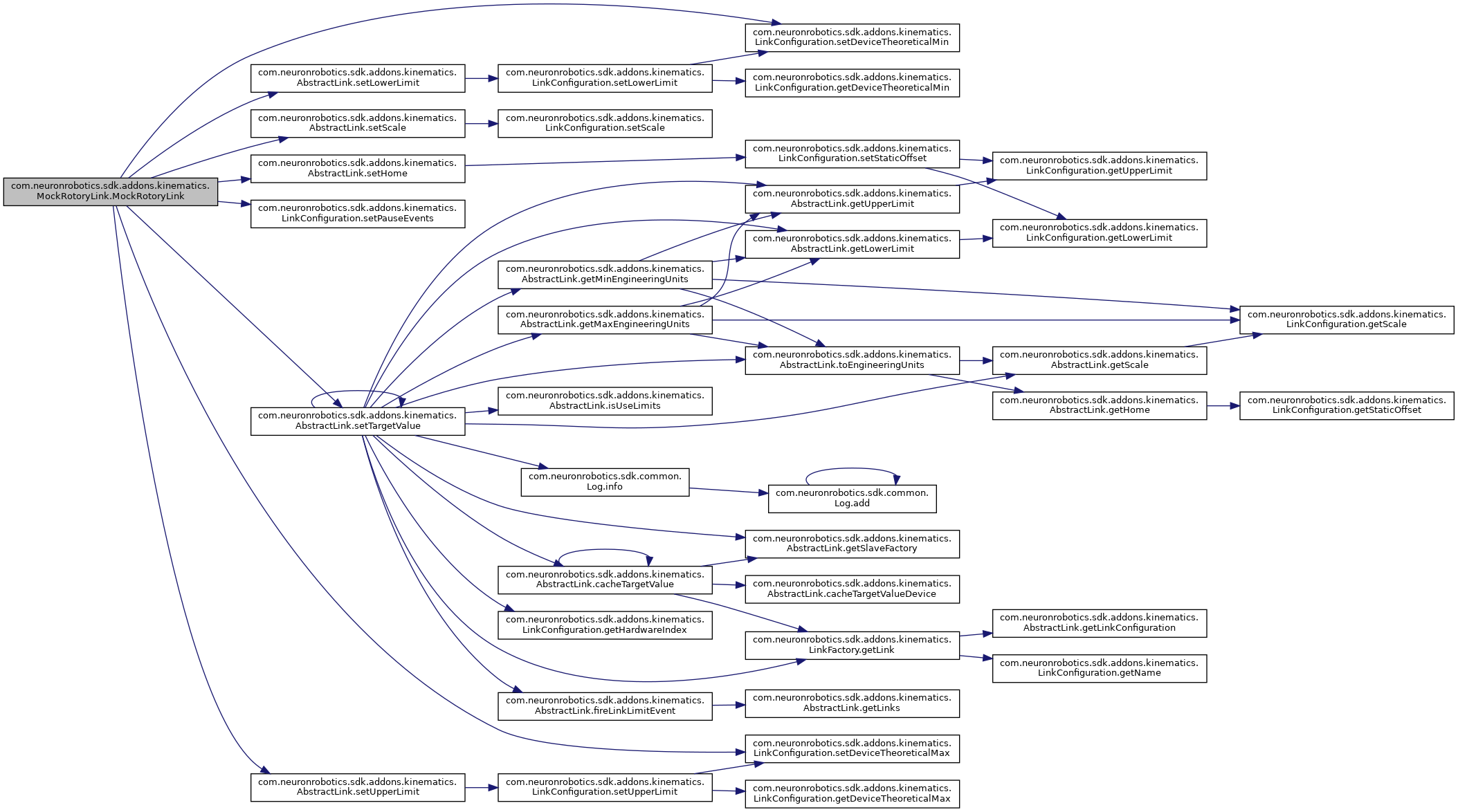
◆ MockRotoryLink()
| com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.MockRotoryLink | ( | LinkConfiguration | conf | ) |
Instantiates a new mock rotory link.
- Parameters
-
conf the conf
Definition at line 17 of file MockRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf, com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMax(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setDeviceTheoreticalMin(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setHome(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setLowerLimit(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setPauseEvents(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setScale(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue(), and com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setUpperLimit().
Member Function Documentation
◆ cacheTargetValueDevice()
| void com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.cacheTargetValueDevice | ( | ) |
This method is called in order to take the target value and pass it to the implementation's target value This method should not alter the position of the implementations link If the implementation target does not handle chached values, this should be chached in code.
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractLink.
Definition at line 34 of file MockRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getTargetValue().

◆ flushAllDevice()
| void com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.flushAllDevice | ( | double | time | ) |
This method will force one link to update its position in the given time (seconds) This will also flush the host controller.
- Parameters
-
time (seconds) for the position update to take
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractLink.
Definition at line 61 of file MockRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getTargetValue().

◆ flushDevice()
| void com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.flushDevice | ( | double | time | ) |
This method will force one link to update its position in the given time (seconds).
- Parameters
-
time (seconds) for the position update to take
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractLink.
Definition at line 43 of file MockRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getTargetValue().

◆ getCurrentPosition()
| double com.neuronrobotics.sdk.addons.kinematics.MockRotoryLink.getCurrentPosition | ( | ) |
This method should return the current position of the link This method is expected to perform a communication with the device .
- Returns
- the current position of the link
Reimplemented from com.neuronrobotics.sdk.addons.kinematics.AbstractLink.
Definition at line 52 of file MockRotoryLink.java.
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/MockRotoryLink.java