
Additional Inherited Members | |
 Protected Member Functions inherited from com.neuronrobotics.sdk.addons.kinematics.AbstractLink Protected Member Functions inherited from com.neuronrobotics.sdk.addons.kinematics.AbstractLink | |
| void | setPosition (double val) |
| void | setTargetValue (double val) |
Detailed Description
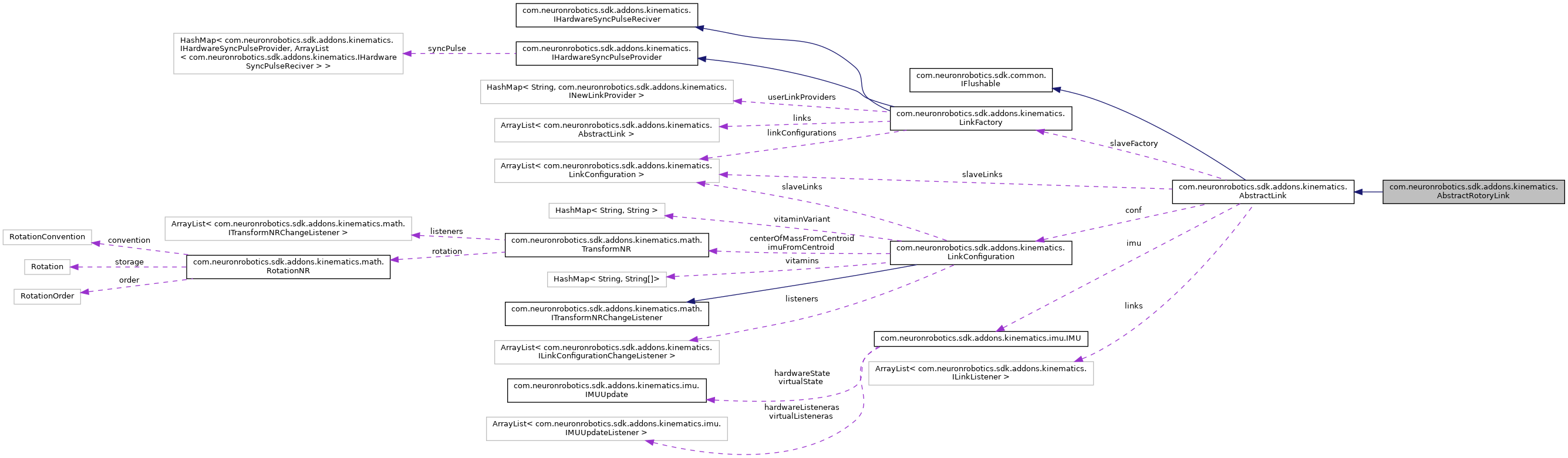
The Class AbstractRotoryLink.
Definition at line 7 of file AbstractRotoryLink.java.
Constructor & Destructor Documentation
◆ AbstractRotoryLink()
| com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.AbstractRotoryLink | ( | LinkConfiguration | conf | ) |
Instantiates a new abstract rotory link.
- Parameters
-
conf the conf
Definition at line 14 of file AbstractRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.conf.
Member Function Documentation
◆ getCurrentAngle()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.getCurrentAngle | ( | ) |
Gets the current angle.
- Returns
- the current angle
Definition at line 51 of file AbstractRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getCurrentEngineeringUnits().

◆ getMaxAngle()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.getMaxAngle | ( | ) |
Gets the max angle.
- Returns
- the max angle
Definition at line 69 of file AbstractRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMaxEngineeringUnits().

◆ getMinAngle()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.getMinAngle | ( | ) |
Gets the min angle.
- Returns
- the min angle
Definition at line 78 of file AbstractRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getMinEngineeringUnits().

◆ getTargetAngle()
| double com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.getTargetAngle | ( | ) |
Gets the target angle.
- Returns
- the target angle
Definition at line 60 of file AbstractRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.getTargetEngineeringUnits().

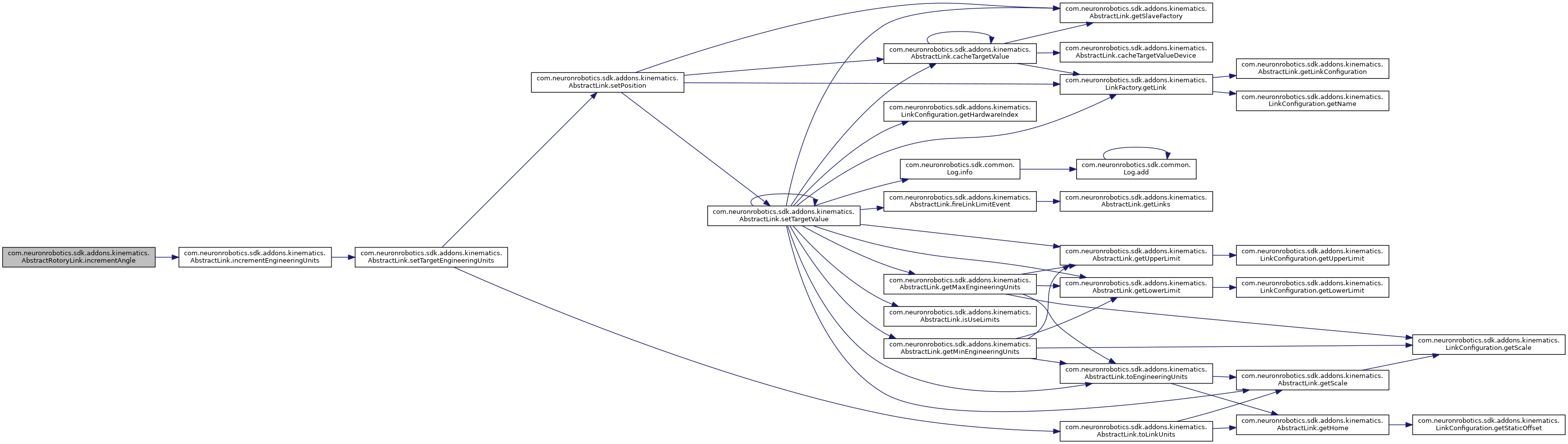
◆ incrementAngle()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.incrementAngle | ( | double | inc | ) |
Increment angle.
- Parameters
-
inc the inc
Definition at line 24 of file AbstractRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.incrementEngineeringUnits().
◆ isMaxAngle()
| boolean com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.isMaxAngle | ( | ) |
Checks if is max angle.
- Returns
- true, if is max angle
Definition at line 87 of file AbstractRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.isMaxEngineeringUnits().

◆ isMinAngle()
| boolean com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.isMinAngle | ( | ) |
Checks if is min angle.
- Returns
- true, if is min angle
Definition at line 96 of file AbstractRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.isMinEngineeringUnits().

◆ setCurrentAsAngle()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.setCurrentAsAngle | ( | double | angle | ) |
Sets the current as angle.
- Parameters
-
angle the new current as angle
Definition at line 42 of file AbstractRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setCurrentEngineeringUnits().

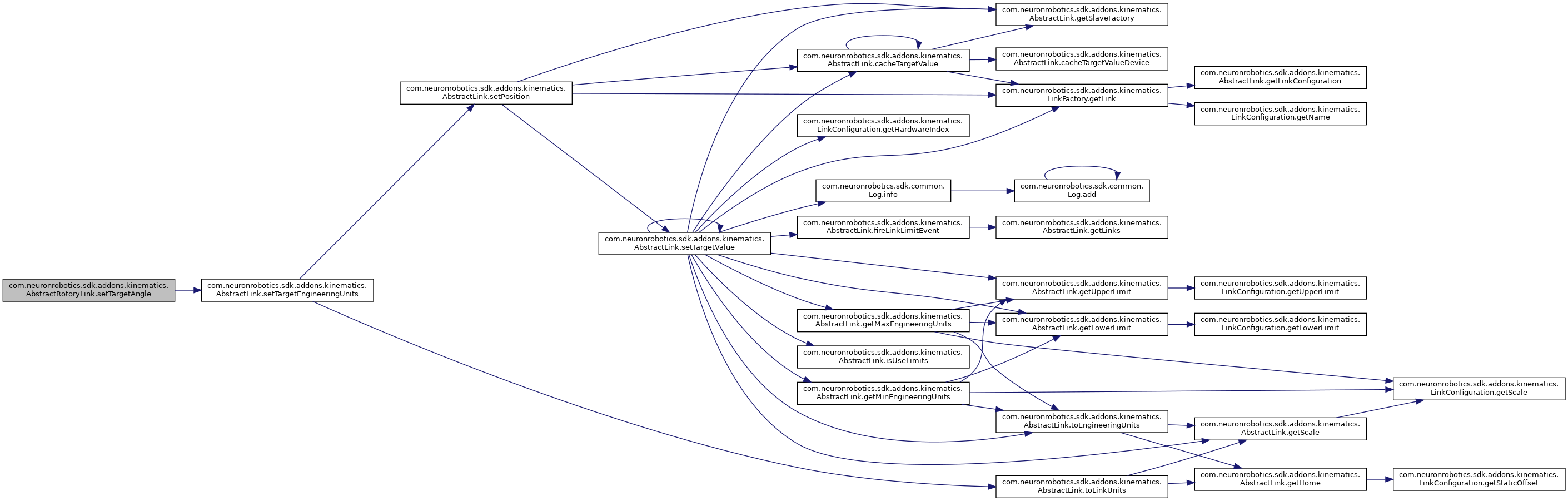
◆ setTargetAngle()
| void com.neuronrobotics.sdk.addons.kinematics.AbstractRotoryLink.setTargetAngle | ( | double | pos | ) |
Sets the target angle.
- Parameters
-
pos the new target angle
Definition at line 33 of file AbstractRotoryLink.java.
References com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetEngineeringUnits().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/AbstractRotoryLink.java