

 Public Member Functions inherited from
Public Member Functions inherited from Static Public Attributes | |
| static final int | NO_CROSSLINK = 0xff |
Private Member Functions | |
| void | updateValues () |
Private Attributes | |
| int[] | crossLinks =null |
Static Private Attributes | |
| static final DyIOChannelMode | myMode = DyIOChannelMode.PPM_IN |
Detailed Description
This class is a wrapper for the DyIO PPM signal reader. This manages taking Channel 23 and using it to read values from the VEX rc controller (others might be supported as well)
Definition at line 25 of file PPMReaderChannel.java.
Constructor & Destructor Documentation
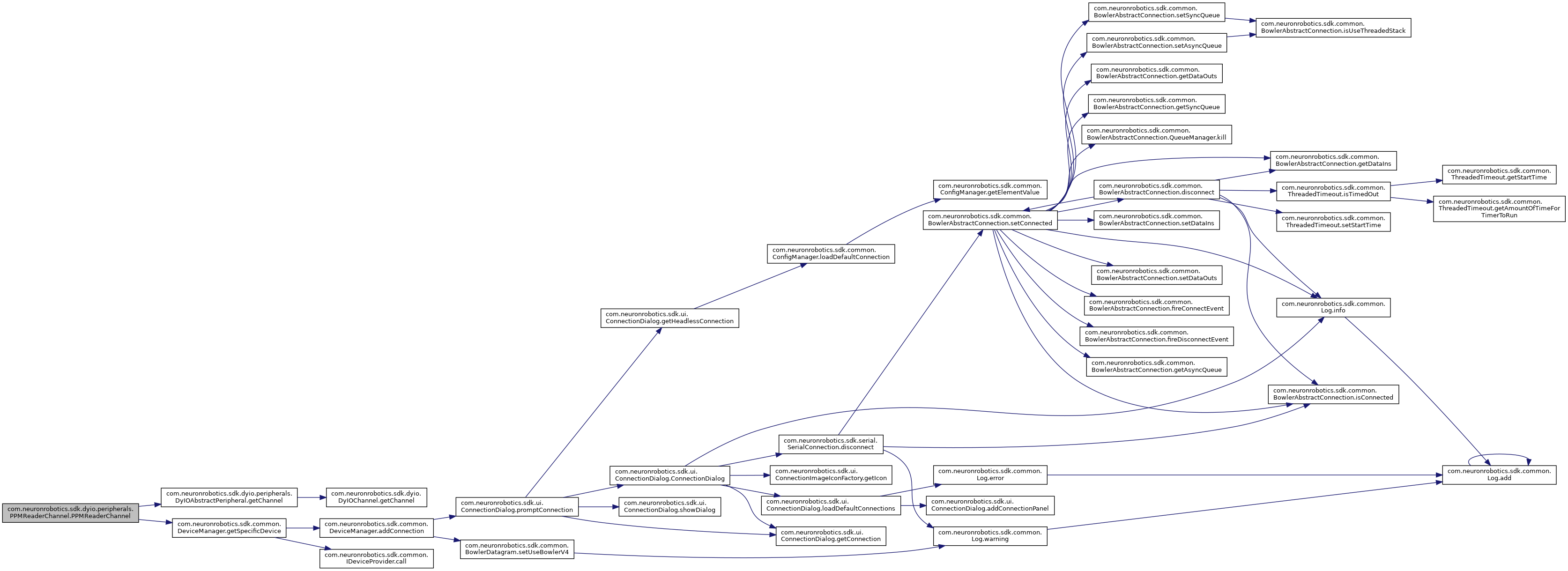
◆ PPMReaderChannel() [1/2]
| com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.PPMReaderChannel | ( | ) |
Void constructor assumes you are suing the DyIORegestry and channel 23.
Definition at line 42 of file PPMReaderChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.getChannel(), and com.neuronrobotics.sdk.common.DeviceManager.getSpecificDevice().
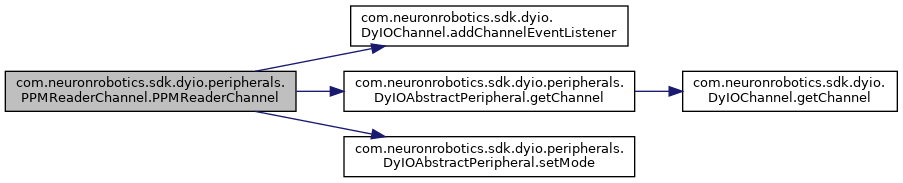
◆ PPMReaderChannel() [2/2]
| com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.PPMReaderChannel | ( | DyIOChannel | channel | ) |
Takes a DyIO channel which must be channel 23.
- Parameters
-
channel the channel
Definition at line 51 of file PPMReaderChannel.java.
References com.neuronrobotics.sdk.dyio.DyIOChannel.addChannelEventListener(), com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.channel, com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.getChannel(), com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.myMode, and com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.setMode().
Member Function Documentation
◆ addPPMReaderListener()
| void com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.addPPMReaderListener | ( | IPPMReaderListener | l | ) |
Add a PPM reader listener.
- Parameters
-
l the IPPMReaderListener to add
Definition at line 178 of file PPMReaderChannel.java.
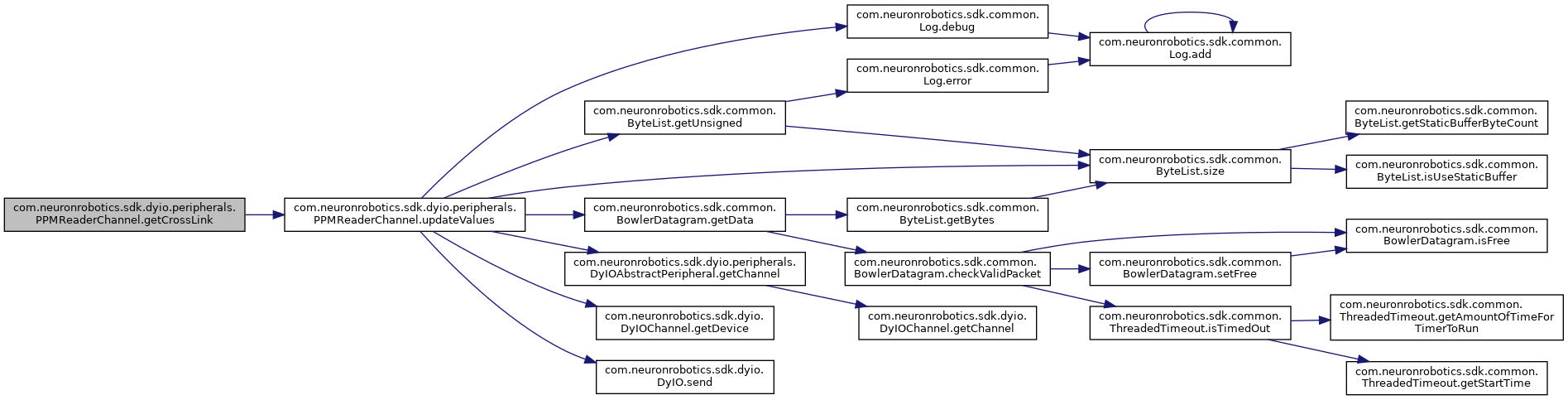
◆ getCrossLink()
| int [] com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.getCrossLink | ( | ) |
Request the cross link map.
- Returns
- an array of integers corosponding to the cross linking for the DyIO outputs
Definition at line 106 of file PPMReaderChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.crossLinks, and com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.updateValues().
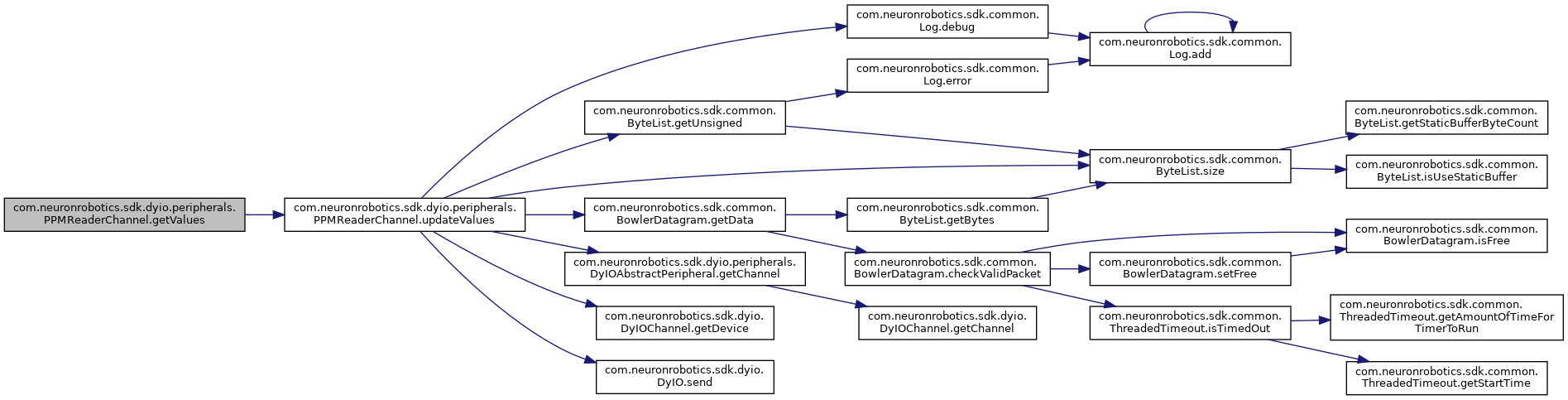
◆ getValues()
| int [] com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.getValues | ( | ) |
Get the current state of the PPM reader.
- Returns
- the values of the current state of the PPM channels
Definition at line 123 of file PPMReaderChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.updateValues().
Referenced by com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.onChannelEvent().
◆ hasAsync()
| boolean com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.hasAsync | ( | ) |
This method is to check if this peripheral is capable to be set as up as asynchronous.
- Returns
- if it cna be async
Reimplemented from com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.
Definition at line 208 of file PPMReaderChannel.java.
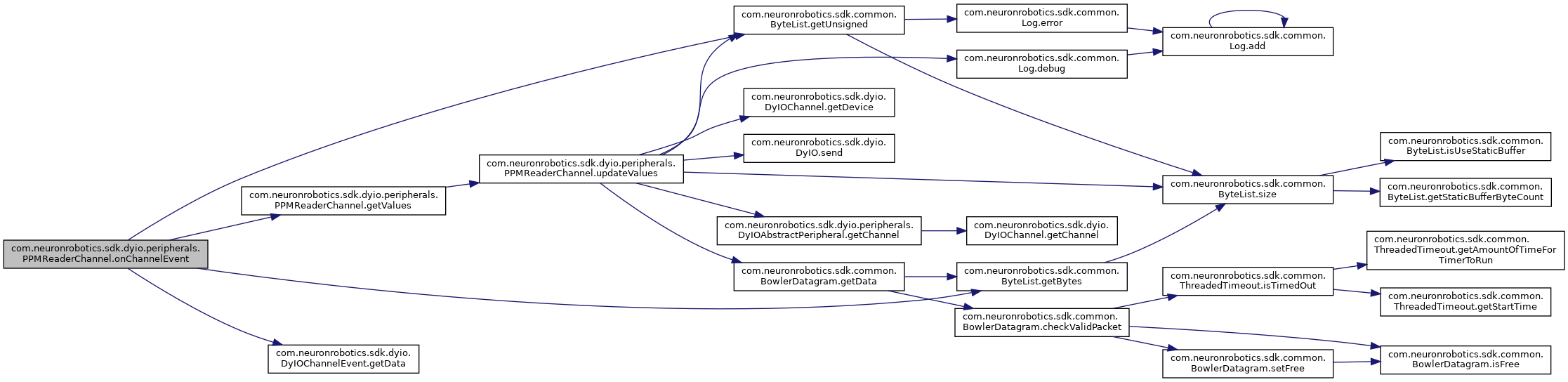
◆ onChannelEvent()
| void com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.onChannelEvent | ( | DyIOChannelEvent | e | ) |
On channel event.
- Parameters
-
e the e
Implements com.neuronrobotics.sdk.dyio.IChannelEventListener.
Definition at line 186 of file PPMReaderChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.crossLinks, com.neuronrobotics.sdk.common.ByteList.getBytes(), com.neuronrobotics.sdk.dyio.DyIOChannelEvent.getData(), com.neuronrobotics.sdk.common.ByteList.getUnsigned(), and com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.getValues().
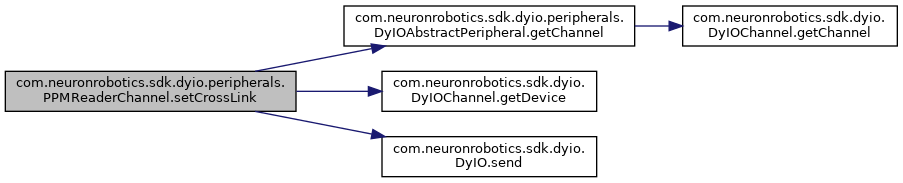
◆ setCrossLink()
| void com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.setCrossLink | ( | int[] | links | ) |
This sets up the PPM cross link. For each PPM channel you can assign it one DyIO output channel as its direct control. Indecies in the array corospond to the PPM channel, and values corospond to the DyIO output channel
- Parameters
-
links an array of channel numbers corosponding to the PPM channel to do a direct 1:1 mapping
Definition at line 78 of file PPMReaderChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.crossLinks, com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.getChannel(), com.neuronrobotics.sdk.dyio.DyIOChannel.getDevice(), com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.myMode, com.neuronrobotics.sdk.common.BowlerMethod.POST, and com.neuronrobotics.sdk.dyio.DyIO.send().
Referenced by com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.stopAllCrossLinks().
◆ stopAllCrossLinks()
| void com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.stopAllCrossLinks | ( | ) |
Shut down the internal corss link system.
Definition at line 65 of file PPMReaderChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.crossLinks, com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.NO_CROSSLINK, and com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.setCrossLink().

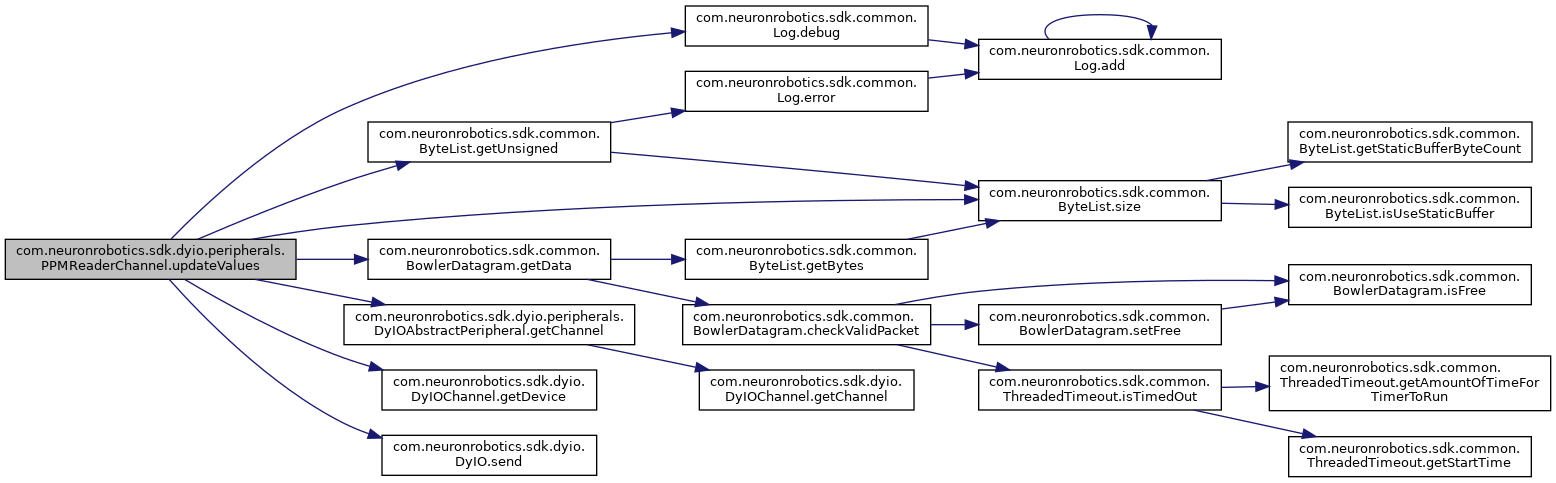
◆ updateValues()
|
private |
Update values.
Definition at line 133 of file PPMReaderChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.crossLinks, com.neuronrobotics.sdk.common.Log.debug(), com.neuronrobotics.sdk.common.BowlerMethod.GET, com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.getChannel(), com.neuronrobotics.sdk.common.BowlerDatagram.getData(), com.neuronrobotics.sdk.dyio.DyIOChannel.getDevice(), com.neuronrobotics.sdk.common.ByteList.getUnsigned(), com.neuronrobotics.sdk.dyio.DyIO.send(), and com.neuronrobotics.sdk.common.ByteList.size().
Referenced by com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.getCrossLink(), and com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.getValues().
Member Data Documentation
◆ crossLinks
|
private |
The cross links.
Definition at line 31 of file PPMReaderChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.getCrossLink(), com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.onChannelEvent(), com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.setCrossLink(), com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.stopAllCrossLinks(), and com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.updateValues().
◆ myMode
|
staticprivate |
The Constant myMode.
Definition at line 28 of file PPMReaderChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.PPMReaderChannel(), and com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.setCrossLink().
◆ NO_CROSSLINK
|
static |
The Constant NO_CROSSLINK.
Definition at line 37 of file PPMReaderChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.stopAllCrossLinks().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/dyio/peripherals/PPMReaderChannel.java