

 Public Member Functions inherited from
Public Member Functions inherited from Detailed Description
The Class UARTRxChannel.
Definition at line 284 of file UARTChannel.java.
Constructor & Destructor Documentation
◆ UARTRxChannel()
| com.neuronrobotics.sdk.dyio.peripherals.UARTChannel.UARTRxChannel.UARTRxChannel | ( | DyIOChannel | channel | ) |
Instantiates a new UART rx channel.
- Parameters
-
channel the channel
Definition at line 294 of file UARTChannel.java.
References com.neuronrobotics.sdk.dyio.DyIOChannel.addChannelEventListener(), and com.neuronrobotics.sdk.dyio.DyIOChannelMode.USART_RX.

Member Function Documentation
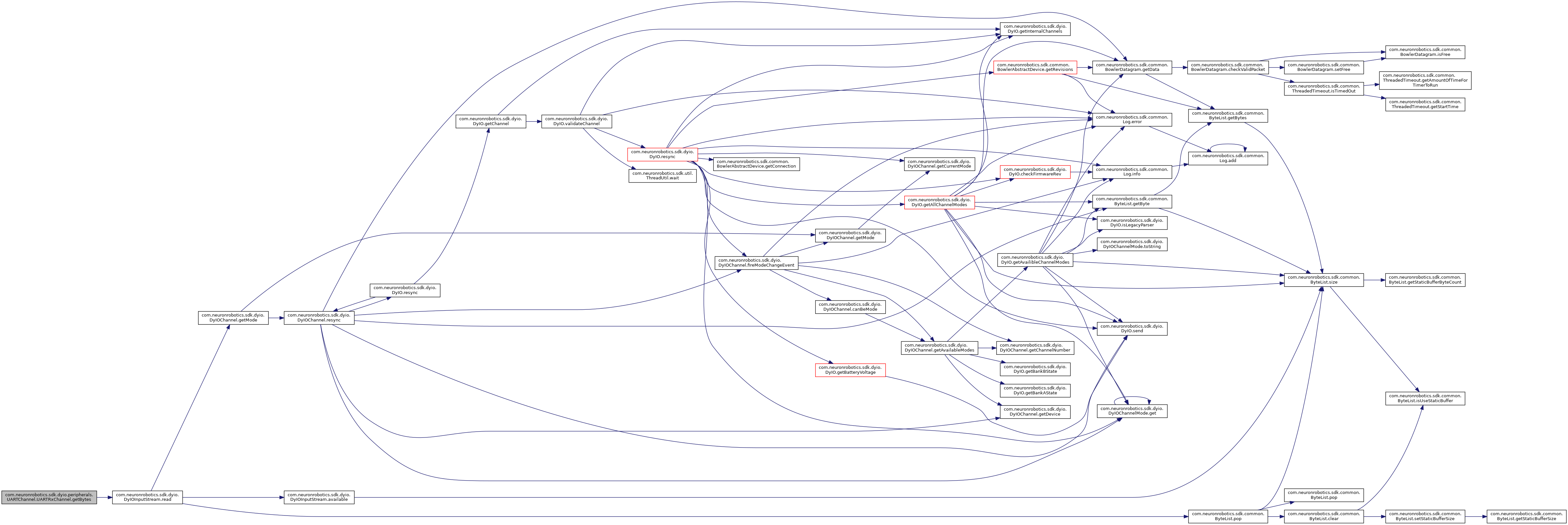
◆ getBytes()
| byte [] com.neuronrobotics.sdk.dyio.peripherals.UARTChannel.UARTRxChannel.getBytes | ( | int | inStreamSize | ) |
Gets the bytes.
- Parameters
-
inStreamSize the in stream size
- Returns
- the bytes
Definition at line 327 of file UARTChannel.java.
References com.neuronrobotics.sdk.dyio.DyIOInputStream.read().
Referenced by com.neuronrobotics.sdk.dyio.peripherals.UARTChannel.getBytes().
◆ getInputStream()
| DyIOInputStream com.neuronrobotics.sdk.dyio.peripherals.UARTChannel.UARTRxChannel.getInputStream | ( | ) |
◆ getInStreamSize()
| int com.neuronrobotics.sdk.dyio.peripherals.UARTChannel.UARTRxChannel.getInStreamSize | ( | ) |
Gets the in stream size.
- Returns
- the in stream size
Definition at line 317 of file UARTChannel.java.
References com.neuronrobotics.sdk.dyio.DyIOInputStream.available().
Referenced by com.neuronrobotics.sdk.dyio.peripherals.UARTChannel.getBytes(), and com.neuronrobotics.sdk.dyio.peripherals.UARTChannel.getInStreamSize().

◆ hasAsync()
| boolean com.neuronrobotics.sdk.dyio.peripherals.UARTChannel.UARTRxChannel.hasAsync | ( | ) |
This method is to check if this peripheral is capable to be set as up as asynchronous.
- Returns
- if it cna be async
Reimplemented from com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.
Definition at line 356 of file UARTChannel.java.
◆ onChannelEvent()
| void com.neuronrobotics.sdk.dyio.peripherals.UARTChannel.UARTRxChannel.onChannelEvent | ( | DyIOChannelEvent | e | ) |
On channel event.
- Parameters
-
e the e
Implements com.neuronrobotics.sdk.dyio.IChannelEventListener.
Definition at line 307 of file UARTChannel.java.
References com.neuronrobotics.sdk.dyio.DyIOChannelEvent.getData(), and com.neuronrobotics.sdk.dyio.DyIOInputStream.write().

The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/dyio/peripherals/UARTChannel.java