Public Member Functions | |
| PWMOutputChannel (int channel) | |
| PWMOutputChannel (DyIO dyio, int channel) | |
| PWMOutputChannel (DyIOChannel channel) | |
| void | SetDutyPercent (float duty) |
| boolean | hasAsync () |
 Public Member Functions inherited from com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral Public Member Functions inherited from com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral | |
| DyIOAbstractPeripheral (DyIOChannel channel, DyIOChannelMode myMode, boolean async) | |
| DyIOChannelMode | getClassMode () |
| boolean | isEnabled () |
| boolean | setMode () |
| boolean | setMode (boolean async) |
| boolean | setMode (DyIOChannelMode mode, boolean async) |
| DyIOChannel | getChannel () |
| DyIOChannelMode | getMode () |
| boolean | setValue (int value) throws InvalidResponseException |
| boolean | setValue (ByteList value) throws InvalidResponseException |
| int | getValue () throws InvalidResponseException |
| boolean | SavePosition (int pos) |
| boolean | configAdvancedAsyncNotEqual () |
| boolean | configAdvancedAsyncDeadBand (int deadbandSize) |
| boolean | configAdvancedAsyncTreshhold (int threshholdValue, AsyncThreshholdEdgeType edgeType) |
| boolean | configAdvancedAsyncAutoSample () |
| boolean | configAdvancedAsyncNotEqual (int msTime) |
| boolean | configAdvancedAsyncDeadBand (int msTime, int deadbandSize) |
| boolean | configAdvancedAsyncTreshhold (int msTime, int threshholdValue, AsyncThreshholdEdgeType edgeType) |
| boolean | configAdvancedAsyncAutoSample (int msTime) |
| boolean | flush () |
| void | setAsync (boolean b) |
| int | getConfiguration () |
Detailed Description
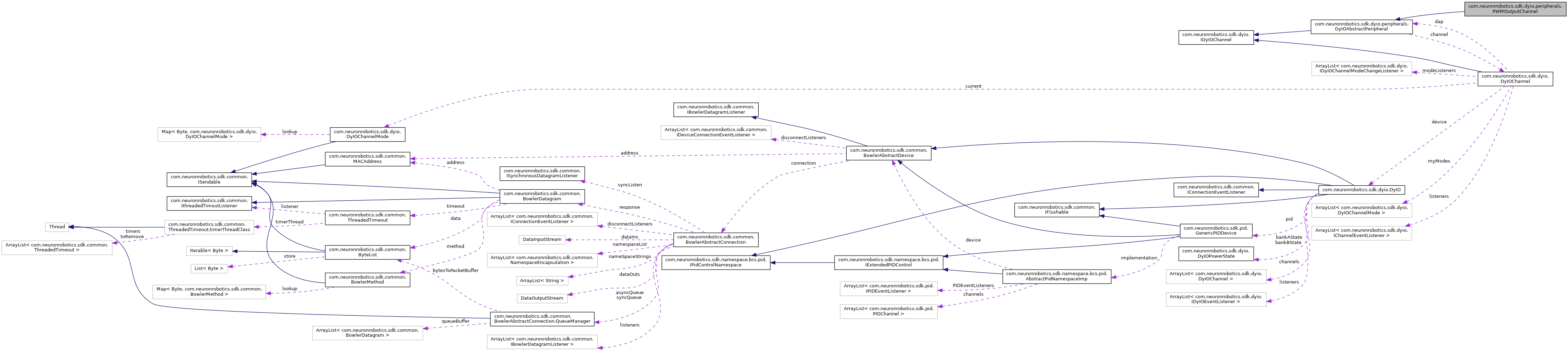
The Class PWMOutputChannel.
Definition at line 27 of file PWMOutputChannel.java.
Constructor & Destructor Documentation
◆ PWMOutputChannel() [1/3]
| com.neuronrobotics.sdk.dyio.peripherals.PWMOutputChannel.PWMOutputChannel | ( | int | channel | ) |
Constructor. Creates an counter input input channel that is syncronous only by default.
- Parameters
-
channel - the channel object requested from the DyIO
Definition at line 35 of file PWMOutputChannel.java.
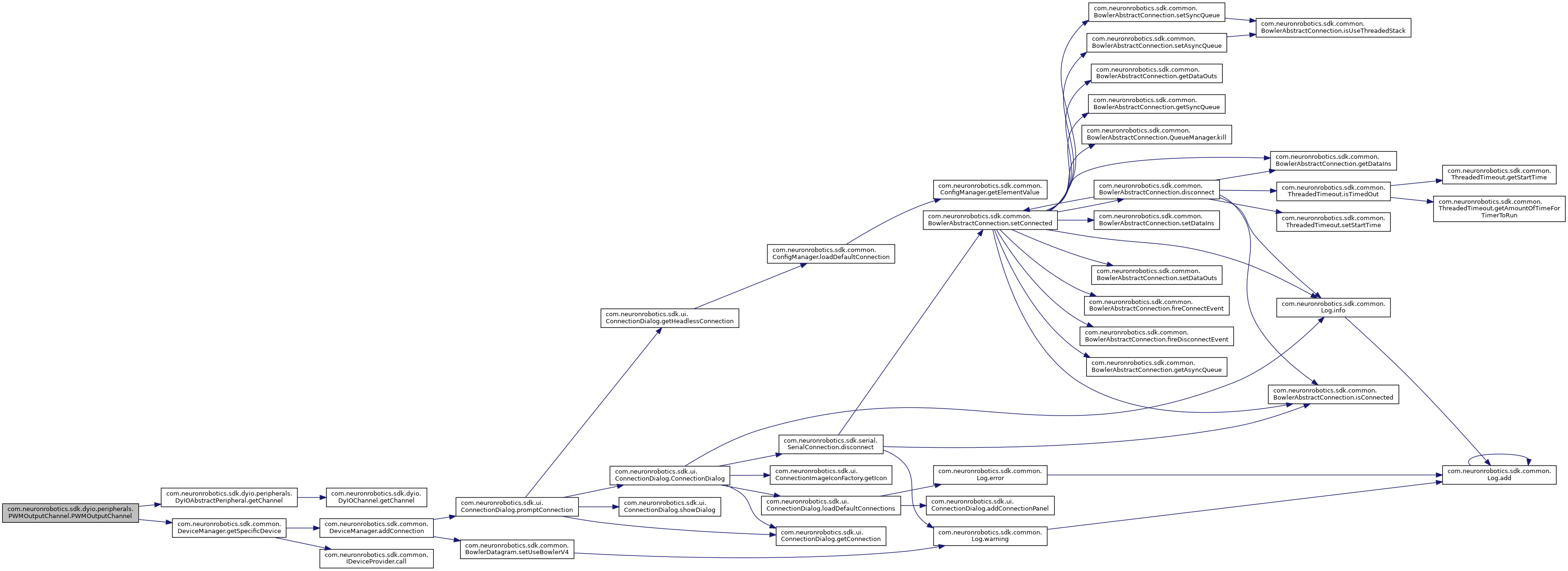
References com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.channel, com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.getChannel(), and com.neuronrobotics.sdk.common.DeviceManager.getSpecificDevice().
◆ PWMOutputChannel() [2/3]
| com.neuronrobotics.sdk.dyio.peripherals.PWMOutputChannel.PWMOutputChannel | ( | DyIO | dyio, |
| int | channel | ||
| ) |
Constructor. Creates an counter input input channel that is syncronous only by default.
- Parameters
-
dyio the dyio channel - the channel object requested from the DyIO
Definition at line 46 of file PWMOutputChannel.java.
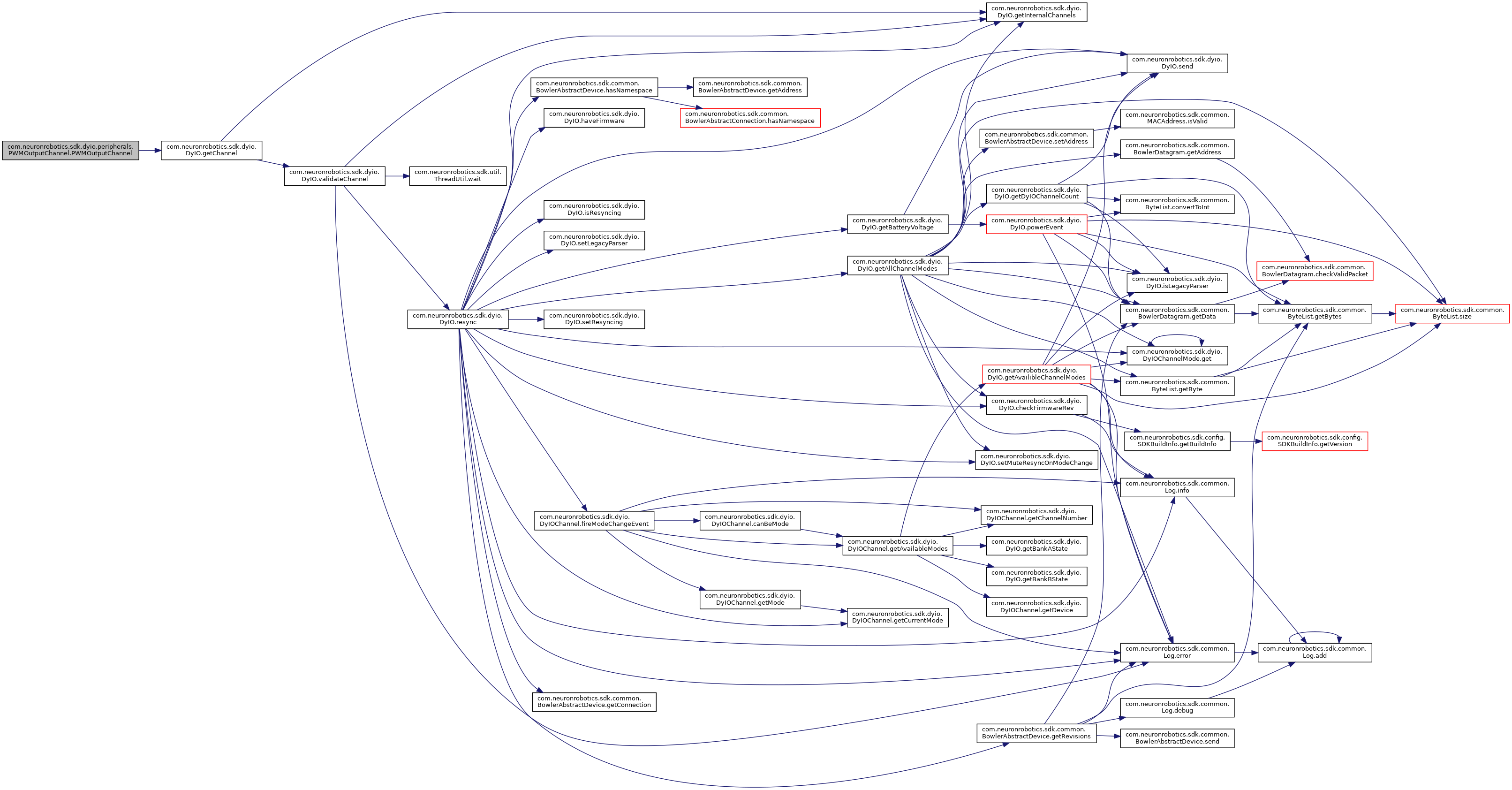
References com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.channel, and com.neuronrobotics.sdk.dyio.DyIO.getChannel().
◆ PWMOutputChannel() [3/3]
| com.neuronrobotics.sdk.dyio.peripherals.PWMOutputChannel.PWMOutputChannel | ( | DyIOChannel | channel | ) |
- Parameters
-
channel The channel object to set up as a full duty, hardware PWM
Definition at line 57 of file PWMOutputChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.channel, com.neuronrobotics.sdk.dyio.DyIOChannelMode.PWM_OUT, and com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.setMode().

Member Function Documentation
◆ hasAsync()
| boolean com.neuronrobotics.sdk.dyio.peripherals.PWMOutputChannel.hasAsync | ( | ) |
This method is to check if this peripheral is capable to be set as up as asynchronous.
- Returns
- if it cna be async
Reimplemented from com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.
Definition at line 88 of file PWMOutputChannel.java.
◆ SetDutyPercent()
| void com.neuronrobotics.sdk.dyio.peripherals.PWMOutputChannel.SetDutyPercent | ( | float | duty | ) |
This takes in a duty cycle in percent time on 100 is 100% on and 0 is 0% on.
- Parameters
-
duty the duty
Definition at line 71 of file PWMOutputChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.setValue().

The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/dyio/peripherals/PWMOutputChannel.java