

 Public Member Functions inherited from
Public Member Functions inherited from Protected Member Functions | |
| void | fireOnCounterOutput (int value) |
Private Member Functions | |
| void | init (DyIOChannel channel, boolean isAsync) |
| boolean | validate () |
Private Attributes | |
| ArrayList< ICounterOutputListener > | listeners = new ArrayList<ICounterOutputListener>() |
Detailed Description
The Class CounterOutputChannel.
Definition at line 34 of file CounterOutputChannel.java.
Constructor & Destructor Documentation
◆ CounterOutputChannel() [1/4]
| com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.CounterOutputChannel | ( | int | channel | ) |
Constructor. Creates an counter input input channel that is syncronous only by default.
- Parameters
-
channel - the channel object requested from the DyIO
Definition at line 45 of file CounterOutputChannel.java.
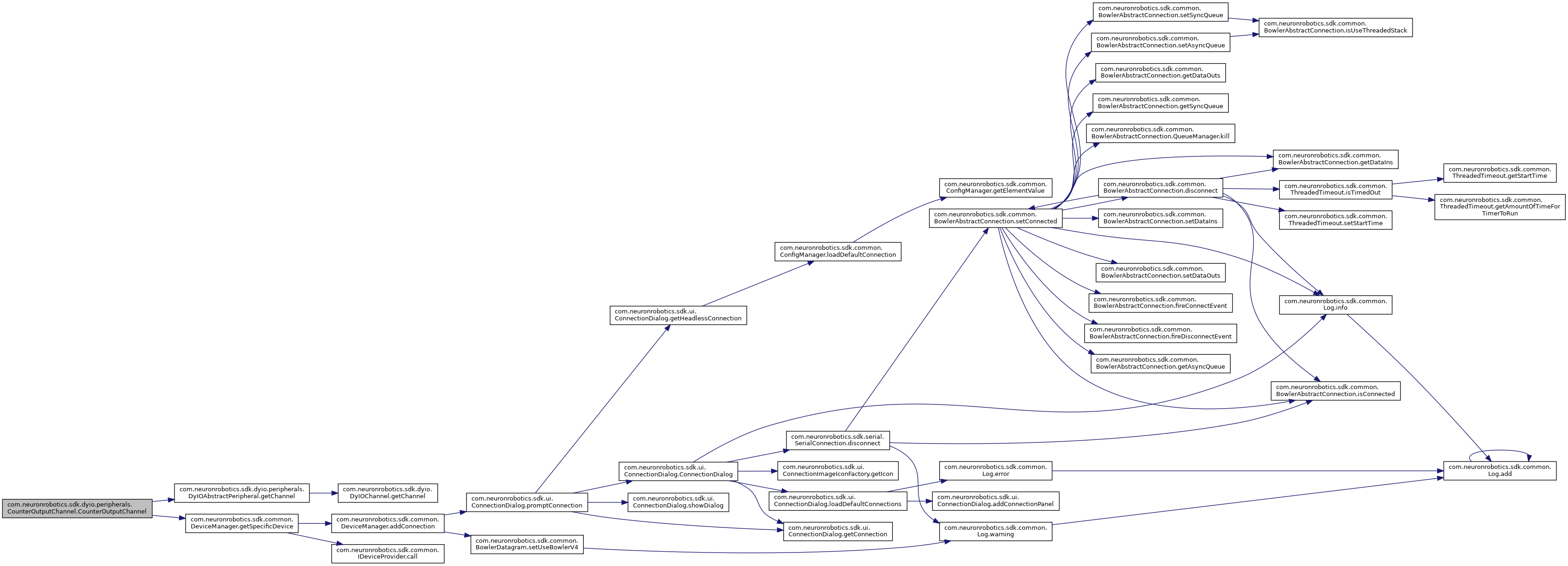
References com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.channel, com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.getChannel(), and com.neuronrobotics.sdk.common.DeviceManager.getSpecificDevice().
◆ CounterOutputChannel() [2/4]
| com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.CounterOutputChannel | ( | DyIO | dyio, |
| int | channel | ||
| ) |
Constructor. Creates an counter input input channel that is syncronous only by default.
- Parameters
-
dyio the dyio channel - the channel object requested from the DyIO
Definition at line 56 of file CounterOutputChannel.java.
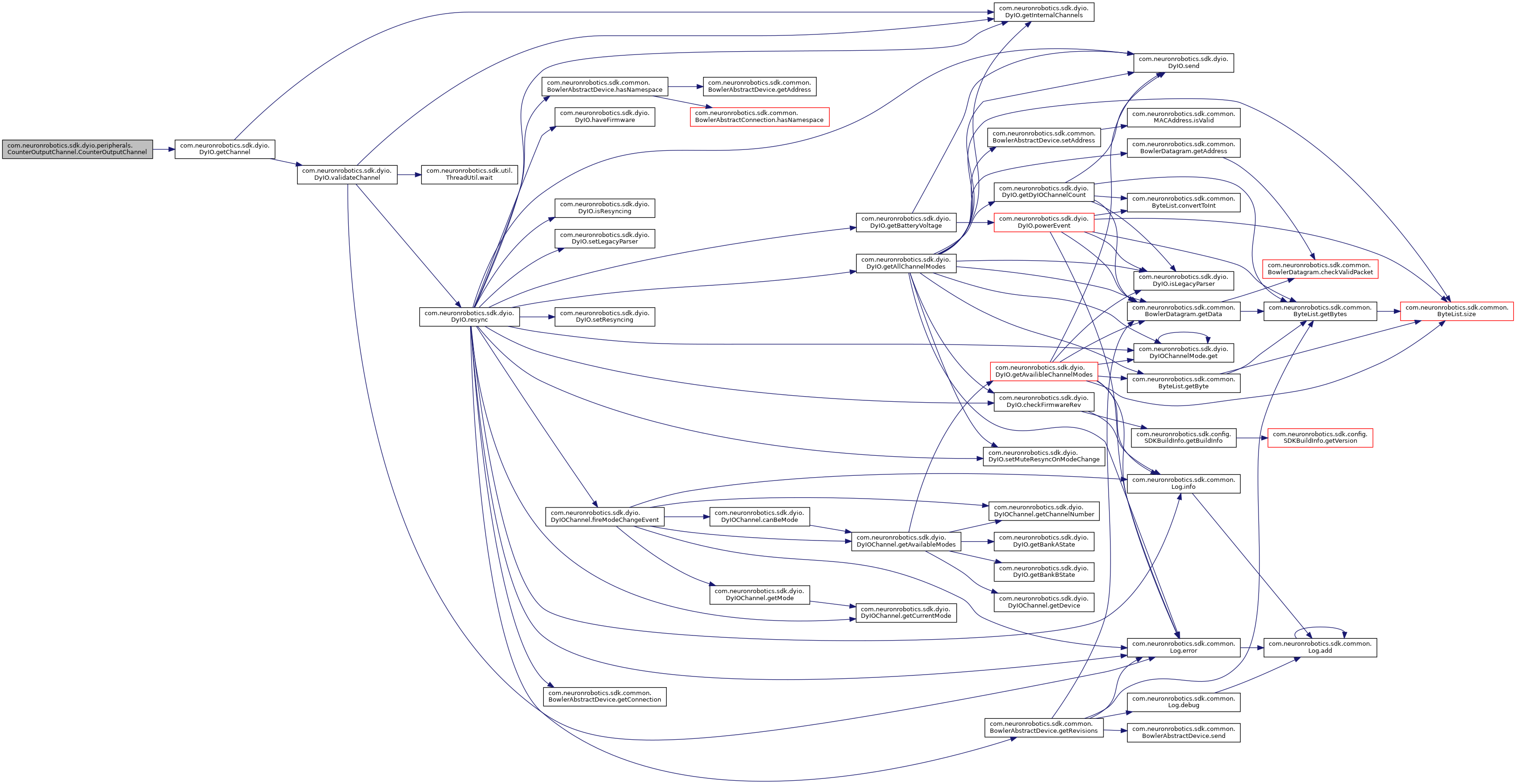
References com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.channel, and com.neuronrobotics.sdk.dyio.DyIO.getChannel().
◆ CounterOutputChannel() [3/4]
| com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.CounterOutputChannel | ( | DyIOChannel | channel | ) |
Constructor. Creates an counter input input channel that is syncronous only by default.
- Parameters
-
channel - the channel object requested from the DyIO
Definition at line 66 of file CounterOutputChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.channel.
◆ CounterOutputChannel() [4/4]
| com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.CounterOutputChannel | ( | DyIOChannel | channel, |
| boolean | isAsync | ||
| ) |
Instantiates a new counter output channel.
- Parameters
-
channel the channel isAsync the is async
Definition at line 76 of file CounterOutputChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.channel, com.neuronrobotics.sdk.dyio.DyIOChannelMode.COUNT_OUT_INT, and com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.init().
Member Function Documentation
◆ addCounterOutputListener()
| void com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.addCounterOutputListener | ( | ICounterOutputListener | l | ) |
addCounterOutputListener.
- Parameters
-
l add this listener to this channels event listeners
Definition at line 132 of file CounterOutputChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.listeners.
◆ fireOnCounterOutput()
|
protected |
Fire on counter output.
- Parameters
-
value the value
Definition at line 166 of file CounterOutputChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.listeners.
Referenced by com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.onChannelEvent().
◆ hasAsync()
| boolean com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.hasAsync | ( | ) |
This method is to check if this peripheral is capable to be set as up as asynchronous.
- Returns
- if it cna be async
Reimplemented from com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.
Definition at line 196 of file CounterOutputChannel.java.
◆ init()
|
private |
Inits the.
- Parameters
-
channel the channel isAsync the is async
Definition at line 87 of file CounterOutputChannel.java.
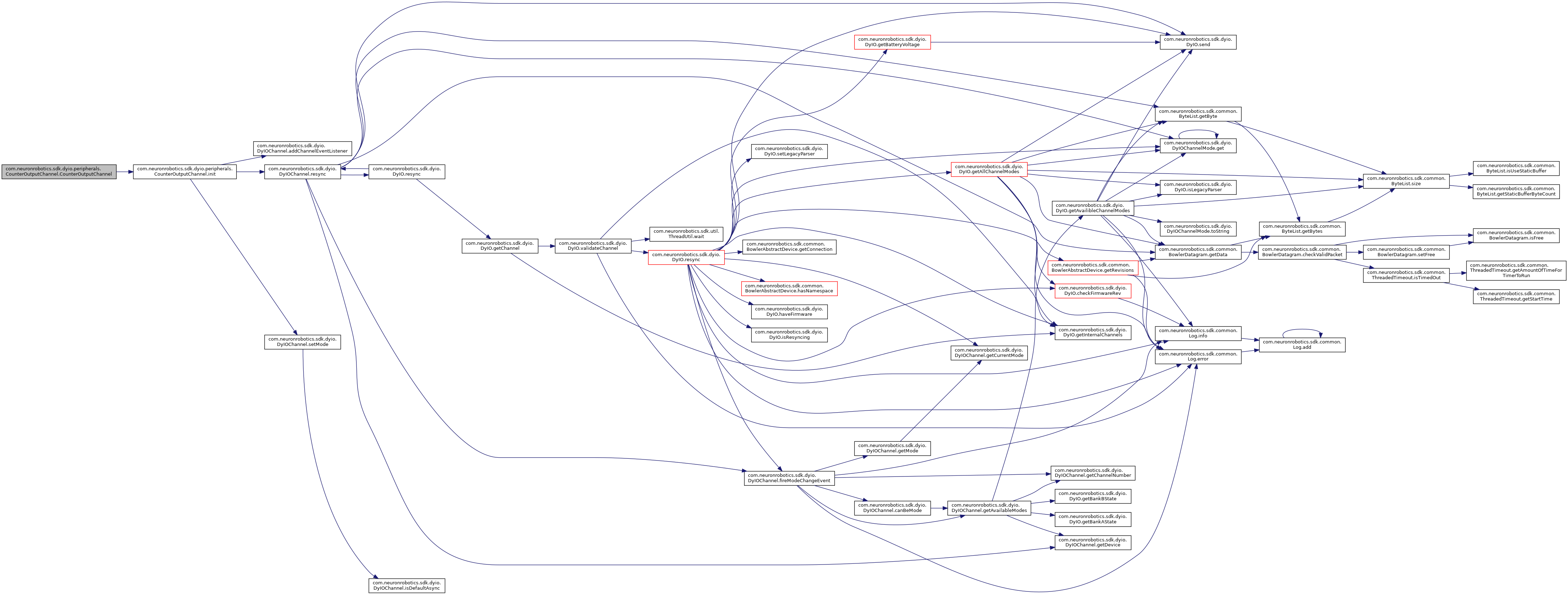
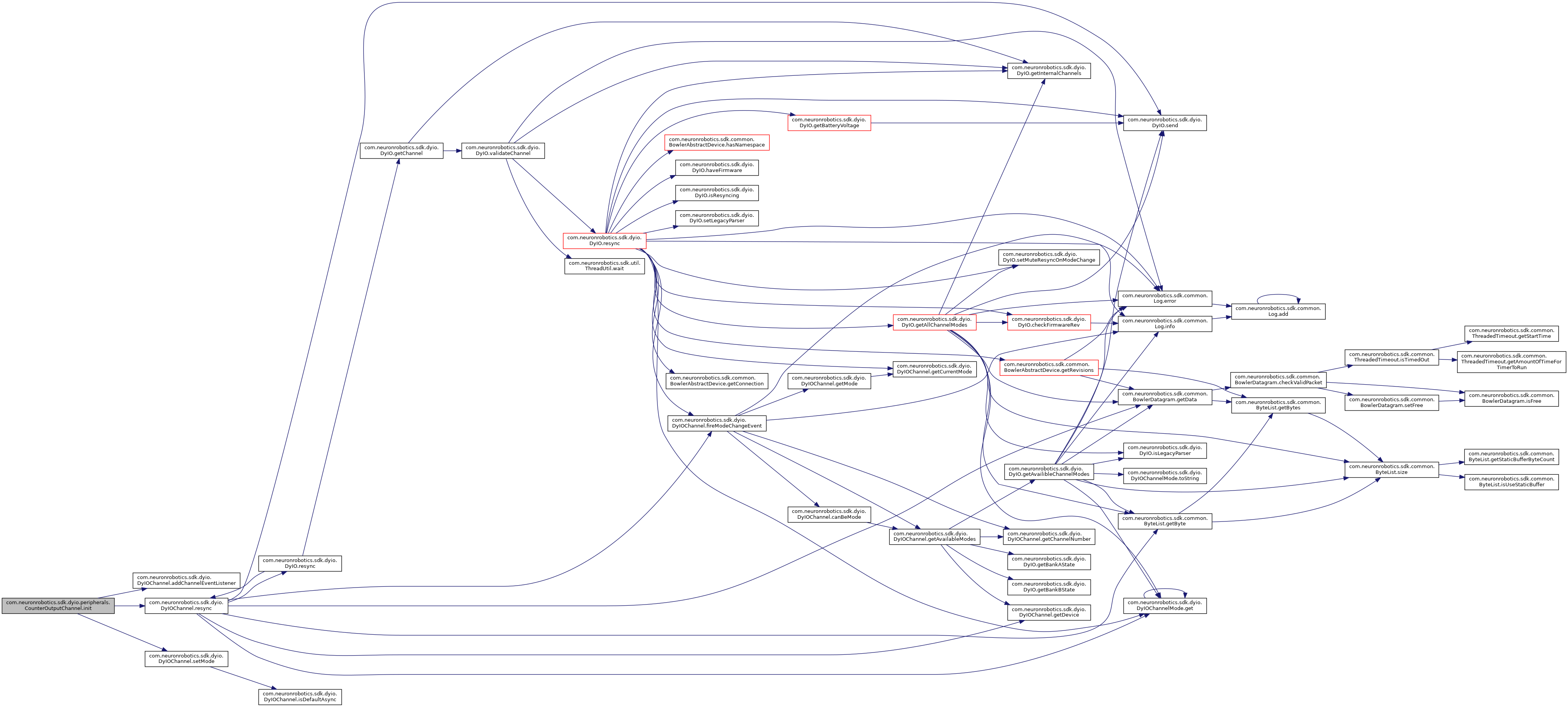
References com.neuronrobotics.sdk.dyio.DyIOChannel.addChannelEventListener(), com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.channel, com.neuronrobotics.sdk.dyio.DyIOChannelMode.COUNT_OUT_INT, com.neuronrobotics.sdk.dyio.DyIOChannel.resync(), and com.neuronrobotics.sdk.dyio.DyIOChannel.setMode().
Referenced by com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.CounterOutputChannel().
◆ onChannelEvent()
| void com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.onChannelEvent | ( | DyIOChannelEvent | e | ) |
onChannelEvent Send the counter value to all the listening objects.
- Parameters
-
e the e
Implements com.neuronrobotics.sdk.dyio.IChannelEventListener.
Definition at line 189 of file CounterOutputChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.fireOnCounterOutput(), and com.neuronrobotics.sdk.dyio.DyIOChannelEvent.getSignedValue().

◆ removeAllCounterOutputListeners()
| void com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.removeAllCounterOutputListeners | ( | ) |
Removes the all counter output listeners.
Definition at line 157 of file CounterOutputChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.listeners.
◆ removeCounterOutputListener()
| void com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.removeCounterOutputListener | ( | ICounterOutputListener | l | ) |
removeCounterOutputListener.
- Parameters
-
l remove this listener to this channels event listeners
Definition at line 146 of file CounterOutputChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.listeners.
◆ setAsync()
| void com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.setAsync | ( | boolean | isAsync | ) |
Sets the async.
- Parameters
-
isAsync the new async
Reimplemented from com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.
Definition at line 205 of file CounterOutputChannel.java.
References com.neuronrobotics.sdk.dyio.DyIOChannelMode.COUNT_OUT_INT, and com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.setMode().

◆ SetPosition() [1/2]
| boolean com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.SetPosition | ( | int | pos | ) |
Set the Counter to a given position.
- Parameters
-
pos the pos
- Returns
- if the action was successful
Definition at line 102 of file CounterOutputChannel.java.
◆ SetPosition() [2/2]
| boolean com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.SetPosition | ( | int | pos, |
| float | time | ||
| ) |
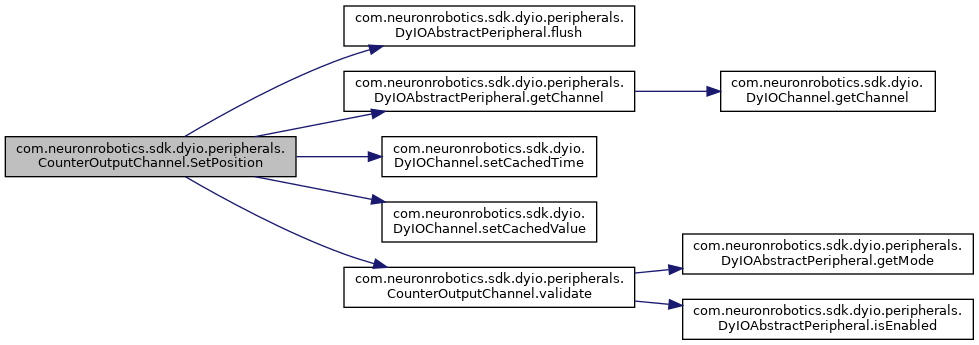
Steps the Counter though a transformation over a given amount of time.
- Parameters
-
pos - the end position time - the number of seconds for the transition to take place
- Returns
- if the action was successful
Definition at line 113 of file CounterOutputChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.flush(), com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.getChannel(), com.neuronrobotics.sdk.dyio.DyIOChannel.setCachedTime(), com.neuronrobotics.sdk.dyio.DyIOChannel.setCachedValue(), and com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.validate().
◆ setValue()
| boolean com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.setValue | ( | int | value | ) |
This method sets the value of the output of the giver peripheral.
- Parameters
-
value Sets this value to the channel
- Returns
- if the set worked
- Exceptions
-
InvalidResponseException the invalid response exception
Reimplemented from com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.
Definition at line 176 of file CounterOutputChannel.java.
References com.neuronrobotics.sdk.common.ByteList.addAs32(), and com.neuronrobotics.sdk.common.Log.info().

◆ validate()
|
private |
Validate.
- Returns
- true, if successful
Definition at line 214 of file CounterOutputChannel.java.
References com.neuronrobotics.sdk.dyio.DyIOChannelMode.COUNT_OUT_INT, com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.getMode(), and com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.isEnabled().
Referenced by com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.SetPosition().

Member Data Documentation
◆ listeners
|
private |
The listeners.
Definition at line 37 of file CounterOutputChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.addCounterOutputListener(), com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.fireOnCounterOutput(), com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.removeAllCounterOutputListeners(), and com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.removeCounterOutputListener().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/dyio/peripherals/CounterOutputChannel.java