Public Member Functions | |
| DeltaRobotKinematics (DeltaRobotConfig config) | |
| TransformNR | delta_calcForward (double[] input) |
| double[] | delta_calcInverse (TransformNR input) |
| double | getE () |
| double | getF () |
| double | getRe () |
| double | getRf () |
Private Member Functions | |
| double | delta_calcAngleYZ (double x0, double y0, double z0) |
Private Attributes | |
| double | sqrt3 = Math.sqrt(3.0) |
| double | pi = Math.PI |
| double | sin120 = sqrt3/2.0 |
| double | cos120 = -0.5 |
| double | tan60 = sqrt3 |
| double | sin30 = 0.5 |
| double | tan30 = 1/sqrt3 |
Detailed Description
The Class DeltaRobotKinematics.
Definition at line 10 of file DeltaRobotKinematics.java.
Constructor & Destructor Documentation
◆ DeltaRobotKinematics()
| com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.DeltaRobotKinematics | ( | DeltaRobotConfig | config | ) |
All units in milimeters.
- Parameters
-
config the config
Definition at line 22 of file DeltaRobotKinematics.java.
Member Function Documentation
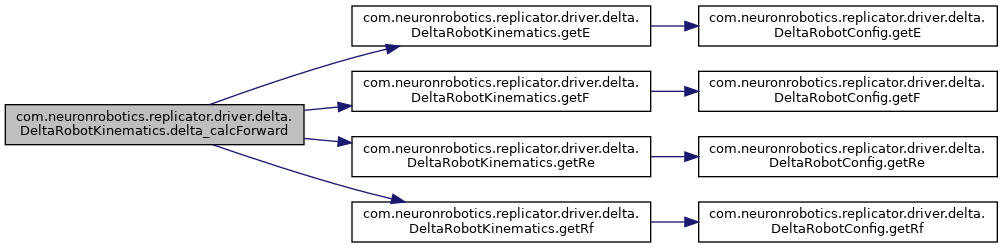
◆ delta_calcAngleYZ()
|
private |
Delta_calc angle yz.
- Parameters
-
x0 the x0 y0 the y0 z0 the z0
- Returns
- the double
Definition at line 118 of file DeltaRobotKinematics.java.
References com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.getE(), com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.getF(), com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.getRe(), and com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.getRf().
Referenced by com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcInverse().
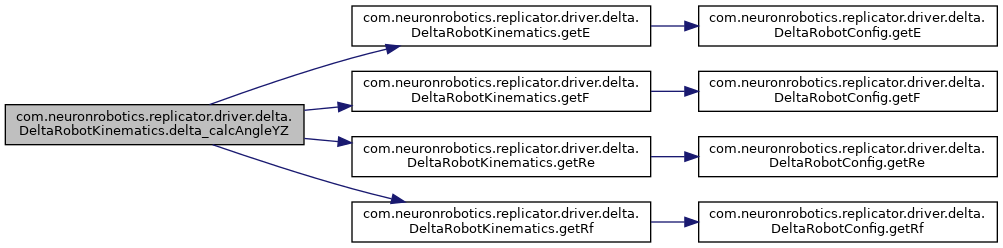
◆ delta_calcForward()
| TransformNR com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcForward | ( | double[] | input | ) |
Delta_calc forward.
- Parameters
-
input the input
- Returns
- the transform nr
Definition at line 57 of file DeltaRobotKinematics.java.
References com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.getE(), com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.getF(), com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.getRe(), com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.getRf(), com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.sin30, com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.tan30, and com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.tan60.
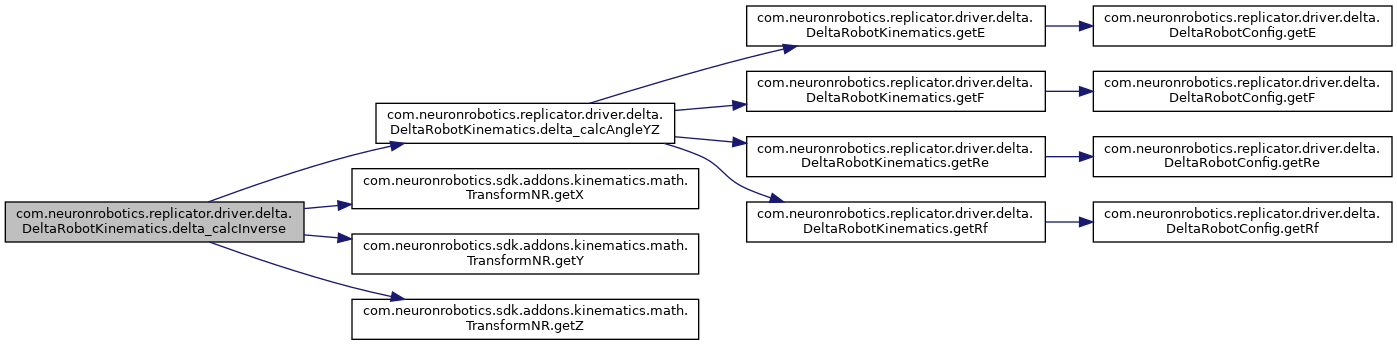
◆ delta_calcInverse()
| double [] com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcInverse | ( | TransformNR | input | ) |
Delta_calc inverse.
- Parameters
-
input the input
- Returns
- the double[]
Definition at line 145 of file DeltaRobotKinematics.java.
References com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.cos120, com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcAngleYZ(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getX(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getY(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getZ(), and com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.sin120.
◆ getE()
| double com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.getE | ( | ) |
Gets the e.
- Returns
- the e
Definition at line 165 of file DeltaRobotKinematics.java.
References com.neuronrobotics.replicator.driver.delta.DeltaRobotConfig.getE().
Referenced by com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcAngleYZ(), and com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcForward().

◆ getF()
| double com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.getF | ( | ) |
Gets the f.
- Returns
- the f
Definition at line 174 of file DeltaRobotKinematics.java.
References com.neuronrobotics.replicator.driver.delta.DeltaRobotConfig.getF().
Referenced by com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcAngleYZ(), and com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcForward().

◆ getRe()
| double com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.getRe | ( | ) |
Gets the re.
- Returns
- the re
Definition at line 183 of file DeltaRobotKinematics.java.
References com.neuronrobotics.replicator.driver.delta.DeltaRobotConfig.getRe().
Referenced by com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcAngleYZ(), and com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcForward().

◆ getRf()
| double com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.getRf | ( | ) |
Gets the rf.
- Returns
- the rf
Definition at line 192 of file DeltaRobotKinematics.java.
References com.neuronrobotics.replicator.driver.delta.DeltaRobotConfig.getRf().
Referenced by com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcAngleYZ(), and com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcForward().

Member Data Documentation
◆ cos120
|
private |
The cos120.
Definition at line 38 of file DeltaRobotKinematics.java.
Referenced by com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcInverse().
◆ pi
|
private |
The pi.
Definition at line 32 of file DeltaRobotKinematics.java.
◆ sin120
|
private |
The sin120.
Definition at line 35 of file DeltaRobotKinematics.java.
Referenced by com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcInverse().
◆ sin30
|
private |
The sin30.
Definition at line 44 of file DeltaRobotKinematics.java.
Referenced by com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcForward().
◆ sqrt3
|
private |
The sqrt3.
Definition at line 29 of file DeltaRobotKinematics.java.
◆ tan30
|
private |
The tan30.
Definition at line 47 of file DeltaRobotKinematics.java.
Referenced by com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcForward().
◆ tan60
|
private |
The tan60.
Definition at line 41 of file DeltaRobotKinematics.java.
Referenced by com.neuronrobotics.replicator.driver.delta.DeltaRobotKinematics.delta_calcForward().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/replicator/driver/delta/DeltaRobotKinematics.java