Public Member Functions | |
| BezierEditor (String URL, String file, int numPoints) throws InvalidRemoteException, TransportException, GitAPIException, IOException | |
| BezierEditor (File data, int numPoints) | |
| ArrayList< CSG > | getCSG () |
| ArrayList< Object > | get () |
| void | update () |
| void | setEnd (double newX, double newY, double newZ) |
| void | setStart (double newX, double newY, double newZ) |
| void | setCP1 (double newX, double newY, double newZ) |
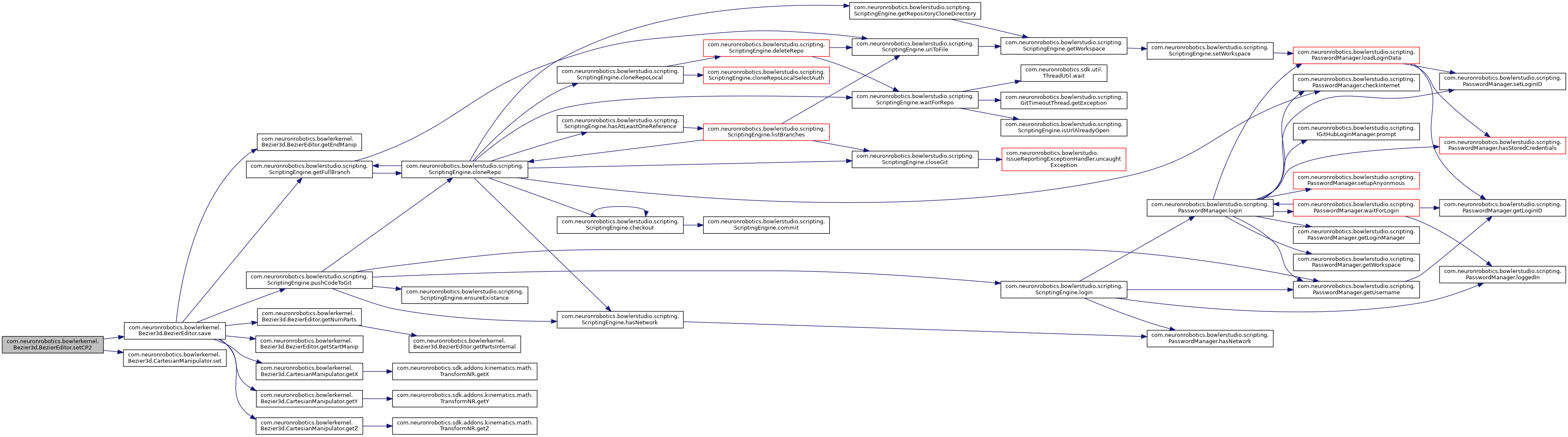
| void | setCP2 (double newX, double newY, double newZ) |
| void | setStart (Vector3d point) |
| void | setCP1 (Vector3d point) |
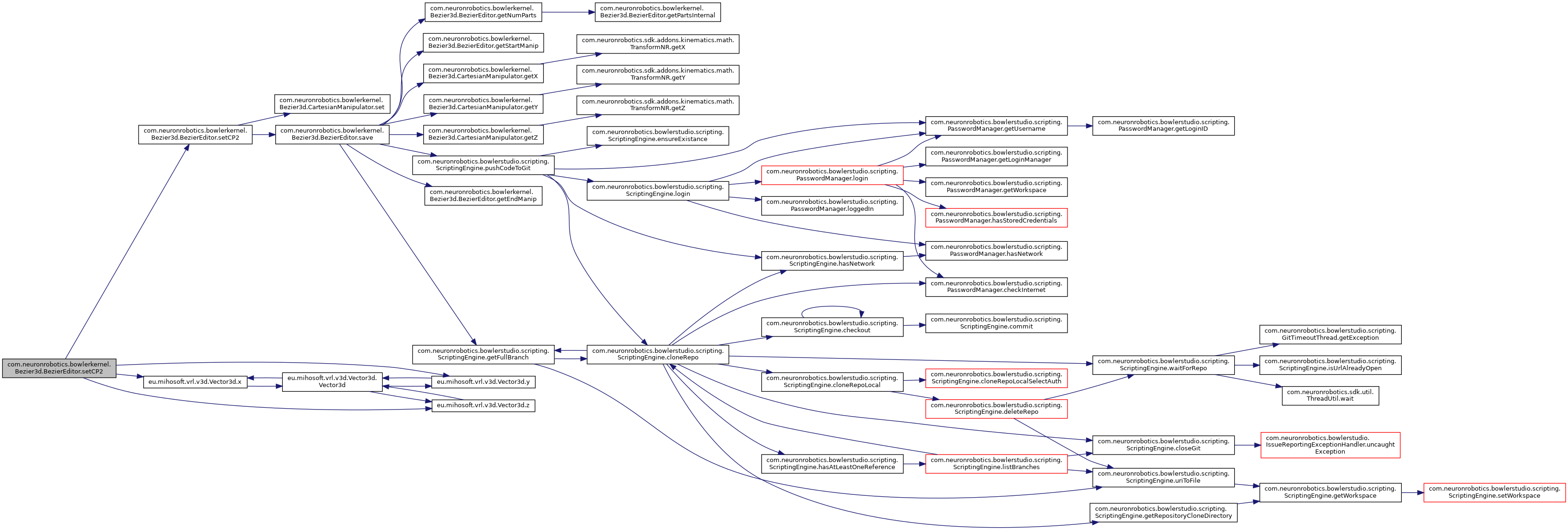
| void | setCP2 (Vector3d point) |
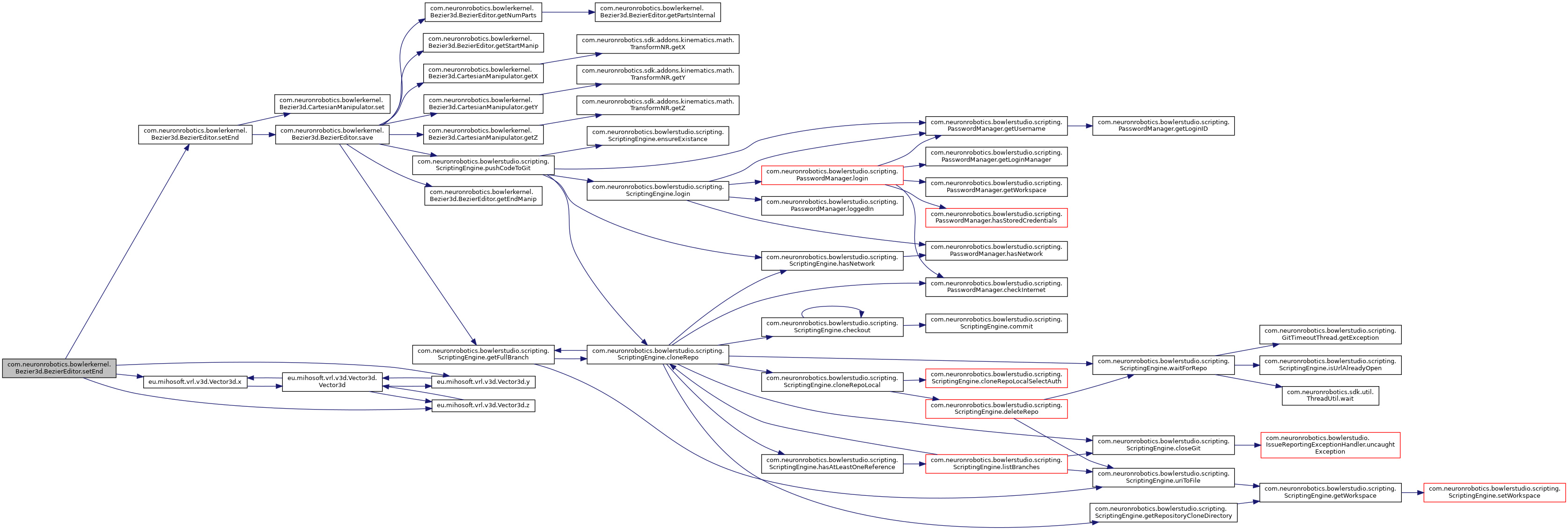
| void | setEnd (Vector3d point) |
| ArrayList< Transform > | transforms () |
| void | save () |
| CartesianManipulator | getEndManip () |
| CartesianManipulator | getStartManip () |
| void | setStartManip (CartesianManipulator start) |
| void | addBezierToTheEnd (BezierEditor b) |
| ArrayList< CSG > | getPartsInternal () |
| void | setPartsInternal (ArrayList< CSG > partsInternal) |
Private Member Functions | |
| TransformNR | updateLines (CartesianManipulator m, CartesianManipulator p, Line l, Affine poseAF) |
| int | getNumParts () |
Private Attributes | |
| ArrayList< CSG > | partsInternal = null |
| CartesianManipulator | endManip |
| CartesianManipulator | start |
| String | url |
| String | gitfile |
| boolean | saving |
| ArrayList< BezierEditor > | nextBez = new ArrayList<>() |
| Line | cp1Line = new Line() |
| Line | cp2Line = new Line() |
| Affine | cp1LinePose = new Affine() |
| Affine | cp2LinePose = new Affine() |
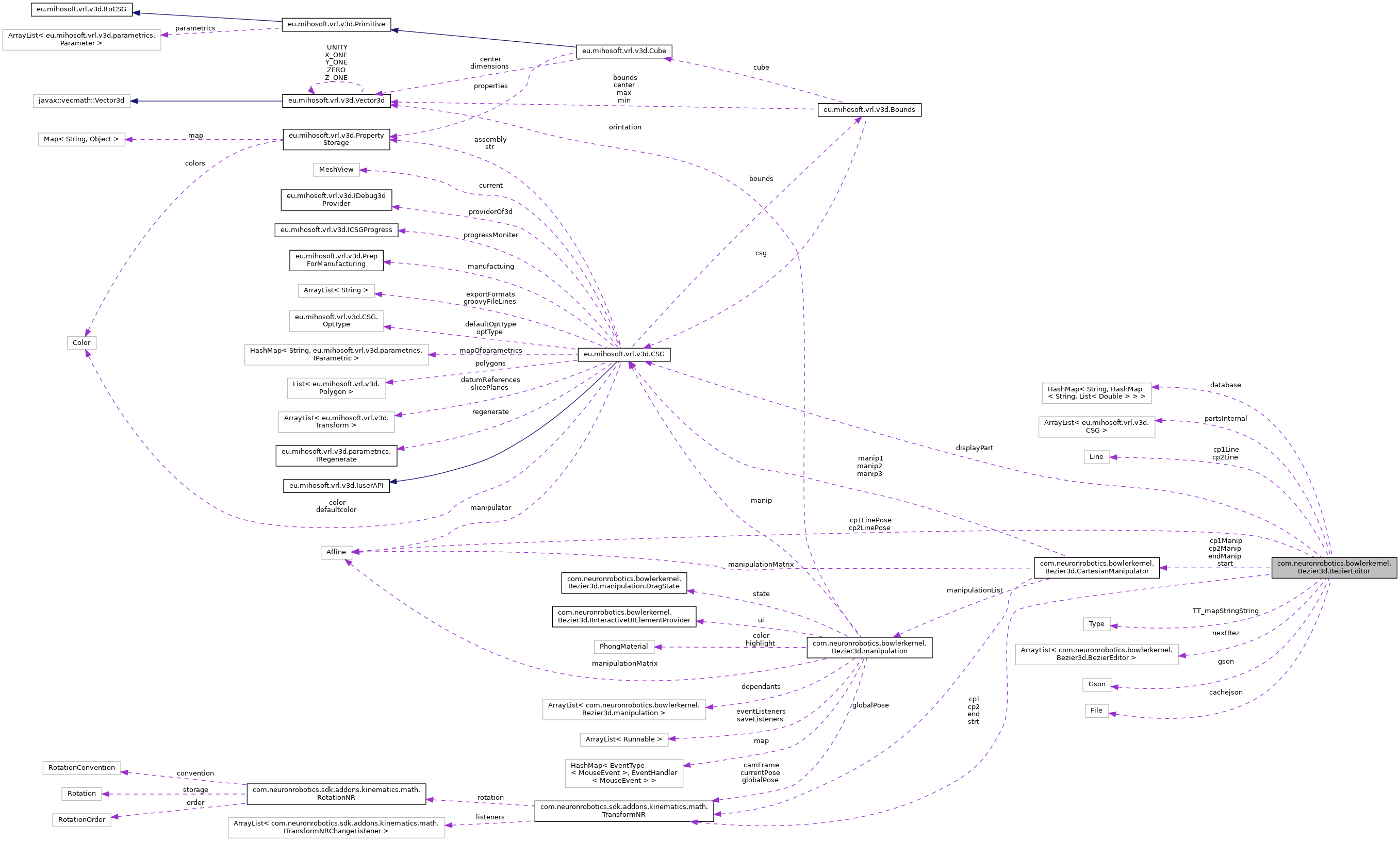
Detailed Description
Definition at line 42 of file BezierEditor.java.
Constructor & Destructor Documentation
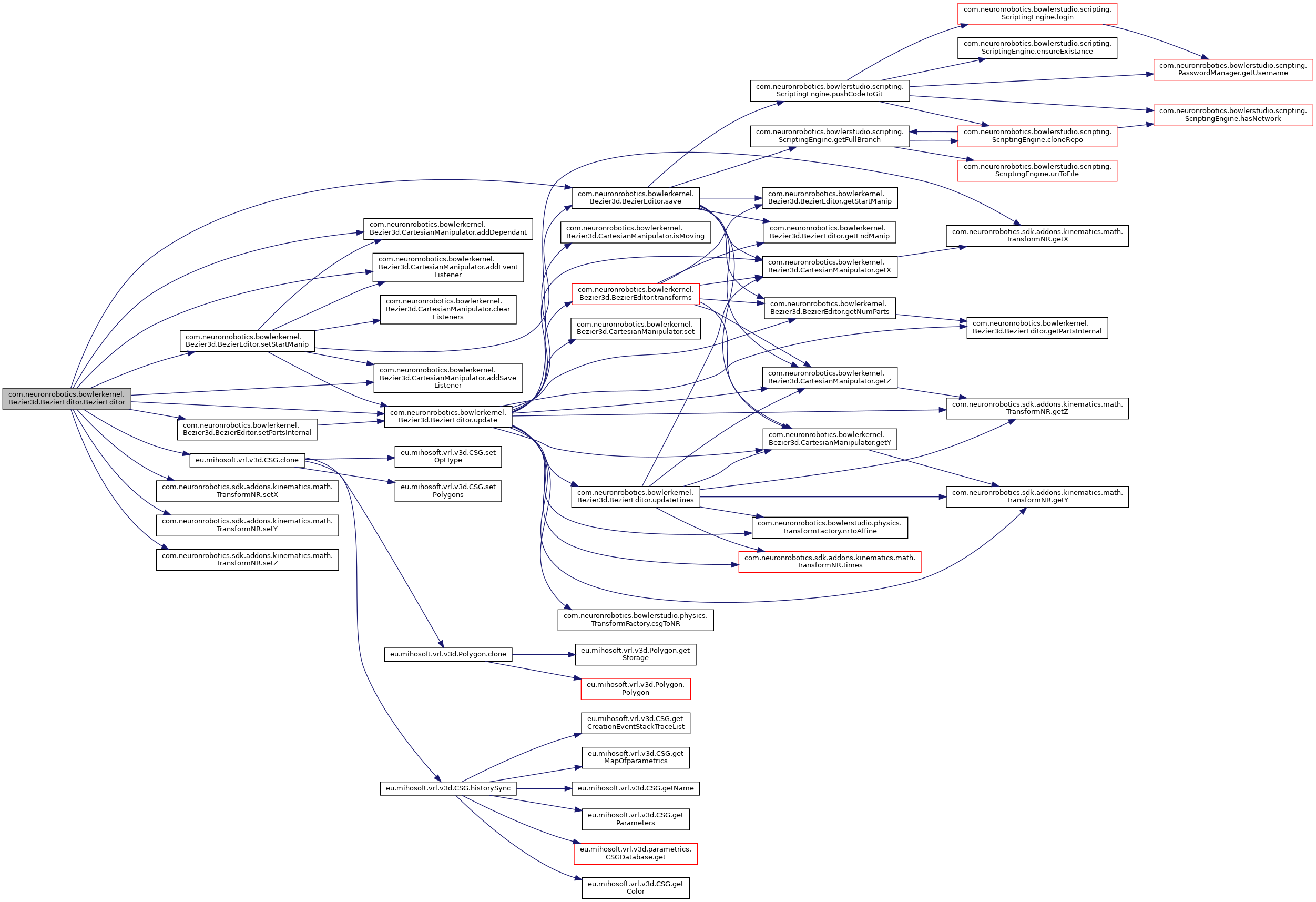
◆ BezierEditor() [1/2]
| com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor | ( | String | URL, |
| String | file, | ||
| int | numPoints | ||
| ) | throws InvalidRemoteException, TransportException, GitAPIException, IOException |
Definition at line 69 of file BezierEditor.java.
References com.neuronrobotics.bowlerstudio.scripting.ScriptingEngine.fileFromGit(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.gitfile, and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.url.

◆ BezierEditor() [2/2]
| com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor | ( | File | data, |
| int | numPoints | ||
| ) |
Definition at line 76 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.addDependant(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.addEventListener(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.addSaveListener(), eu.mihosoft.vrl.v3d.CSG.clone(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.cp1Line, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.cp2Line, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.cp2LinePose, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.endManip, com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationMatrix, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setPartsInternal(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStartManip(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.setX(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.setY(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.setZ(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
Member Function Documentation
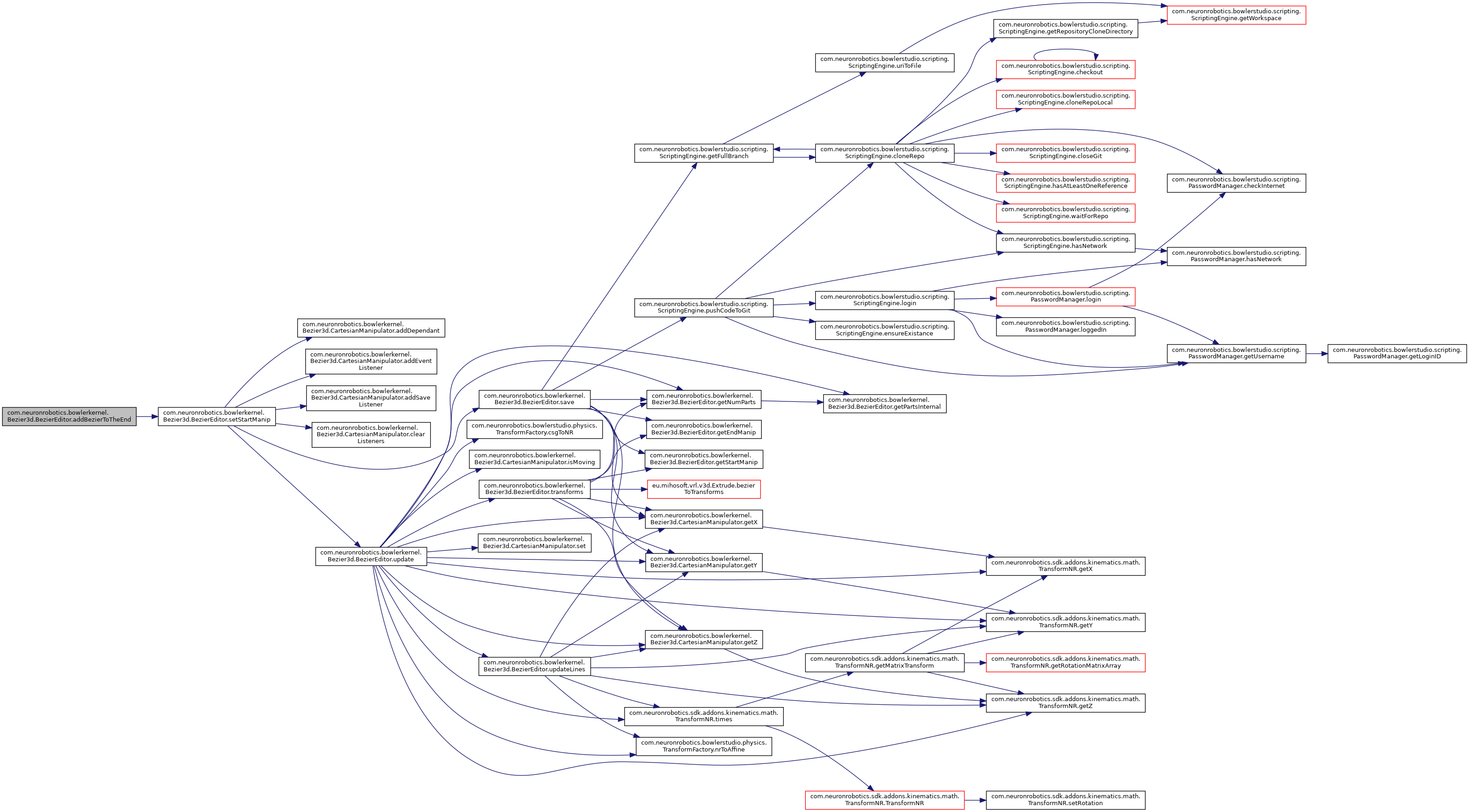
◆ addBezierToTheEnd()
| void com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.addBezierToTheEnd | ( | BezierEditor | b | ) |
Definition at line 392 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.endManip, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.nextBez, and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStartManip().
◆ get()
| ArrayList<Object> com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.get | ( | ) |
Definition at line 176 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.cp1Line, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.cp2Line, and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getCSG().
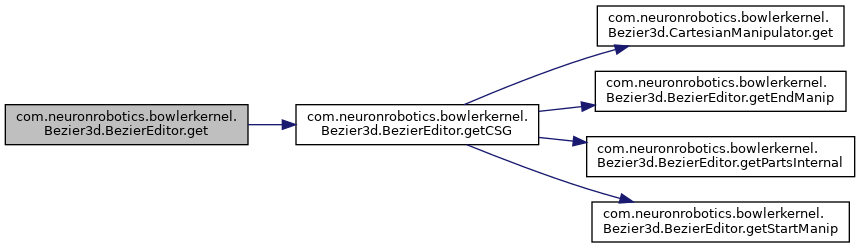
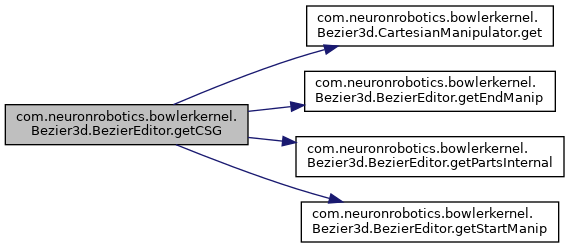
◆ getCSG()
| ArrayList<CSG> com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getCSG | ( | ) |
Definition at line 165 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.get(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getEndManip(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getPartsInternal(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getStartManip().
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.get().
◆ getEndManip()
| CartesianManipulator com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getEndManip | ( | ) |
Definition at line 365 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.endManip.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getCSG(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.transforms().
◆ getNumParts()
|
private |
Definition at line 307 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getPartsInternal().
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.transforms(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().

◆ getPartsInternal()
| ArrayList<CSG> com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getPartsInternal | ( | ) |
Definition at line 397 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.partsInternal.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getCSG(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getNumParts(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
◆ getStartManip()
| CartesianManipulator com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getStartManip | ( | ) |
Definition at line 372 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.start.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getCSG(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStart(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.transforms().
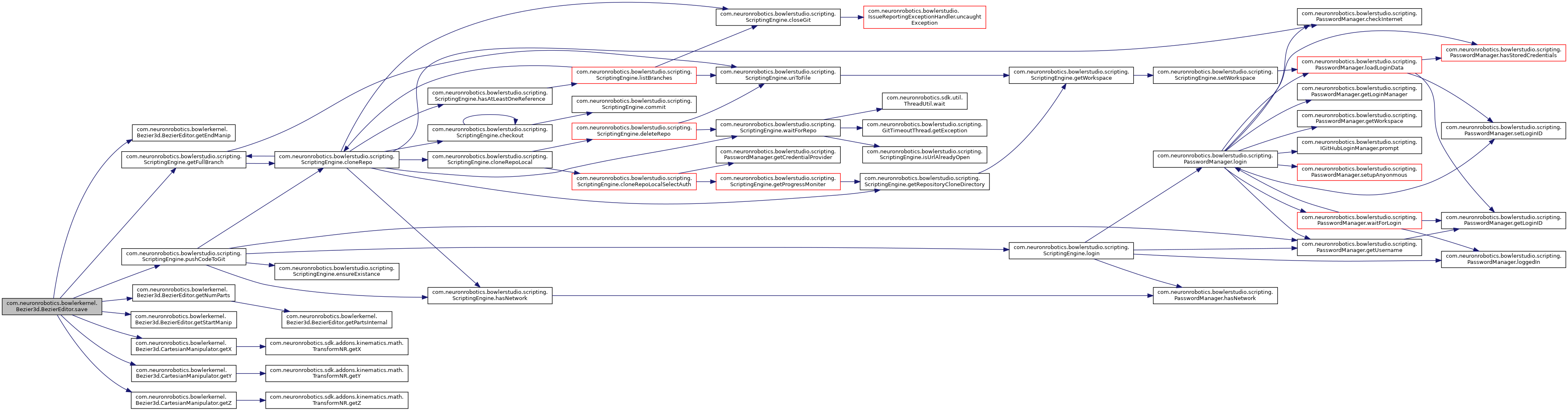
◆ save()
| void com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save | ( | ) |
Definition at line 311 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getEndManip(), com.neuronrobotics.bowlerstudio.scripting.ScriptingEngine.getFullBranch(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getNumParts(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getStartManip(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getX(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getY(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getZ(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.gitfile, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.nextBez, com.neuronrobotics.bowlerstudio.scripting.ScriptingEngine.pushCodeToGit(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.saving, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.start, and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.url.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setCP1(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setCP2(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setEnd(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStart(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStartManip().
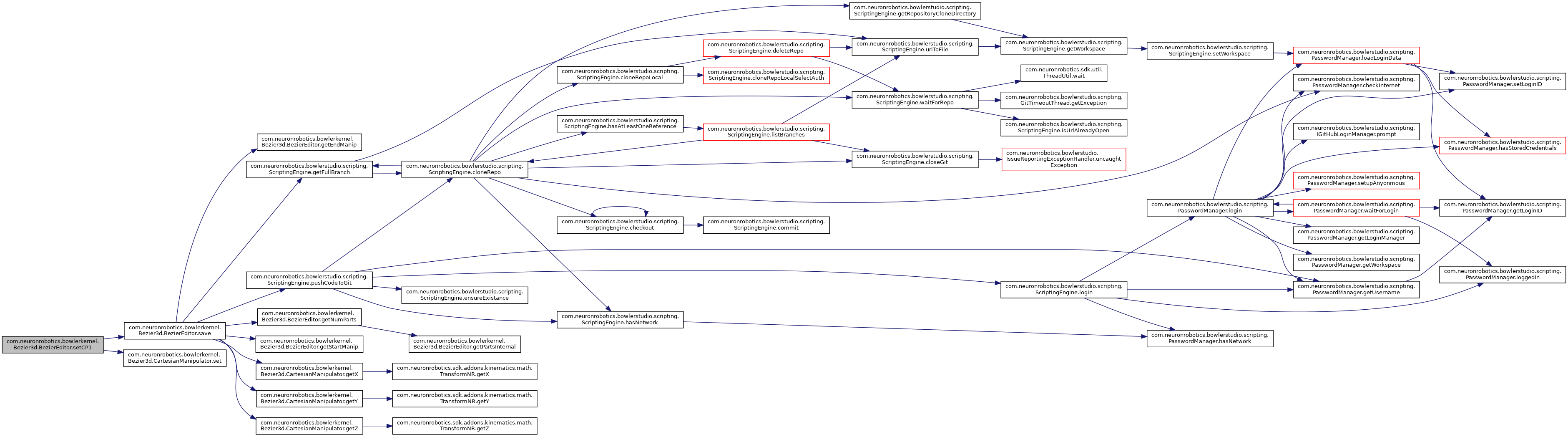
◆ setCP1() [1/2]
| void com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setCP1 | ( | double | newX, |
| double | newY, | ||
| double | newZ | ||
| ) |
Definition at line 262 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save(), and com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.set().
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setCP1().
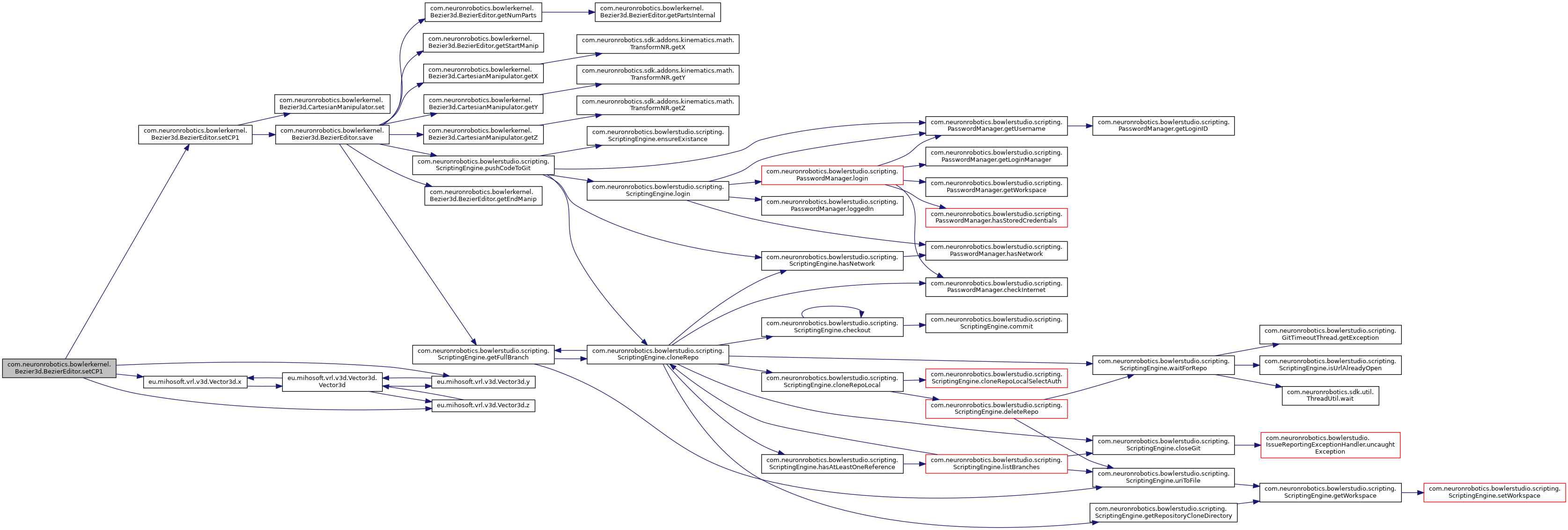
◆ setCP1() [2/2]
| void com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setCP1 | ( | Vector3d | point | ) |
Definition at line 277 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setCP1(), eu.mihosoft.vrl.v3d.Vector3d.x(), eu.mihosoft.vrl.v3d.Vector3d.y(), and eu.mihosoft.vrl.v3d.Vector3d.z().
◆ setCP2() [1/2]
| void com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setCP2 | ( | double | newX, |
| double | newY, | ||
| double | newZ | ||
| ) |
Definition at line 268 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save(), and com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.set().
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setCP2().
◆ setCP2() [2/2]
| void com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setCP2 | ( | Vector3d | point | ) |
Definition at line 281 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setCP2(), eu.mihosoft.vrl.v3d.Vector3d.x(), eu.mihosoft.vrl.v3d.Vector3d.y(), and eu.mihosoft.vrl.v3d.Vector3d.z().
◆ setEnd() [1/2]
| void com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setEnd | ( | double | newX, |
| double | newY, | ||
| double | newZ | ||
| ) |
Definition at line 251 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.endManip, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save(), and com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.set().
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setEnd().
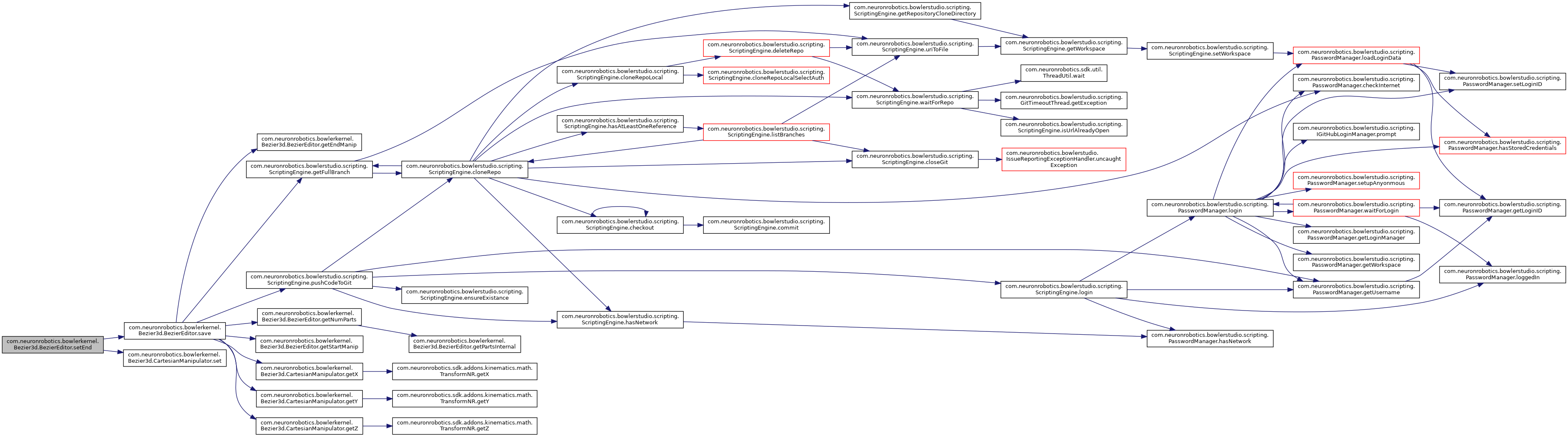
◆ setEnd() [2/2]
| void com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setEnd | ( | Vector3d | point | ) |
Definition at line 285 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setEnd(), eu.mihosoft.vrl.v3d.Vector3d.x(), eu.mihosoft.vrl.v3d.Vector3d.y(), and eu.mihosoft.vrl.v3d.Vector3d.z().
◆ setPartsInternal()
| void com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setPartsInternal | ( | ArrayList< CSG > | partsInternal | ) |
Definition at line 401 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.partsInternal, and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor().
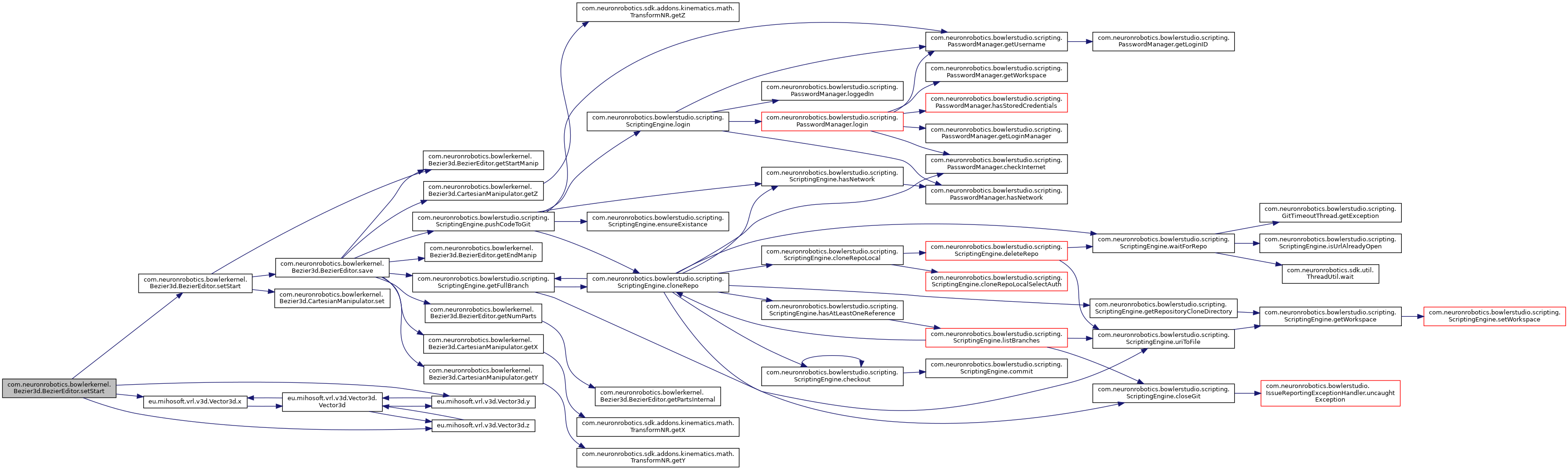
◆ setStart() [1/2]
| void com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStart | ( | double | newX, |
| double | newY, | ||
| double | newZ | ||
| ) |
Definition at line 256 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getStartManip(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save(), and com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.set().
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStart().
◆ setStart() [2/2]
| void com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStart | ( | Vector3d | point | ) |
Definition at line 273 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStart(), eu.mihosoft.vrl.v3d.Vector3d.x(), eu.mihosoft.vrl.v3d.Vector3d.y(), and eu.mihosoft.vrl.v3d.Vector3d.z().
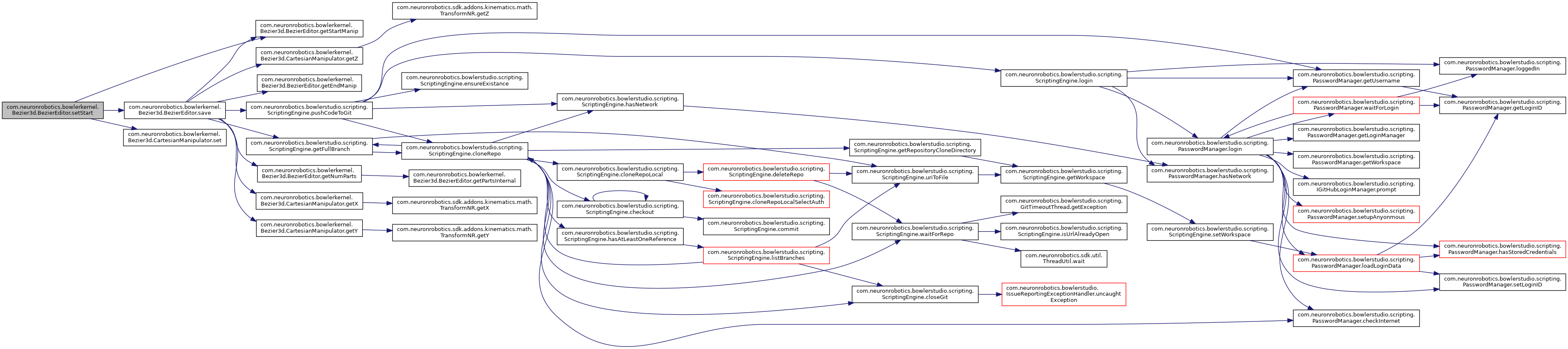
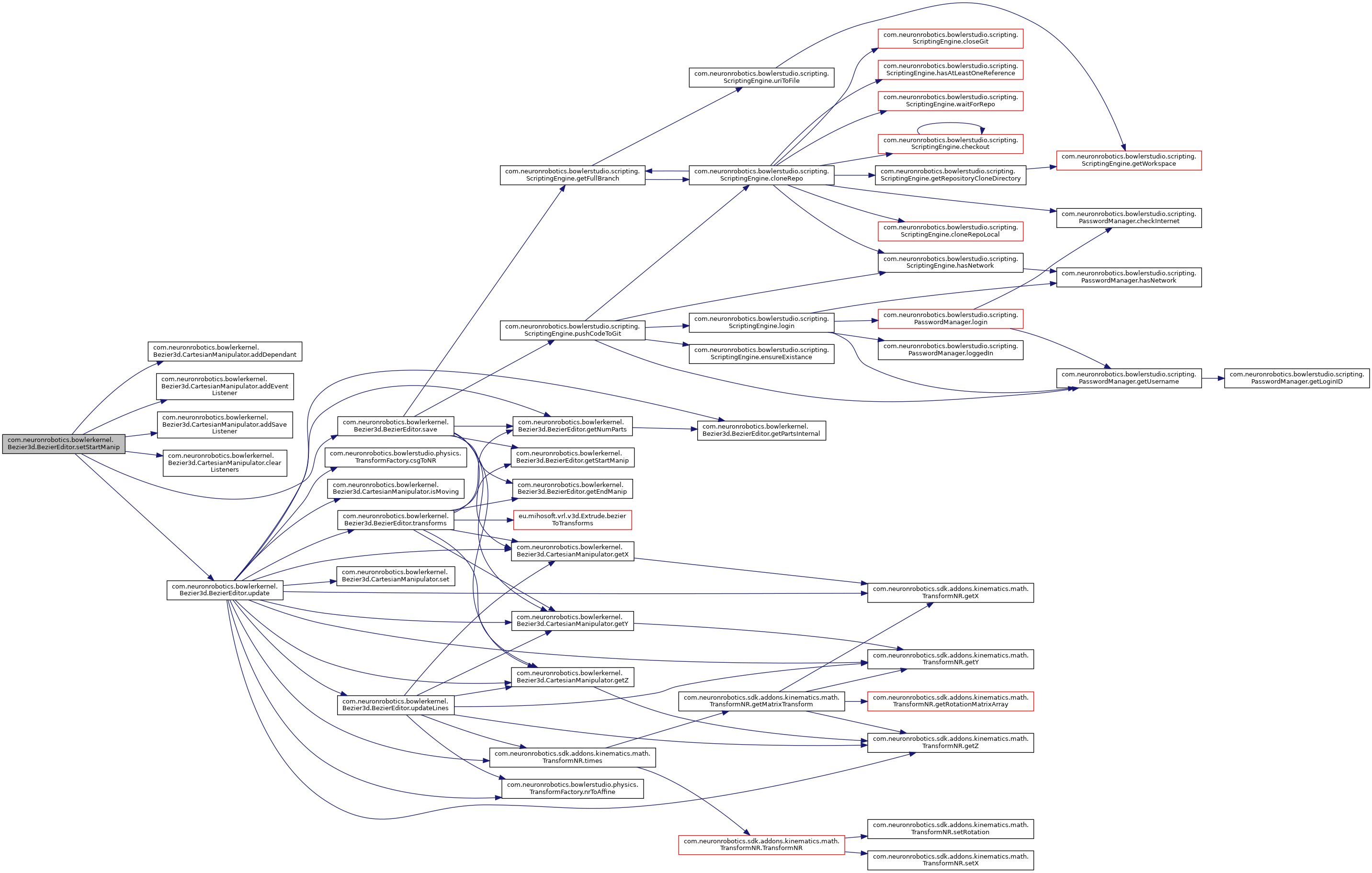
◆ setStartManip()
| void com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStartManip | ( | CartesianManipulator | start | ) |
Definition at line 376 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.addDependant(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.addEventListener(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.addSaveListener(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.clearListeners(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.cp1Line, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.cp1LinePose, com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationMatrix, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.start, and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.addBezierToTheEnd(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor().
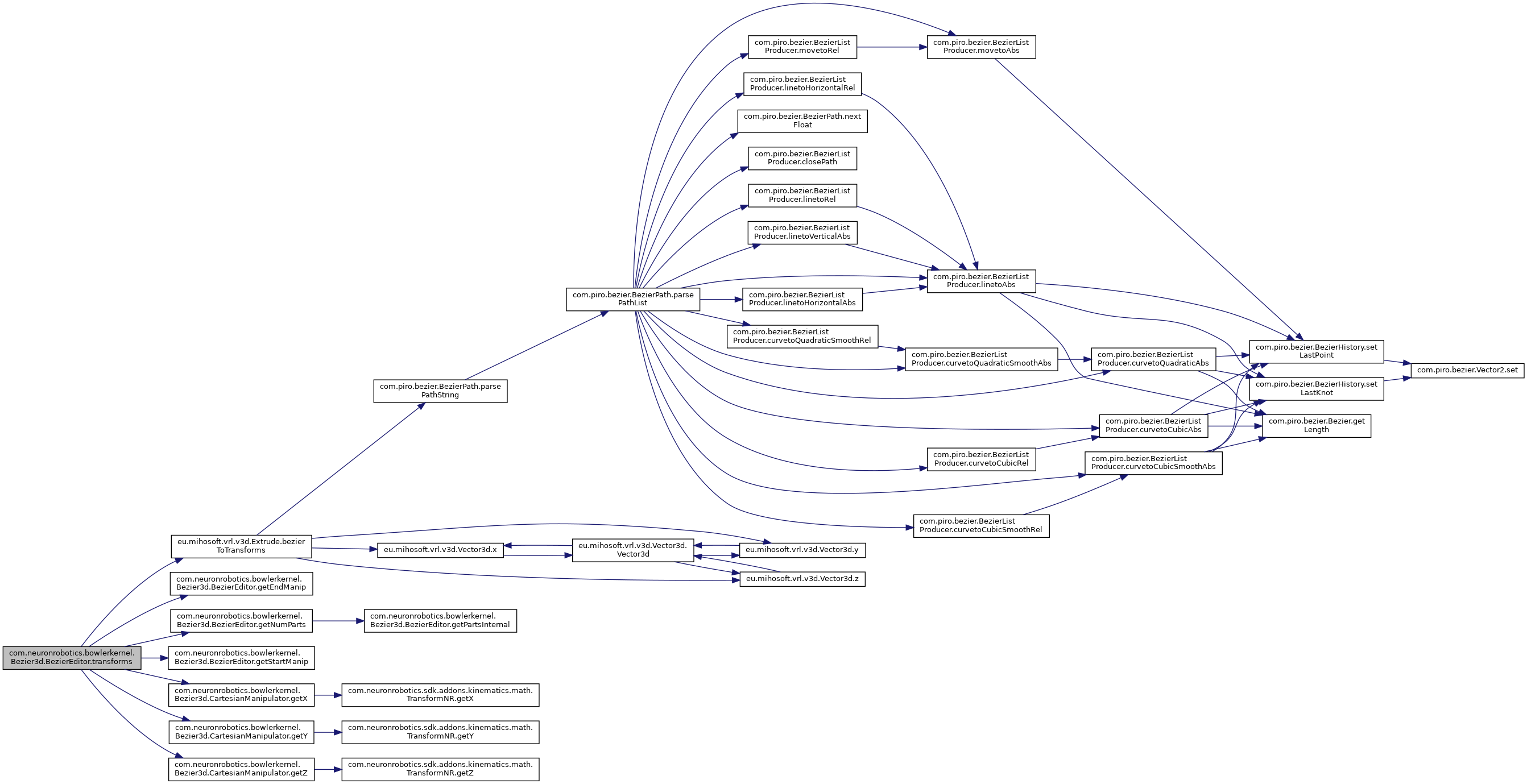
◆ transforms()
| ArrayList<Transform> com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.transforms | ( | ) |
Definition at line 289 of file BezierEditor.java.
References eu.mihosoft.vrl.v3d.Extrude.bezierToTransforms(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getEndManip(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getNumParts(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getStartManip(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getX(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getY(), and com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getZ().
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
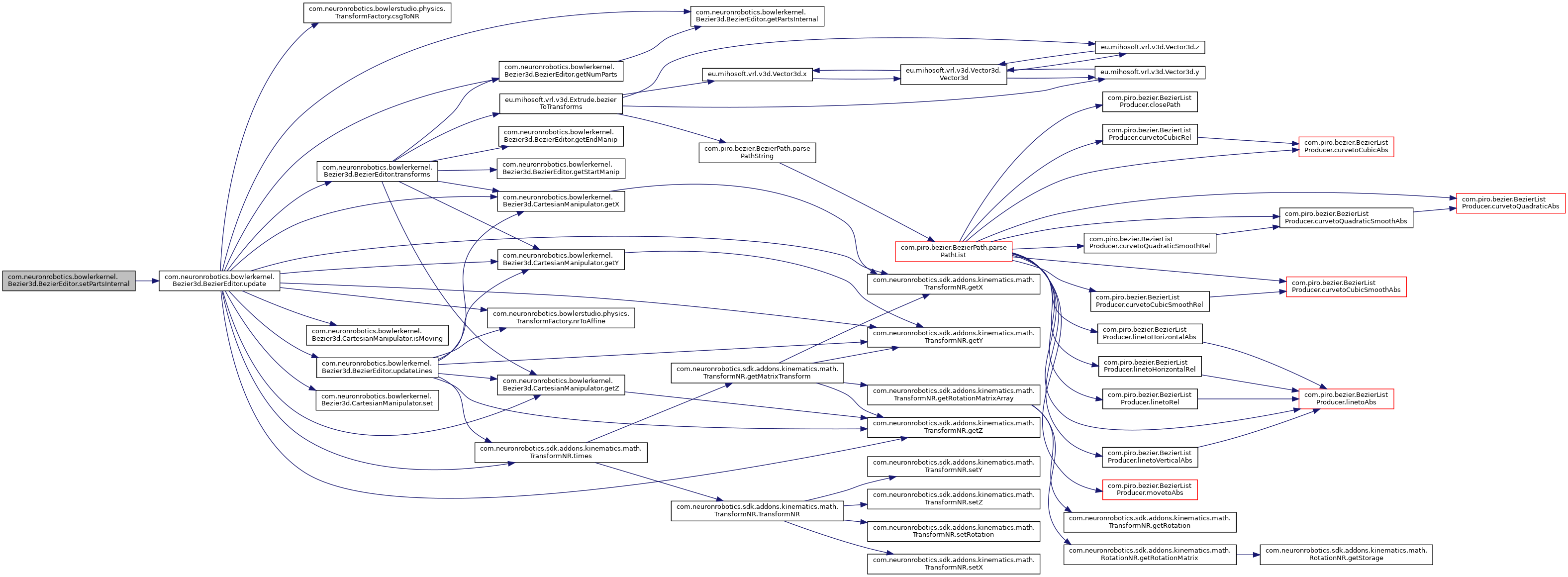
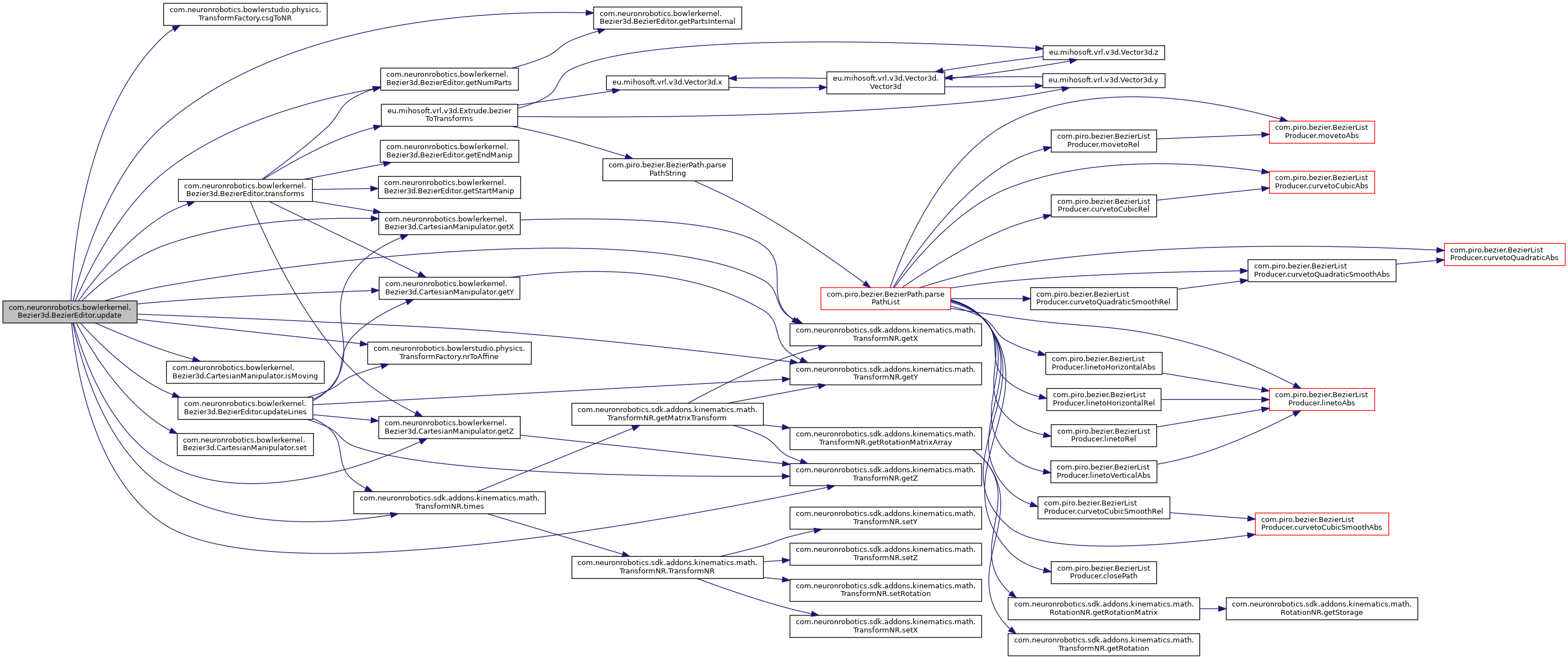
◆ update()
| void com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update | ( | ) |
Definition at line 186 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.cp1Line, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.cp1LinePose, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.cp2Line, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.cp2LinePose, com.neuronrobotics.bowlerstudio.physics.TransformFactory.csgToNR(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.endManip, com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getNumParts(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getPartsInternal(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getX(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getX(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getY(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getY(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getZ(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getZ(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.isMoving(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.nextBez, com.neuronrobotics.bowlerstudio.physics.TransformFactory.nrToAffine(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.set(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.start, com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.times(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.transforms(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.updateLines().
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setPartsInternal(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStartManip().
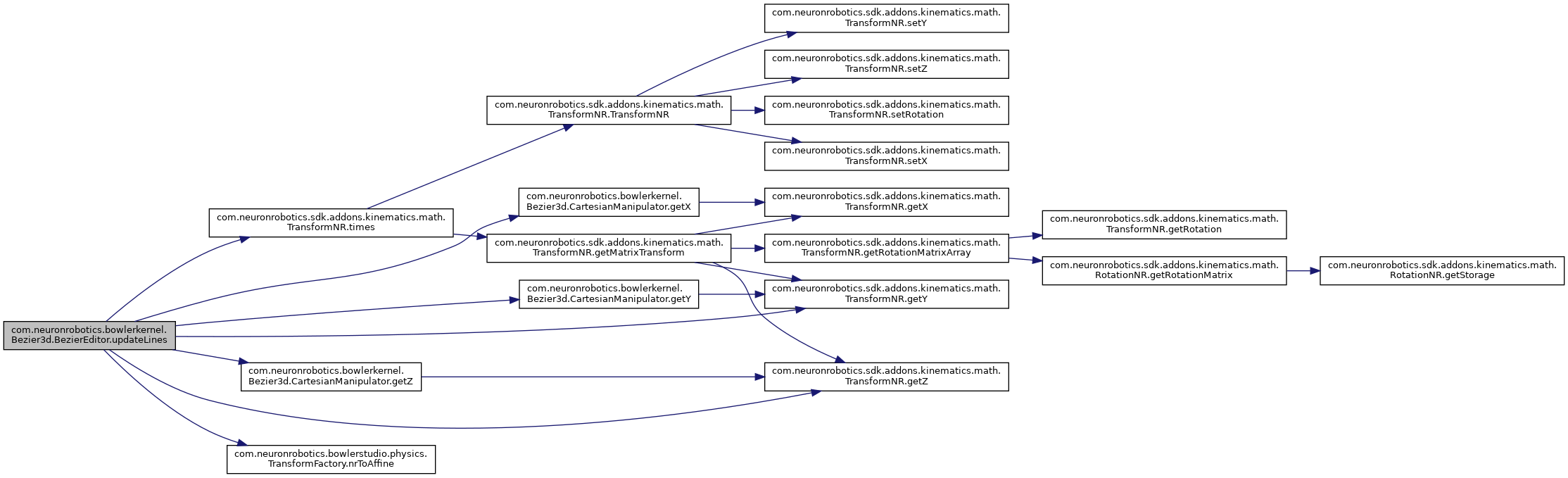
◆ updateLines()
|
private |
Definition at line 223 of file BezierEditor.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getX(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getY(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getY(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getZ(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getZ(), com.neuronrobotics.bowlerstudio.physics.TransformFactory.nrToAffine(), and com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.times().
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
Member Data Documentation
◆ cp1Line
|
private |
Definition at line 64 of file BezierEditor.java.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.get(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStartManip(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
◆ cp1LinePose
|
private |
Definition at line 66 of file BezierEditor.java.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStartManip(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
◆ cp2Line
|
private |
Definition at line 65 of file BezierEditor.java.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.get(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
◆ cp2LinePose
|
private |
Definition at line 67 of file BezierEditor.java.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
◆ endManip
|
private |
Definition at line 54 of file BezierEditor.java.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.addBezierToTheEnd(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getEndManip(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setEnd(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
◆ gitfile
|
private |
Definition at line 61 of file BezierEditor.java.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save().
◆ nextBez
|
private |
◆ partsInternal
|
private |
Definition at line 51 of file BezierEditor.java.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getPartsInternal(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setPartsInternal().
◆ saving
|
private |
Definition at line 62 of file BezierEditor.java.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save().
◆ start
|
private |
Definition at line 57 of file BezierEditor.java.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getStartManip(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStartManip(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
◆ url
|
private |
Definition at line 60 of file BezierEditor.java.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save().
The documentation for this class was generated from the following file:
- src/main/java/com/neuronrobotics/bowlerkernel/Bezier3d/BezierEditor.java