Public Member Functions | |
| CartesianManipulator (TransformNR globalPose) | |
| void | addEventListener (Runnable r) |
| void | addSaveListener (Runnable r) |
| List< CSG > | get () |
| double | getX () |
| double | getY () |
| double | getZ () |
| void | addDependant (CartesianManipulator r) |
| boolean | isMoving () |
| void | clearListeners () |
| void | set (double newX, double newY, double newZ) |
Public Attributes | |
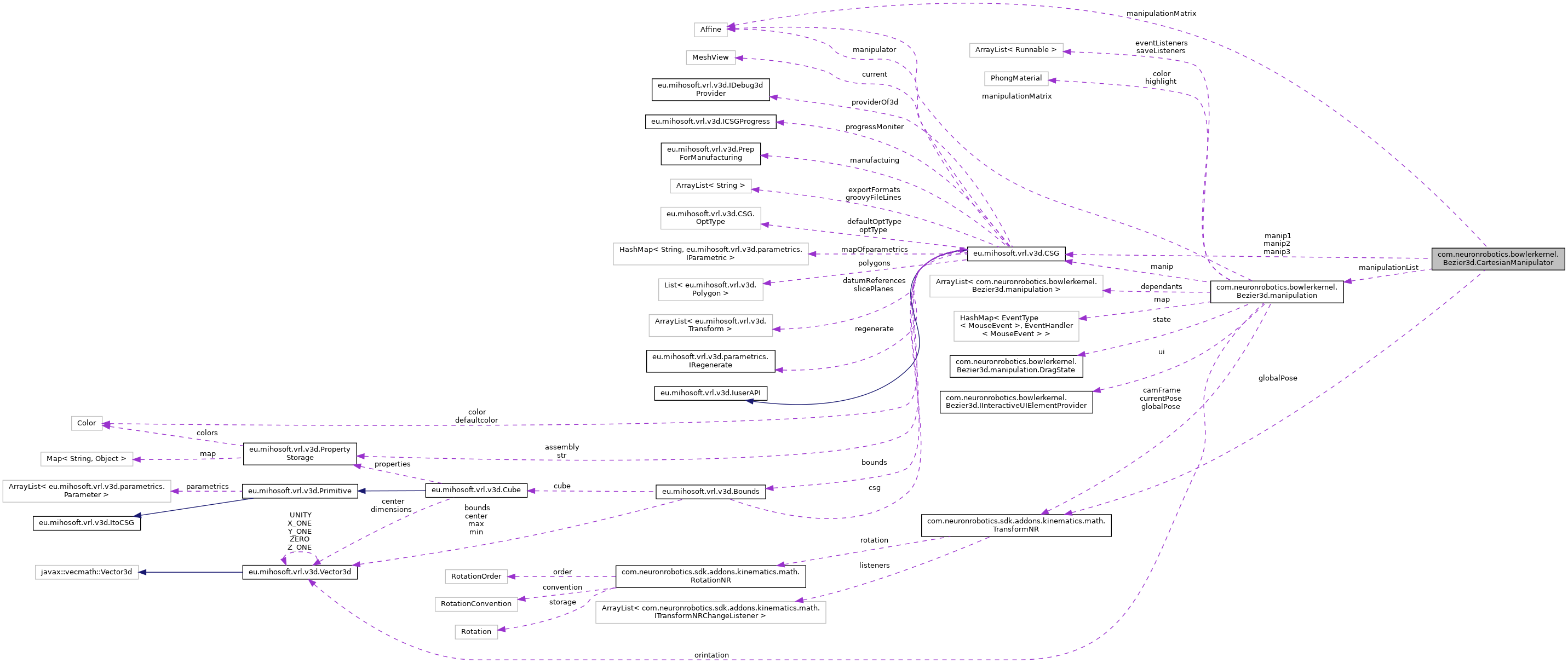
| Affine | manipulationMatrix = new Affine() |
Private Attributes | |
| manipulation[] | manipulationList = new manipulation[3] |
Detailed Description
Definition at line 15 of file CartesianManipulator.java.
Constructor & Destructor Documentation
◆ CartesianManipulator()
| com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.CartesianManipulator | ( | TransformNR | globalPose | ) |
Definition at line 23 of file CartesianManipulator.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationList, com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationMatrix, and eu.mihosoft.vrl.v3d.CSG.setMfg().

Member Function Documentation
◆ addDependant()
| void com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.addDependant | ( | CartesianManipulator | r | ) |
Definition at line 59 of file CartesianManipulator.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationList.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStartManip().
◆ addEventListener()
| void com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.addEventListener | ( | Runnable | r | ) |
Definition at line 33 of file CartesianManipulator.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationList.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStartManip().
◆ addSaveListener()
| void com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.addSaveListener | ( | Runnable | r | ) |
Definition at line 38 of file CartesianManipulator.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationList.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStartManip().
◆ clearListeners()
| void com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.clearListeners | ( | ) |
Definition at line 70 of file CartesianManipulator.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationList.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStartManip().
◆ get()
| List<CSG> com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.get | ( | ) |
Definition at line 43 of file CartesianManipulator.java.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.getCSG().
◆ getX()
| double com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getX | ( | ) |
Definition at line 47 of file CartesianManipulator.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.manipulation.currentPose, com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getX(), and com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationList.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.transforms(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.updateLines().

◆ getY()
| double com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getY | ( | ) |
Definition at line 51 of file CartesianManipulator.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.manipulation.currentPose, com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getY(), and com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationList.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.transforms(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.updateLines().

◆ getZ()
| double com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getZ | ( | ) |
Definition at line 55 of file CartesianManipulator.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.manipulation.currentPose, com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getZ(), and com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationList.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.save(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.transforms(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.updateLines().

◆ isMoving()
| boolean com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.isMoving | ( | ) |
Definition at line 63 of file CartesianManipulator.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationList.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
◆ set()
| void com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.set | ( | double | newX, |
| double | newY, | ||
| double | newZ | ||
| ) |
Definition at line 76 of file CartesianManipulator.java.
References com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationList.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setCP1(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setCP2(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setEnd(), com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStart(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.update().
Member Data Documentation
◆ manipulationList
|
private |
Definition at line 20 of file CartesianManipulator.java.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.addDependant(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.addEventListener(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.addSaveListener(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.CartesianManipulator(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.clearListeners(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getX(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getY(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.getZ(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.isMoving(), and com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.set().
◆ manipulationMatrix
| Affine com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.manipulationMatrix = new Affine() |
Definition at line 16 of file CartesianManipulator.java.
Referenced by com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.BezierEditor(), com.neuronrobotics.bowlerkernel.Bezier3d.CartesianManipulator.CartesianManipulator(), and com.neuronrobotics.bowlerkernel.Bezier3d.BezierEditor.setStartManip().
The documentation for this class was generated from the following file:
- src/main/java/com/neuronrobotics/bowlerkernel/Bezier3d/CartesianManipulator.java