Classes | |
| class | Message |
Public Member Functions | |
| String | getImportance (int importance) |
| String | getImportanceColor (int importance) |
Static Public Member Functions | |
| static void | error (String message) |
| static void | warning (String message) |
| static void | info (String message) |
| static void | log (String message) |
| static void | debug (String message) |
| static void | add (String message) |
| static void | enableSystemPrint (boolean systemprint) |
| static void | enableDebugPrint () |
| static void | enableDebugPrint (boolean flag) |
| static void | enableInfoPrint () |
| static void | enableWarningPrint () |
| static void | enableErrorPrint () |
| static void | setMinimumPrintLevel (int level) |
| static int | getMinimumPrintLevel () |
| static Log | instance () |
| static PrintStream | getErrStream () |
| static void | setErrStream (PrintStream newerrStream) |
| static PrintStream | getOutStream () |
| static void | setOutStream (PrintStream newoutStream) |
| static boolean | isUseColoredPrints () |
| static void | setUseColoredPrints (boolean useColoredPrints) |
| static boolean | isPrinting () |
| static void | error (Throwable ex) |
Static Public Attributes | |
| static final int | LOG =-1 |
| static final int | INFO = 0 |
| static final int | DEBUG = 1 |
| static final int | WARNING = 2 |
| static final int | ERROR = 3 |
Private Member Functions | |
| Log () | |
| void | add (String message, int importance) |
| String | getColorNormalizationCode () |
Private Attributes | |
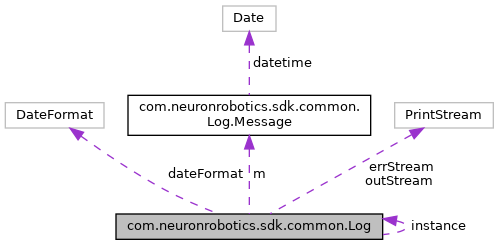
| Message | m |
| DateFormat | dateFormat = new SimpleDateFormat("yyyy/MM/dd HH:mm:ss:SS") |
| int | minprintlevel = WARNING |
| boolean | systemprint = false |
| boolean | debugprint = false |
| boolean | useColoredPrints =false |
Static Private Attributes | |
| static Log | instance |
| static PrintStream | outStream = System.out |
| static PrintStream | errStream = System.err |
Detailed Description
Constructor & Destructor Documentation
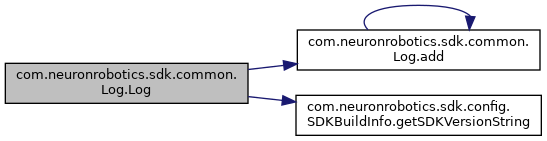
◆ Log()
|
private |
Instantiates a new log.
Definition at line 82 of file Log.java.
References com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.config.SDKBuildInfo.getSDKVersionString(), and com.neuronrobotics.sdk.common.Log.INFO.
Referenced by com.neuronrobotics.sdk.common.Log.instance().
Member Function Documentation
◆ add() [1/2]
|
static |
Add a line to the log.
- Parameters
-
message The line to add
Definition at line 137 of file Log.java.
References com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.common.Log.instance, and com.neuronrobotics.sdk.common.Log.LOG.
Referenced by com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.common.Log.debug(), com.neuronrobotics.sdk.common.Log.error(), com.neuronrobotics.sdk.common.Log.info(), com.neuronrobotics.sdk.common.Log.Log(), com.neuronrobotics.sdk.common.Log.log(), and com.neuronrobotics.sdk.common.Log.warning().
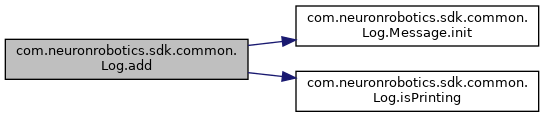
◆ add() [2/2]
|
private |
Add a string to the log with a specific importance.
- Parameters
-
message the message to add importance the importance to log it as.
Definition at line 147 of file Log.java.
References com.neuronrobotics.sdk.common.Log.debugprint, com.neuronrobotics.sdk.common.Log.errStream, com.neuronrobotics.sdk.common.Log.Message.init(), com.neuronrobotics.sdk.common.Log.isPrinting(), com.neuronrobotics.sdk.common.Log.m, com.neuronrobotics.sdk.common.Log.minprintlevel, com.neuronrobotics.sdk.common.Log.outStream, and com.neuronrobotics.sdk.common.Log.systemprint.
◆ debug()
|
static |
Log a debug message.
- Parameters
-
message The debug message to log
Definition at line 128 of file Log.java.
References com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.common.Log.DEBUG, and com.neuronrobotics.sdk.common.Log.instance.
Referenced by com.neuronrobotics.replicator.driver.interpreter.GCodeInterpreter.addDefaultHandlers(), com.neuronrobotics.replicator.driver.interpreter.GCodeInterpreter.executeLine(), com.neuronrobotics.sdk.namespace.bcs.pid.LegacyPidNamespaceImp.GetAllPIDPosition(), com.neuronrobotics.bowlerstudio.scripting.ScriptingEngine.getCurrentGist(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.getNamespaces(), com.neuronrobotics.sdk.common.BowlerAbstractDevice.getRevisions(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.getRpcList(), com.neuronrobotics.bowlerstudio.scripting.ScriptingEngine.getUserIdOfGist(), com.neuronrobotics.bowlerstudio.scripting.JythonHelper.inlineScriptRun(), com.neuronrobotics.sdk.common.device.server.BowlerAbstractServer.onSyncReceive(), com.neuronrobotics.replicator.driver.interpreter.GCodeInterpreter.processSingleGCODELine(), com.neuronrobotics.sdk.common.device.server.BowlerAbstractServer.pushAsyncPacket(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.runHeartBeat(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.runHome(), com.neuronrobotics.sdk.dyio.DyIOChannel.setMode(), com.neuronrobotics.sdk.namespace.bcs.pid.LegacyPidNamespaceImp.SetPDVelocity(), com.neuronrobotics.sdk.dyio.peripherals.PPMReaderChannel.updateValues(), and com.neuronrobotics.bowlerstudio.scripting.ScriptingEngine.urlToGist().

◆ enableDebugPrint() [1/2]
|
static |
Enable printing of debug output.
Definition at line 187 of file Log.java.
References com.neuronrobotics.sdk.common.Log.DEBUG, com.neuronrobotics.sdk.common.Log.enableSystemPrint(), and com.neuronrobotics.sdk.common.Log.setMinimumPrintLevel().
◆ enableDebugPrint() [2/2]
|
static |
Enable printing of debug output.
- Parameters
-
flag the flag
Definition at line 198 of file Log.java.
References com.neuronrobotics.sdk.common.Log.DEBUG, com.neuronrobotics.sdk.common.Log.enableSystemPrint(), and com.neuronrobotics.sdk.common.Log.setMinimumPrintLevel().
◆ enableErrorPrint()
|
static |
Enable printing of debug output.
Definition at line 225 of file Log.java.
References com.neuronrobotics.sdk.common.Log.enableSystemPrint(), com.neuronrobotics.sdk.common.Log.ERROR, and com.neuronrobotics.sdk.common.Log.setMinimumPrintLevel().
Referenced by com.neuronrobotics.sdk.common.BowlerAbstractConnection.QueueManager.run().
◆ enableInfoPrint()
|
static |
Enable printing of debug output.
Definition at line 207 of file Log.java.
References com.neuronrobotics.sdk.common.Log.enableSystemPrint(), com.neuronrobotics.sdk.common.Log.INFO, and com.neuronrobotics.sdk.common.Log.setMinimumPrintLevel().
Referenced by com.neuronrobotics.sdk.namespace.bcs.pid.PidDeviceServer.main().
◆ enableSystemPrint()
|
static |
Enable printing of output to standard out.
- Parameters
-
systemprint the systemprint
Definition at line 179 of file Log.java.
References com.neuronrobotics.sdk.common.Log.instance, and com.neuronrobotics.sdk.common.Log.systemprint.
Referenced by com.neuronrobotics.sdk.common.Log.enableDebugPrint(), com.neuronrobotics.sdk.common.Log.enableErrorPrint(), com.neuronrobotics.sdk.common.Log.enableInfoPrint(), and com.neuronrobotics.sdk.common.Log.enableWarningPrint().
◆ enableWarningPrint()
|
static |
Enable printing of debug output.
Definition at line 216 of file Log.java.
References com.neuronrobotics.sdk.common.Log.enableSystemPrint(), com.neuronrobotics.sdk.common.Log.setMinimumPrintLevel(), and com.neuronrobotics.sdk.common.Log.WARNING.
◆ error() [1/2]
|
static |
Log an error message.
- Parameters
-
message the message to log as an error
Definition at line 92 of file Log.java.
References com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.common.Log.ERROR, and com.neuronrobotics.sdk.common.Log.instance.
Referenced by com.neuronrobotics.sdk.common.device.server.BowlerAbstractServer.addBowlerDeviceServerNamespace(), com.neuronrobotics.replicator.driver.interpreter.GCodeInterpreter.addDefaultHandlers(), com.neuronrobotics.sdk.common.BowlerRuntimeException.BowlerRuntimeException(), com.neuronrobotics.sdk.network.BowlerTCPClient.BowlerTCPClient(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.checkVector(), com.neuronrobotics.sdk.javaxusb.UsbCDCSerialConnection.connect(), com.neuronrobotics.sdk.serial.SerialConnection.connect(), com.neuronrobotics.sdk.wireless.bluetooth.BluetoothSerialConnection.connect(), com.neuronrobotics.sdk.addons.kinematics.MobileBase.connectDevice(), com.neuronrobotics.sdk.addons.irobot.Create.driveStraightBlocking(), com.neuronrobotics.sdk.common.Log.error(), com.neuronrobotics.sdk.dyio.DyIOChannel.fireModeChangeEvent(), com.neuronrobotics.sdk.namespace.bcs.pid.AbstractPidNamespaceImp.firePIDEvent(), com.neuronrobotics.sdk.common.ByteList.get(), com.neuronrobotics.bowlerstudio.vitamins.Vitamins.get(), com.neuronrobotics.sdk.dyio.DyIO.getAllChannelModes(), com.neuronrobotics.sdk.dyio.DyIO.getAvailibleChannelModes(), com.neuronrobotics.sdk.common.RpcEncapsulation.getCommand(), com.neuronrobotics.sdk.common.BowlerDocumentationFactory.getDocumentationURL(), com.neuronrobotics.sdk.bowlercam.device.BowlerCamDevice.getHighSpeedImage(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.getNamespaces(), com.neuronrobotics.sdk.common.BowlerAbstractDevice.getRevisions(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.getRpcList(), com.neuronrobotics.sdk.common.ByteList.getUnsigned(), com.neuronrobotics.sdk.dyio.DyIOChannel.getValue(), com.neuronrobotics.sdk.network.UDPBowlerConnection.init(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.LinkConfiguration(), com.neuronrobotics.sdk.ui.ConnectionDialog.loadDefaultConnections(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.loadPacketFromPhy(), com.neuronrobotics.sdk.dyio.DyIO.onAsyncResponse(), com.neuronrobotics.sdk.addons.irobot.Create.onChannelEvent(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.onLinkPositionUpdate(), com.neuronrobotics.sdk.common.device.server.BowlerAbstractServer.onSyncReceive(), com.neuronrobotics.sdk.common.BowlerDatagram.onTimeout(), com.neuronrobotics.sdk.common.BowlerDatagram.parse(), com.neuronrobotics.sdk.common.RpcEncapsulation.parseResponse(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.ping(), com.neuronrobotics.sdk.dyio.DyIO.powerEvent(), com.neuronrobotics.sdk.common.device.server.BowlerAbstractServer.processLocal(), com.neuronrobotics.sdk.common.device.server.BowlerAbstractServer.pushAsyncPacket(), com.neuronrobotics.sdk.network.BowlerTCPClient.reconnect(), com.neuronrobotics.sdk.common.device.server.BowlerAbstractServer.removeServer(), com.neuronrobotics.sdk.dyio.DyIO.resync(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNR.RotationNR(), com.neuronrobotics.sdk.bowlercam.device.BowlerCamDevice.ImageReader.run(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.QueueManager.run(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.runLine(), com.neuronrobotics.sdk.pid.GenericPIDDevice.runOutputHysteresisCalibration(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.QueueManager.runPacketUpdate(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.send(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.sendAsync(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.sendSynchronusly(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDevice(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setGlobalToFiducialTransform(), com.neuronrobotics.sdk.dyio.DyIOChannel.setMode(), com.neuronrobotics.sdk.namespace.bcs.pid.LegacyPidNamespaceImp.SetPDVelocity(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setRobotToFiducialTransform(), com.neuronrobotics.sdk.addons.irobot.Create.turnBlocking(), com.neuronrobotics.sdk.dyio.DyIOChannel.update(), com.neuronrobotics.sdk.commands.bcs.io.GetChannelModeCommand.validate(), com.neuronrobotics.sdk.dyio.DyIO.validateChannel(), and com.neuronrobotics.sdk.common.BowlerAbstractConnection.write().

◆ error() [2/2]
|
static |
Definition at line 441 of file Log.java.
References com.neuronrobotics.sdk.common.Log.error().

◆ getColorNormalizationCode()
|
private |
Gets the color normalization code.
- Returns
- the color normalization code
Definition at line 407 of file Log.java.
References com.neuronrobotics.sdk.common.Log.isUseColoredPrints().
Referenced by com.neuronrobotics.sdk.common.Log.Message.toString().

◆ getErrStream()
|
static |
get the current error PrintStream.
- Returns
- the current Error PrintStream
Definition at line 313 of file Log.java.
References com.neuronrobotics.sdk.common.Log.errStream.
◆ getImportance()
| String com.neuronrobotics.sdk.common.Log.getImportance | ( | int | importance | ) |
Get a string describing the given importance level.
- Parameters
-
importance The given importance level.
- Returns
- the importance
Definition at line 268 of file Log.java.
References com.neuronrobotics.sdk.common.Log.DEBUG, com.neuronrobotics.sdk.common.Log.ERROR, com.neuronrobotics.sdk.common.Log.INFO, com.neuronrobotics.sdk.common.Log.LOG, and com.neuronrobotics.sdk.common.Log.WARNING.
Referenced by com.neuronrobotics.sdk.common.Log.Message.toString().
◆ getImportanceColor()
| String com.neuronrobotics.sdk.common.Log.getImportanceColor | ( | int | importance | ) |
Get a string describing the given importance level.
- Parameters
-
importance The given importance level.
- Returns
- the importance
Definition at line 289 of file Log.java.
References com.neuronrobotics.sdk.common.Log.DEBUG, com.neuronrobotics.sdk.common.Log.ERROR, com.neuronrobotics.sdk.common.Log.INFO, com.neuronrobotics.sdk.common.Log.isUseColoredPrints(), com.neuronrobotics.sdk.common.Log.LOG, and com.neuronrobotics.sdk.common.Log.WARNING.
Referenced by com.neuronrobotics.sdk.common.Log.Message.toString().

◆ getMinimumPrintLevel()
|
static |
Set the minimum level of importance to dsplay. Messages below this wont be displayed.
- Returns
- the minimum print level
Definition at line 246 of file Log.java.
References com.neuronrobotics.sdk.common.Log.instance, and com.neuronrobotics.sdk.common.Log.minprintlevel.
Referenced by com.neuronrobotics.sdk.common.BowlerAbstractConnection.QueueManager.run().
◆ getOutStream()
|
static |
Get the current output PrintStream.
- Returns
- The current output PrintStream
Definition at line 331 of file Log.java.
References com.neuronrobotics.sdk.common.Log.outStream.
◆ info()
|
static |
Log a info message.
- Parameters
-
message the message to log as a piece of information.
Definition at line 110 of file Log.java.
References com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.common.Log.INFO, and com.neuronrobotics.sdk.common.Log.instance.
Referenced by com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.AbstractKinematicsNR(), com.neuronrobotics.sdk.common.ByteList.add(), com.neuronrobotics.sdk.wireless.bluetooth.BluetoothSerialConnection.BluetoothSerialConnection(), com.neuronrobotics.sdk.common.device.server.BowlerDeviceReServerNamespace.BowlerDeviceReServerNamespace(), com.neuronrobotics.sdk.network.BowlerTCPClient.BowlerTCPClient(), com.neuronrobotics.sdk.dyio.DyIO.checkFirmwareRev(), com.neuronrobotics.sdk.network.UDPBowlerConnection.connect(), com.neuronrobotics.sdk.wireless.bluetooth.BlueCoveManager.connect(), com.neuronrobotics.sdk.ui.ConnectionDialog.ConnectionDialog(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.disconnect(), com.neuronrobotics.sdk.common.BowlerAbstractDevice.disconnect(), com.neuronrobotics.sdk.wireless.bluetooth.BlueCoveManager.disconnect(), com.neuronrobotics.sdk.addons.irobot.Create.driveStraightBlocking(), com.neuronrobotics.sdk.wireless.bluetooth.BlueCoveManager.find(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.fireAsyncOnResponse(), com.neuronrobotics.sdk.dyio.DyIOChannel.fireChannelEvent(), com.neuronrobotics.sdk.dyio.DyIOChannel.fireModeChangeEvent(), com.neuronrobotics.sdk.dyio.DyIOChannel.flush(), com.neuronrobotics.sdk.namespace.bcs.pid.AbstractPidNamespaceImp.flushPIDChannels(), com.neuronrobotics.sdk.pid.VirtualGenericPIDDevice.flushPIDChannels(), com.neuronrobotics.sdk.network.UDPBowlerConnection.getAllAddresses(), com.neuronrobotics.sdk.dyio.DyIO.getAllChannelValues(), com.neuronrobotics.sdk.dyio.DyIO.getAvailibleChannelModes(), com.neuronrobotics.sdk.ui.ConnectionDialog.getBowlerDevice(), com.neuronrobotics.sdk.ui.BluetoothConnectionPanel.getConnection(), com.neuronrobotics.sdk.ui.SerialConnectionPanel.getConnection(), com.neuronrobotics.sdk.ui.TCPConnectionPanel.getConnection(), com.neuronrobotics.sdk.ui.UsbConnectionPanel.getConnection(), com.neuronrobotics.sdk.bowlercam.device.BowlerCamDevice.getHighSpeedImage(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.getNamespaces(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.getRpcList(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.homeLink(), com.neuronrobotics.sdk.addons.irobot.Create.InitCreateBlocking(), com.neuronrobotics.sdk.network.BowlerUDPServer.loadPacketFromPhy(), com.neuronrobotics.sdk.network.UDPBowlerConnection.loadPacketFromPhy(), com.neuronrobotics.sdk.common.device.server.BowlerAbstractDeviceServer.onAllResponse(), com.neuronrobotics.sdk.bowlercam.device.BowlerCamDevice.onAsyncResponse(), com.neuronrobotics.sdk.dyio.DyIO.onAsyncResponse(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.onDataReceived(), com.neuronrobotics.sdk.namespace.bcs.pid.PidDeviceServer.onPIDEvent(), com.neuronrobotics.sdk.common.device.server.BowlerAbstractServer.onSyncReceive(), com.neuronrobotics.sdk.namespace.bcs.pid.PidDeviceServer.PidDeviceServer(), com.neuronrobotics.sdk.namespace.bcs.pid.PidDeviceServerNamespace.PidDeviceServerNamespace(), com.neuronrobotics.sdk.common.device.server.BowlerAbstractServer.pushAsyncPacket(), com.neuronrobotics.sdk.wireless.bluetooth.BluetoothSerialConnection.recon(), com.neuronrobotics.sdk.ui.BluetoothConnectionPanel.refresh(), com.neuronrobotics.sdk.dyio.DyIO.resync(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.QueueManager.run(), com.neuronrobotics.sdk.ui.BluetoothConnectionPanel.BluetoothSearchProcess.run(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.runHome(), com.neuronrobotics.sdk.addons.kinematics.gcodebridge.GcodeDevice.runLine(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.QueueManager.runPacketUpdate(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.sendSynchronusly(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles(), com.neuronrobotics.sdk.pid.PIDChannel.setCachedTargetValue(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.setConnected(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDesiredJointAxisValue(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDesiredTaskSpaceTransform(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setDevice(), com.neuronrobotics.sdk.dyio.DyIOChannel.setMode(), com.neuronrobotics.sdk.addons.kinematics.LinkConfiguration.setName(), com.neuronrobotics.sdk.namespace.bcs.pid.LegacyPidNamespaceImp.SetPIDSetPoint(), com.neuronrobotics.sdk.addons.kinematics.AbstractKinematicsNR.setRobotToFiducialTransform(), com.neuronrobotics.sdk.addons.kinematics.AbstractLink.setTargetValue(), com.neuronrobotics.sdk.network.BowlerTCPClient.setTCPSocket(), com.neuronrobotics.sdk.dyio.peripherals.CounterOutputChannel.setValue(), com.neuronrobotics.sdk.addons.irobot.Create.turnBlocking(), com.neuronrobotics.sdk.addons.irobot.CreateArm.updateCartesian(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.waitForConnectioToBeReady(), and com.neuronrobotics.sdk.network.BowlerUDPServer.write().

◆ instance()
|
static |
Get the current log (singleton) instance.
- Returns
- The log instance.
Definition at line 255 of file Log.java.
References com.neuronrobotics.sdk.common.Log.instance, and com.neuronrobotics.sdk.common.Log.Log().

◆ isPrinting()
|
static |
Checks if is printing.
- Returns
- true, if is printing
Definition at line 436 of file Log.java.
References com.neuronrobotics.sdk.common.Log.instance, and com.neuronrobotics.sdk.common.Log.systemprint.
Referenced by com.neuronrobotics.sdk.common.Log.add(), and com.neuronrobotics.sdk.common.BowlerDatagram.toString().
◆ isUseColoredPrints()
|
static |
Checks if is use colored prints.
- Returns
- true, if is use colored prints
Definition at line 418 of file Log.java.
References com.neuronrobotics.sdk.common.Log.instance, and com.neuronrobotics.sdk.common.Log.useColoredPrints.
Referenced by com.neuronrobotics.sdk.common.Log.getColorNormalizationCode(), and com.neuronrobotics.sdk.common.Log.getImportanceColor().
◆ log()
|
static |
Log a string.
- Parameters
-
message The string to log.
Definition at line 119 of file Log.java.
References com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.common.Log.instance, and com.neuronrobotics.sdk.common.Log.LOG.

◆ setErrStream()
|
static |
set the current error PrintStream.
- Parameters
-
newerrStream the new err stream
Definition at line 322 of file Log.java.
References com.neuronrobotics.sdk.common.Log.errStream.
◆ setMinimumPrintLevel()
|
static |
Set the minimum level of importance to dsplay. Messages below this wont be displayed.
- Parameters
-
level The minimu importance level
Definition at line 236 of file Log.java.
References com.neuronrobotics.sdk.common.Log.instance, and com.neuronrobotics.sdk.common.Log.minprintlevel.
Referenced by com.neuronrobotics.sdk.common.Log.enableDebugPrint(), com.neuronrobotics.sdk.common.Log.enableErrorPrint(), com.neuronrobotics.sdk.common.Log.enableInfoPrint(), com.neuronrobotics.sdk.common.Log.enableWarningPrint(), and com.neuronrobotics.sdk.common.BowlerAbstractConnection.QueueManager.run().
◆ setOutStream()
|
static |
Set the current output PrintStream.
- Parameters
-
newoutStream the new out stream
Definition at line 340 of file Log.java.
References com.neuronrobotics.sdk.common.Log.outStream.
◆ setUseColoredPrints()
|
static |
Sets the use colored prints.
- Parameters
-
useColoredPrints the new use colored prints
Definition at line 427 of file Log.java.
References com.neuronrobotics.sdk.common.Log.instance, and com.neuronrobotics.sdk.common.Log.useColoredPrints.
◆ warning()
|
static |
Log an warning message.
- Parameters
-
message the message to log as a warning
Definition at line 101 of file Log.java.
References com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.common.Log.instance, and com.neuronrobotics.sdk.common.Log.WARNING.
Referenced by com.neuronrobotics.sdk.common.DeviceManager.addConnectionBAD(), com.neuronrobotics.sdk.common.device.server.BowlerAbstractServer.addServer(), com.neuronrobotics.sdk.network.BowlerTCPServer.connect(), com.neuronrobotics.sdk.addons.gamepad.BowlerJInputDevice.connectDeviceImp(), com.neuronrobotics.sdk.common.ConnectionUnavailableException.ConnectionUnavailableException(), com.neuronrobotics.sdk.network.BowlerTCPClient.disconnect(), com.neuronrobotics.sdk.network.BowlerTCPServer.disconnect(), com.neuronrobotics.sdk.serial.SerialConnection.disconnect(), com.neuronrobotics.sdk.ui.BluetoothConnectionPanel.getConnection(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.getNamespaces(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotAngle(), com.neuronrobotics.sdk.common.MalformattedDatagram.MalformattedDatagram(), com.neuronrobotics.sdk.common.MissingNativeLibraryException.MissingNativeLibraryException(), com.neuronrobotics.sdk.dyio.DyIO.onAsyncResponse(), com.neuronrobotics.sdk.network.BowlerTCPClient.reconnect(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.sendSynchronusly(), com.neuronrobotics.sdk.common.BowlerAbstractConnection.setSynchronusPacketTimeoutTime(), com.neuronrobotics.sdk.common.BowlerDatagram.setUseBowlerV4(), and com.neuronrobotics.sdk.common.device.server.BowlerAbstractServer.startNetworkServer().

Member Data Documentation
◆ dateFormat
|
private |
The date format.
Definition at line 58 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.Message.toString().
◆ DEBUG
|
static |
The Constant DEBUG.
Definition at line 42 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.debug(), com.neuronrobotics.sdk.common.Log.enableDebugPrint(), com.neuronrobotics.sdk.common.Log.getImportance(), and com.neuronrobotics.sdk.common.Log.getImportanceColor().
◆ debugprint
|
private |
The debugprint.
Definition at line 67 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.add().
◆ ERROR
|
static |
The Constant ERROR.
Definition at line 48 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.enableErrorPrint(), com.neuronrobotics.sdk.common.Log.error(), com.neuronrobotics.sdk.common.Log.getImportance(), and com.neuronrobotics.sdk.common.Log.getImportanceColor().
◆ errStream
|
staticprivate |
The err stream.
Definition at line 73 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.common.Log.getErrStream(), and com.neuronrobotics.sdk.common.Log.setErrStream().
◆ INFO
|
static |
The Constant INFO.
Definition at line 39 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.enableInfoPrint(), com.neuronrobotics.sdk.common.Log.getImportance(), com.neuronrobotics.sdk.common.Log.getImportanceColor(), com.neuronrobotics.sdk.common.Log.info(), and com.neuronrobotics.sdk.common.Log.Log().
◆ instance
|
staticprivate |
The instance.
Definition at line 51 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.common.Log.debug(), com.neuronrobotics.sdk.common.Log.enableSystemPrint(), com.neuronrobotics.sdk.common.Log.error(), com.neuronrobotics.sdk.common.Log.getMinimumPrintLevel(), com.neuronrobotics.sdk.common.Log.info(), com.neuronrobotics.sdk.common.Log.instance(), com.neuronrobotics.sdk.common.Log.isPrinting(), com.neuronrobotics.sdk.common.Log.isUseColoredPrints(), com.neuronrobotics.sdk.common.Log.log(), com.neuronrobotics.sdk.common.Log.setMinimumPrintLevel(), com.neuronrobotics.sdk.common.Log.setUseColoredPrints(), and com.neuronrobotics.sdk.common.Log.warning().
◆ LOG
|
static |
The Constant LOG.
Definition at line 36 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.common.Log.getImportance(), com.neuronrobotics.sdk.common.Log.getImportanceColor(), and com.neuronrobotics.sdk.common.Log.log().
◆ m
|
private |
The messages.
Definition at line 54 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.add().
◆ minprintlevel
|
private |
The minprintlevel.
Definition at line 61 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.common.Log.getMinimumPrintLevel(), and com.neuronrobotics.sdk.common.Log.setMinimumPrintLevel().
◆ outStream
|
staticprivate |
The out stream.
Definition at line 70 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.common.Log.getOutStream(), and com.neuronrobotics.sdk.common.Log.setOutStream().
◆ systemprint
|
private |
The systemprint.
Definition at line 64 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.add(), com.neuronrobotics.sdk.common.Log.enableSystemPrint(), and com.neuronrobotics.sdk.common.Log.isPrinting().
◆ useColoredPrints
|
private |
The use colored prints.
Definition at line 76 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.isUseColoredPrints(), and com.neuronrobotics.sdk.common.Log.setUseColoredPrints().
◆ WARNING
|
static |
The Constant WARNING.
Definition at line 45 of file Log.java.
Referenced by com.neuronrobotics.sdk.common.Log.enableWarningPrint(), com.neuronrobotics.sdk.common.Log.getImportance(), com.neuronrobotics.sdk.common.Log.getImportanceColor(), and com.neuronrobotics.sdk.common.Log.warning().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/common/Log.java