Public Member Functions | |
| RotationNRLegacy () | |
| RotationNRLegacy (double tilt, double elevation, double azumeth) | |
| RotationNRLegacy (double[][] rotationMatrix) | |
| RotationNRLegacy (double[] values) | |
| RotationNRLegacy (double w, double x, double y, double z) | |
| RotationNRLegacy (Matrix m) | |
| double[][] | getRotationMatrix () |
| String | toString () |
| String | toString (double[][] array) |
| double | getRotationTilt () |
| double | getRotationElevation () |
| double | getRotationAzimuth () |
| double | getRotationMatrix2QuaturnionW () |
| double | getRotationMatrix2QuaturnionX () |
| double | getRotationMatrix2QuaturnionY () |
| double | getRotationMatrix2QuaturnionZ () |
Static Public Member Functions | |
| static RotationNRLegacy | getRotationX (double rotationAngleDegrees) |
| static RotationNRLegacy | getRotationY (double rotationAngleDegrees) |
| static RotationNRLegacy | getRotationZ (double rotationAngleDegrees) |
| static boolean | bound (double low, double high, double n) |
Protected Member Functions | |
| void | quaternion2RotationMatrix (double w, double x, double y, double z) |
Private Member Functions | |
| void | loadFromAngles (double tilt, double azumeth, double elevation) |
| void | loadRotations (double[][] rotM) |
| double | getRotAngle (int index) |
Detailed Description
This class is to represent a 3x3 rotation sub-matrix This class also contains static methods for dealing with 3x3 rotations.
Definition at line 16 of file RotationNRLegacy.java.
Constructor & Destructor Documentation
◆ RotationNRLegacy() [1/6]
| com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy | ( | ) |
Null constructor forms a.
Definition at line 24 of file RotationNRLegacy.java.
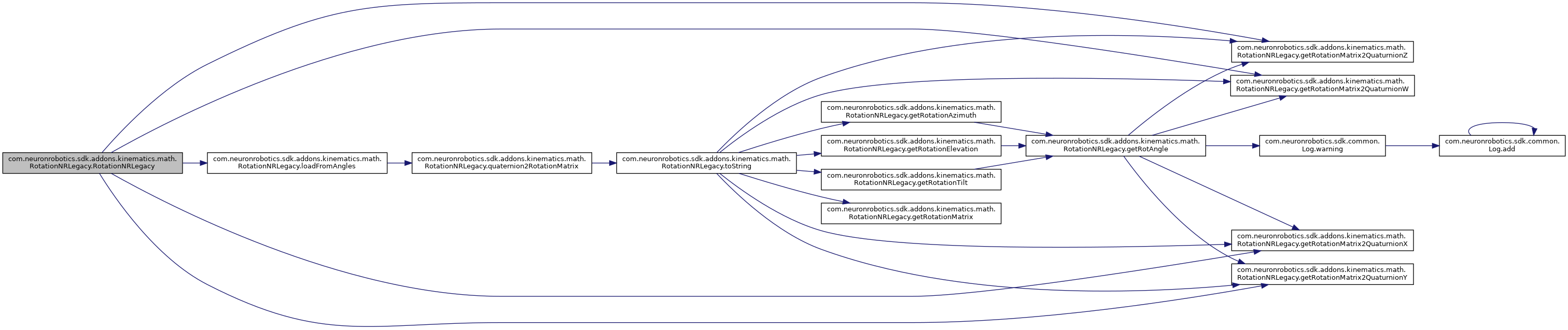
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationX(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationY(), and com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationZ().
◆ RotationNRLegacy() [2/6]
| com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy | ( | double | tilt, |
| double | elevation, | ||
| double | azumeth | ||
| ) |
Instantiates a new rotation nr.
- Parameters
-
elevation the elevation tilt the tilt azumeth the azumeth
Definition at line 38 of file RotationNRLegacy.java.
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionW(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionX(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionY(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionZ(), and com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.loadFromAngles().
◆ RotationNRLegacy() [3/6]
| com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy | ( | double | rotationMatrix[][] | ) |
Instantiates a new rotation nr.
- Parameters
-
rotationMatrix the rotation matrix
Definition at line 89 of file RotationNRLegacy.java.
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.loadRotations().

◆ RotationNRLegacy() [4/6]
| com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy | ( | double[] | values | ) |
Instantiates a new rotation nr.
- Parameters
-
values the values
Definition at line 99 of file RotationNRLegacy.java.
◆ RotationNRLegacy() [5/6]
| com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy | ( | double | w, |
| double | x, | ||
| double | y, | ||
| double | z | ||
| ) |
Instantiates a new rotation nr.
- Parameters
-
w the w x the x y the y z the z
Definition at line 197 of file RotationNRLegacy.java.
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.quaternion2RotationMatrix().

◆ RotationNRLegacy() [6/6]
| com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy | ( | Matrix | m | ) |
Instantiates a new rotation nr.
- Parameters
-
m the m
Definition at line 207 of file RotationNRLegacy.java.
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.loadRotations().

Member Function Documentation
◆ bound()
|
static |
Bound.
- Parameters
-
low the low high the high n the n
- Returns
- true, if successful
Definition at line 472 of file RotationNRLegacy.java.
◆ getRotAngle()
|
private |
Gets the rot angle.
- Parameters
-
index the index
- Returns
- the rot angle
Definition at line 483 of file RotationNRLegacy.java.
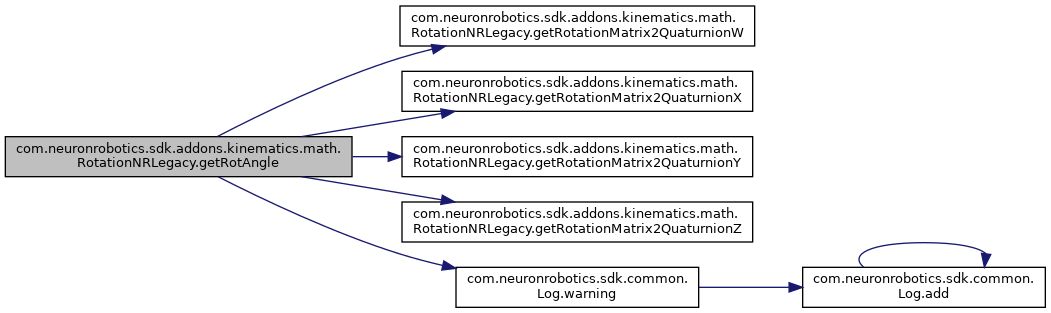
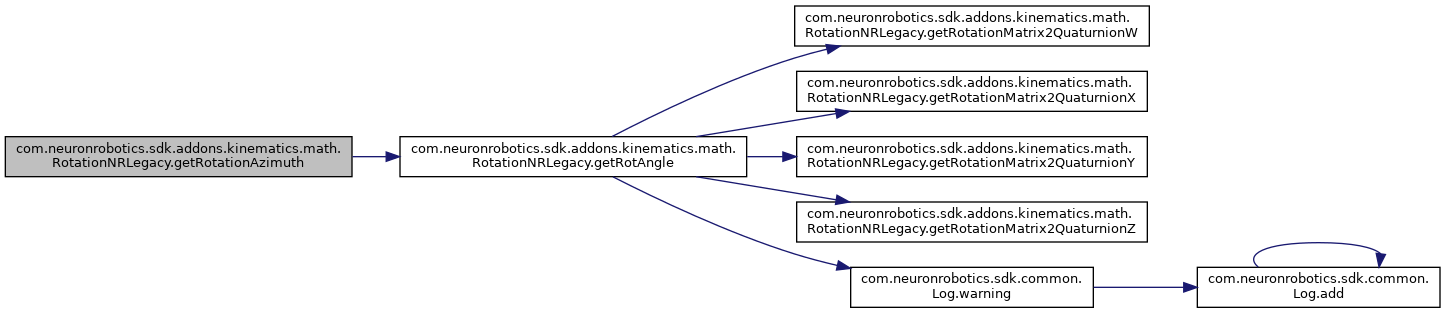
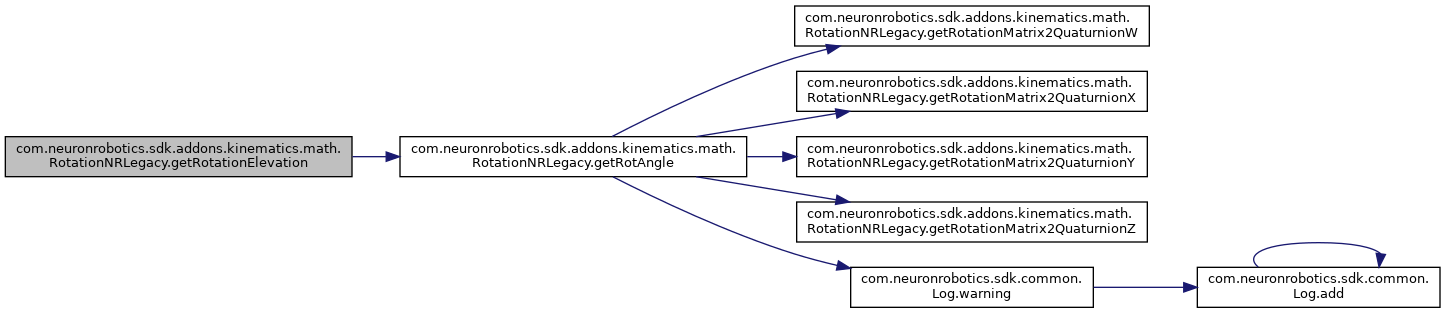
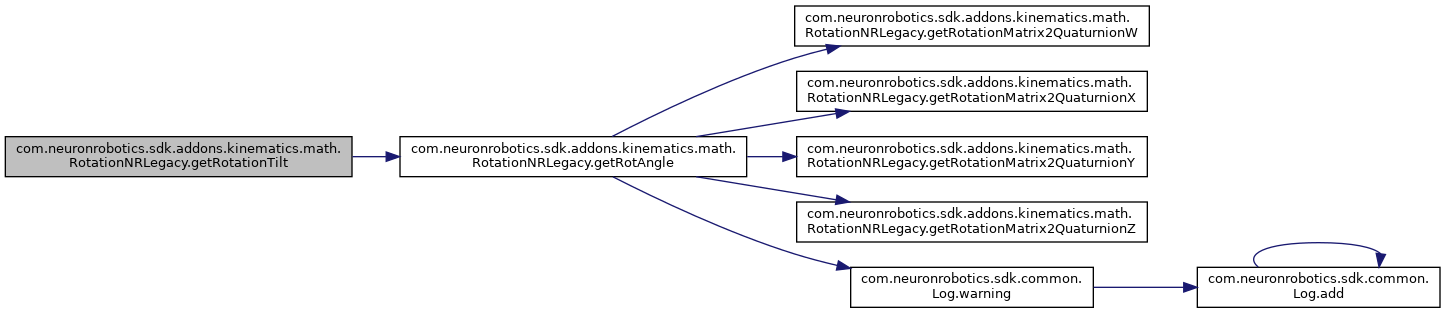
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionW(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionX(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionY(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionZ(), and com.neuronrobotics.sdk.common.Log.warning().
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationAzimuth(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationElevation(), and com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationTilt().
◆ getRotationAzimuth()
| double com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationAzimuth | ( | ) |
Gets the rotation azimuth.
- Returns
- the rotation azimuth
Definition at line 576 of file RotationNRLegacy.java.
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotAngle().
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.toString().
◆ getRotationElevation()
| double com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationElevation | ( | ) |
Gets the rotation elevation.
- Returns
- the rotation elevation
Definition at line 566 of file RotationNRLegacy.java.
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotAngle().
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.toString().
◆ getRotationMatrix()
| double [][] com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix | ( | ) |
Gets the rotation matrix.
- Returns
- the rotation matrix
Definition at line 246 of file RotationNRLegacy.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.toString().
◆ getRotationMatrix2QuaturnionW()
| double com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionW | ( | ) |
Gets the rotation x.
- Returns
- the rotation x Gets the rotation y.
- the rotation y Gets the rotation z.
- the rotation z Gets the rotation matrix2 quaturnion w.
- the rotation matrix2 quaturnion w
Definition at line 620 of file RotationNRLegacy.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotAngle(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy(), and com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.toString().
◆ getRotationMatrix2QuaturnionX()
| double com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionX | ( | ) |
Gets the rotation matrix2 quaturnion x.
- Returns
- the rotation matrix2 quaturnion x
Definition at line 632 of file RotationNRLegacy.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotAngle(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy(), and com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.toString().
◆ getRotationMatrix2QuaturnionY()
| double com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionY | ( | ) |
Gets the rotation matrix2 quaturnion y.
- Returns
- the rotation matrix2 quaturnion y
Definition at line 642 of file RotationNRLegacy.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotAngle(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy(), and com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.toString().
◆ getRotationMatrix2QuaturnionZ()
| double com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionZ | ( | ) |
Gets the rotation matrix2 quaturnion z.
- Returns
- the rotation matrix2 quaturnion z
Definition at line 652 of file RotationNRLegacy.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotAngle(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy(), and com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.toString().
◆ getRotationTilt()
| double com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationTilt | ( | ) |
Gets the rotation tilt.
- Returns
- the rotation tilt
Definition at line 555 of file RotationNRLegacy.java.
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotAngle().
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.toString().
◆ getRotationX()
|
static |
Get a rotation matrix with a rotation around X.
- Parameters
-
rotationAngleDegrees in degrees
- Returns
- the static matrix
Definition at line 110 of file RotationNRLegacy.java.
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy().

◆ getRotationY()
|
static |
Get a rotation matrix with a rotation around Y.
- Parameters
-
rotationAngleDegrees in degrees
- Returns
- the static matrix
Definition at line 137 of file RotationNRLegacy.java.
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy().

◆ getRotationZ()
|
static |
Get a rotation matrix with a rotation around Z.
- Parameters
-
rotationAngleDegrees in degrees
- Returns
- the static matrix
Definition at line 164 of file RotationNRLegacy.java.
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy().

◆ loadFromAngles()
|
private |
Definition at line 57 of file RotationNRLegacy.java.
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.quaternion2RotationMatrix().
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy().

◆ loadRotations()
|
private |
Load rotations.
- Parameters
-
rotM the rot m
Definition at line 223 of file RotationNRLegacy.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy().
◆ quaternion2RotationMatrix()
|
protected |
Quaternion2 rotation matrix.
- Parameters
-
w the w x the x y the y z the z
Definition at line 312 of file RotationNRLegacy.java.
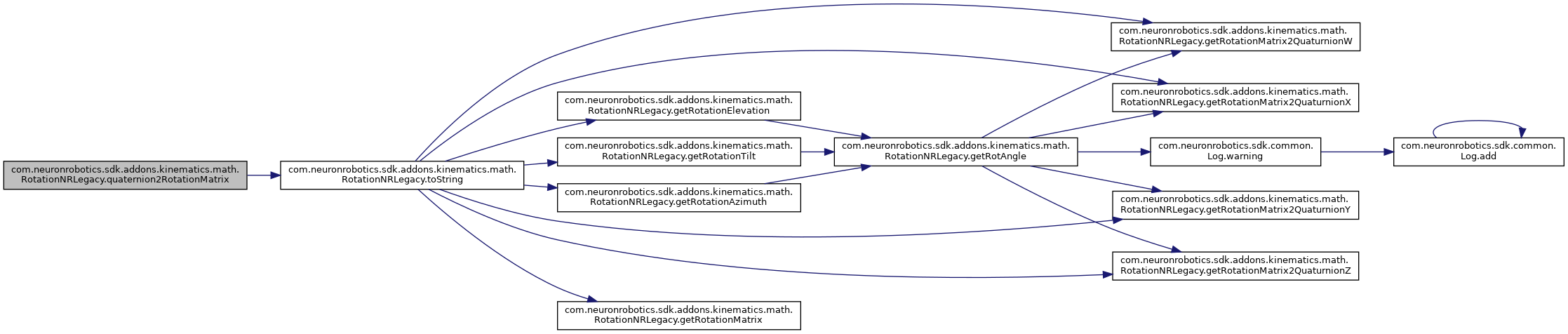
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.toString().
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.loadFromAngles(), and com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.RotationNRLegacy().
◆ toString() [1/2]
| String com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.toString | ( | ) |
Definition at line 262 of file RotationNRLegacy.java.
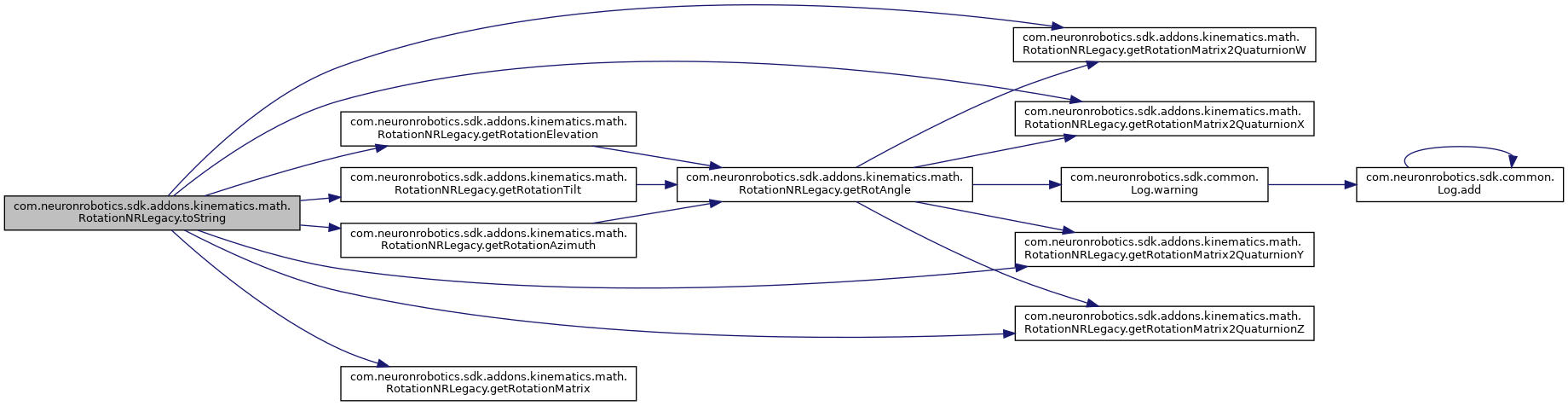
References com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationAzimuth(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationElevation(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionW(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionX(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionY(), com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationMatrix2QuaturnionZ(), and com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.getRotationTilt().
Referenced by com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.quaternion2RotationMatrix().
◆ toString() [2/2]
| String com.neuronrobotics.sdk.addons.kinematics.math.RotationNRLegacy.toString | ( | double | array[][] | ) |
To string.
- Parameters
-
array the array
- Returns
- the string
Definition at line 287 of file RotationNRLegacy.java.
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/math/RotationNRLegacy.java