
Classes | |
| class | MapData |
| class | Tester |
Private Member Functions | |
| void | initInput () |
Private Attributes | |
| ServoChannel | output |
| double | inputScale =.25 |
| int | inputCenter = 128 |
| int | inputValue |
| boolean | recording =false |
| double | interval |
| int | currentValue |
| ArrayList< MapData > | data = new ArrayList<MapData>() |
| int | outputMax =255 |
| int | outputMin =0 |
| int | index =0 |
| Tester | directTester |
| int | analogInputChannelNumber =8 |
Detailed Description
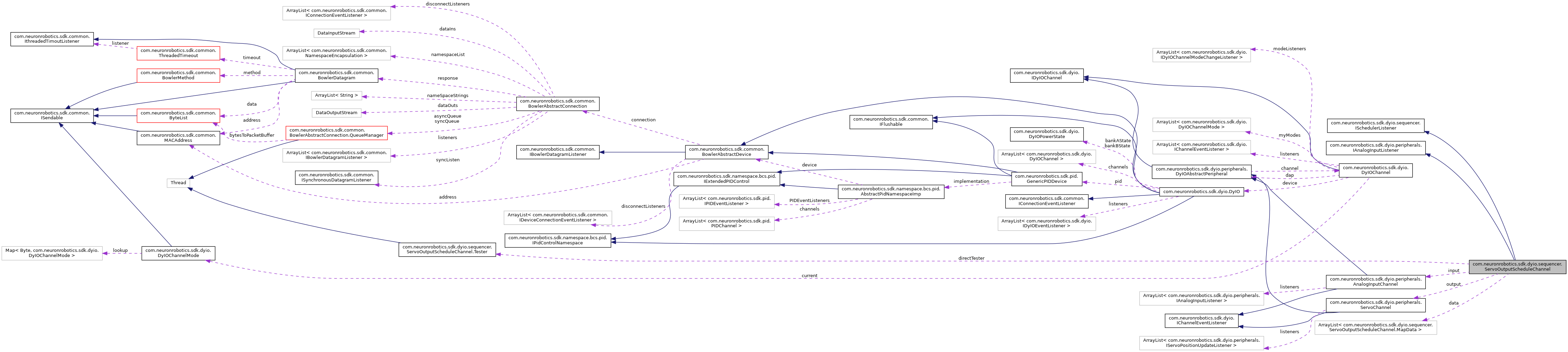
The Class ServoOutputScheduleChannel.
Definition at line 14 of file ServoOutputScheduleChannel.java.
Constructor & Destructor Documentation
◆ ServoOutputScheduleChannel()
| com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.ServoOutputScheduleChannel | ( | ServoChannel | srv | ) |
Instantiates a new servo output schedule channel.
- Parameters
-
srv the srv
Definition at line 63 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.getValue(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.output, and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setCurrentValue().

Member Function Documentation
◆ addAnalogInputListener()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.addAnalogInputListener | ( | IAnalogInputListener | l | ) |
Adds the analog input listener.
- Parameters
-
l the l
Definition at line 105 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.AnalogInputChannel.addAnalogInputListener(), com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.configAdvancedAsyncNotEqual(), and com.neuronrobotics.sdk.dyio.peripherals.AnalogInputChannel.setAsync().
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.initInput().

◆ addIServoPositionUpdateListener()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.addIServoPositionUpdateListener | ( | IServoPositionUpdateListener | l | ) |
Adds the i servo position update listener.
- Parameters
-
l the l
Definition at line 320 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.ServoChannel.addIServoPositionUpdateListener(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getOutput().

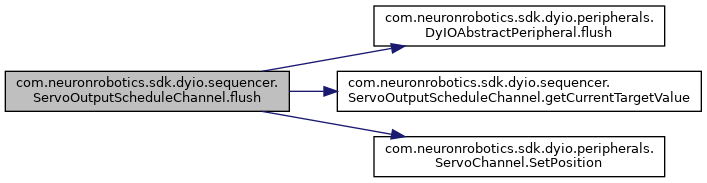
◆ flush()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.flush | ( | ) |
Flush.
Definition at line 455 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.flush(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getCurrentTargetValue(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.output, and com.neuronrobotics.sdk.dyio.peripherals.ServoChannel.SetPosition().
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.Tester.run().
◆ getAnalogInputChannelNumber()
| int com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getAnalogInputChannelNumber | ( | ) |
Gets the analog input channel number.
- Returns
- the analog input channel number
Definition at line 475 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.analogInputChannelNumber, com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.getChannel(), and com.neuronrobotics.sdk.dyio.DyIOChannel.getChannelNumber().
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getInputChannelNumber(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getXml(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.initInput().

◆ getChannelNumber()
| int com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getChannelNumber | ( | ) |
Gets the channel number.
- Returns
- the channel number
Definition at line 74 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.getChannel(), com.neuronrobotics.sdk.dyio.DyIOChannel.getChannelNumber(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.output.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getXml(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.startTest().

◆ getCurrentTargetValue()
| int com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getCurrentTargetValue | ( | ) |
Gets the current target value.
- Returns
- the current target value
Definition at line 448 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.inputValue.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.flush(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onAnalogValueChange(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onTimeUpdate(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setIntervalTime().
◆ getCurrentValue()
| int com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getCurrentValue | ( | ) |
Gets the current value.
- Returns
- the current value
Definition at line 550 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.currentValue.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onTimeUpdate(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setIntervalTime(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.sync().
◆ getInputCenter()
| int com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getInputCenter | ( | ) |
Gets the input center.
- Returns
- the input center
Definition at line 237 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.inputCenter.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onAnalogValueChange().
◆ getInputChannelNumber()
| int com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getInputChannelNumber | ( | ) |
Gets the input channel number.
- Returns
- the input channel number
Definition at line 364 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getAnalogInputChannelNumber(), com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.getChannel(), and com.neuronrobotics.sdk.dyio.DyIOChannel.getChannelNumber().

◆ getInputScale()
| double com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getInputScale | ( | ) |
Gets the input scale.
- Returns
- the input scale
Definition at line 255 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.inputScale.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onAnalogValueChange().
◆ getInterval()
| double com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getInterval | ( | ) |
Gets the interval.
- Returns
- the interval
Definition at line 427 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.interval.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onTimeUpdate(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.Tester.run().
◆ getOutput()
| ServoChannel com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getOutput | ( | ) |
Gets the output.
- Returns
- the output
Definition at line 219 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.output.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.addIServoPositionUpdateListener(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.removeIServoPositionUpdateListener(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.sync().
◆ getOutputMax()
| int com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getOutputMax | ( | ) |
Gets the output max.
- Returns
- the output max
Definition at line 275 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.outputMax.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onAnalogValueChange(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setIntervalTime().
◆ getOutputMin()
| int com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getOutputMin | ( | ) |
Gets the output min.
- Returns
- the output min
Definition at line 284 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.outputMin.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onAnalogValueChange(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setIntervalTime().
◆ getXml()
| String com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getXml | ( | ) |
Gets the xml.
- Returns
- the xml
Definition at line 338 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.data, com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getAnalogInputChannelNumber(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getChannelNumber(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.inputCenter, com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.inputScale, com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.isRecording(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.outputMax, and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.outputMin.

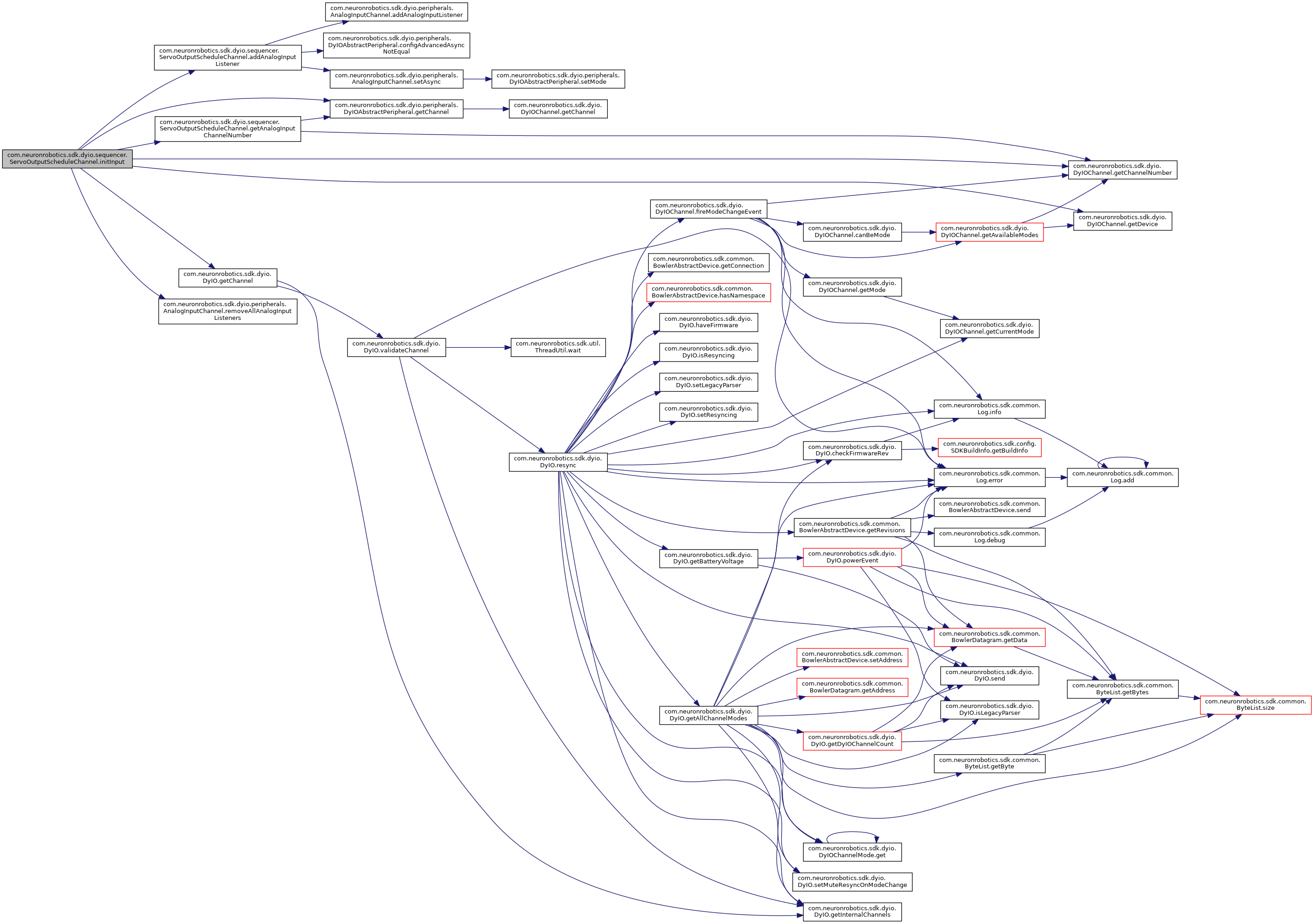
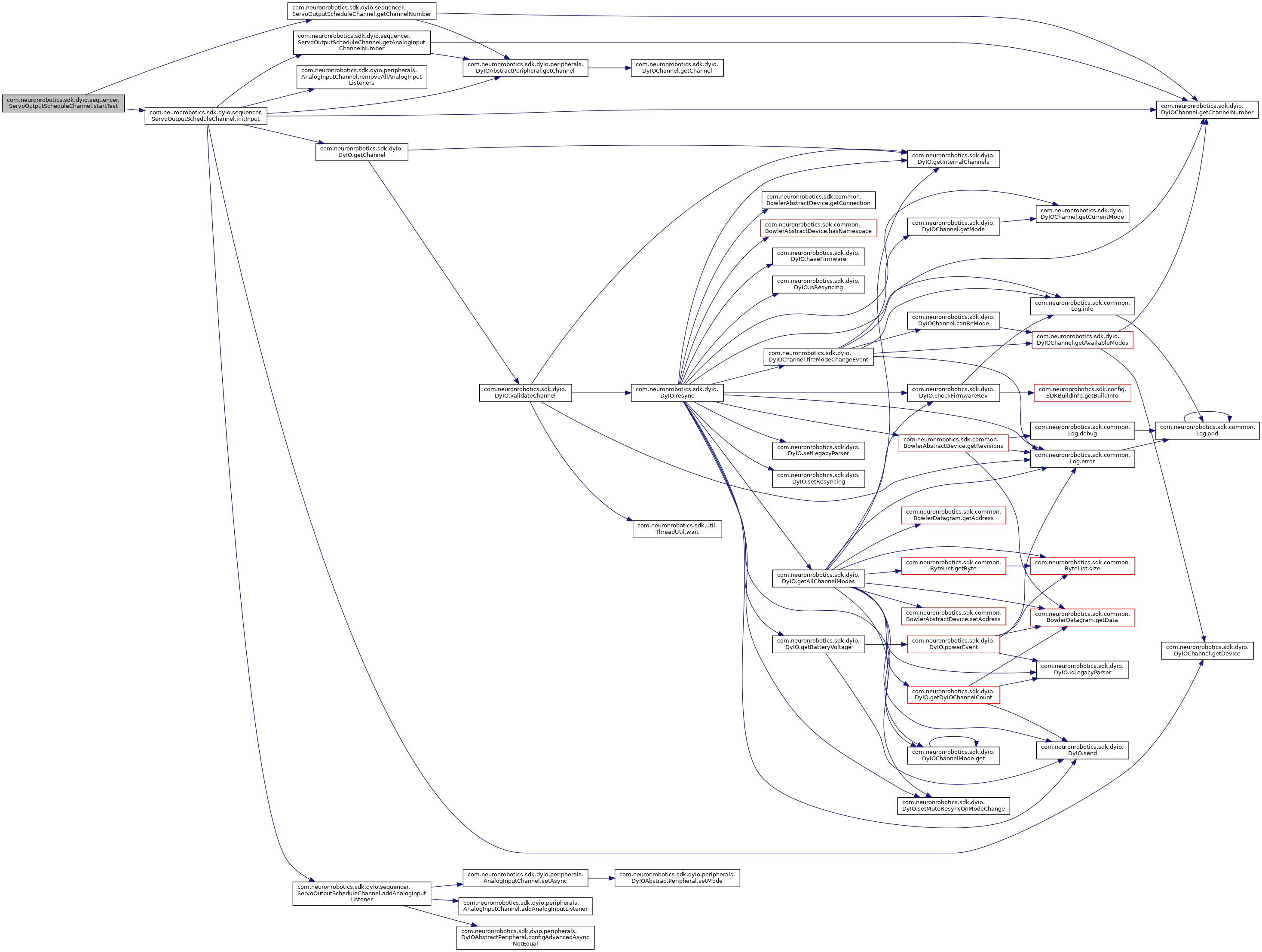
◆ initInput()
|
private |
Inits the input.
Definition at line 114 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.addAnalogInputListener(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.analogInputChannelNumber, com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getAnalogInputChannelNumber(), com.neuronrobotics.sdk.dyio.peripherals.DyIOAbstractPeripheral.getChannel(), com.neuronrobotics.sdk.dyio.DyIO.getChannel(), com.neuronrobotics.sdk.dyio.DyIOChannel.getChannelNumber(), com.neuronrobotics.sdk.dyio.DyIOChannel.getDevice(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.output, and com.neuronrobotics.sdk.dyio.peripherals.AnalogInputChannel.removeAllAnalogInputListeners().
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.resumeRecording(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.startRecording(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.startTest().
◆ isRecording()
| boolean com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.isRecording | ( | ) |
Checks if is recording.
- Returns
- true, if is recording
Definition at line 311 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.recording.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getXml(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onTimeUpdate().
◆ isTesting()
| boolean com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.isTesting | ( | ) |
Checks if is testing.
- Returns
- true, if is testing
Definition at line 409 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.directTester.
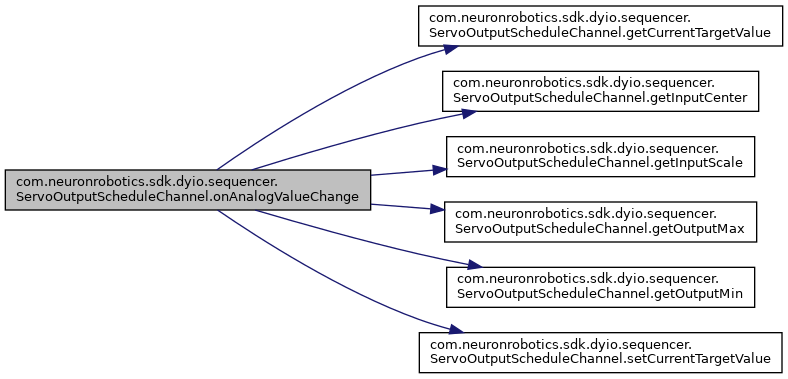
◆ onAnalogValueChange()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onAnalogValueChange | ( | AnalogInputChannel | chan, |
| double | value | ||
| ) |
IAnalogInputListener.
- Parameters
-
chan the chan value The value of the analog channel is sent to listeners
Implements com.neuronrobotics.sdk.dyio.peripherals.IAnalogInputListener.
Definition at line 186 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getCurrentTargetValue(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getInputCenter(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getInputScale(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getOutputMax(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getOutputMin(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setCurrentTargetValue().
◆ onPause()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onPause | ( | ) |
On pause.
Implements com.neuronrobotics.sdk.dyio.sequencer.ISchedulerListener.
Definition at line 540 of file ServoOutputScheduleChannel.java.
◆ onPlay()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onPlay | ( | ) |
On play.
Implements com.neuronrobotics.sdk.dyio.sequencer.ISchedulerListener.
Definition at line 531 of file ServoOutputScheduleChannel.java.
◆ onReset()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onReset | ( | ) |
This function is called when the seceduler is stopped.
Implements com.neuronrobotics.sdk.dyio.sequencer.ISchedulerListener.
Definition at line 522 of file ServoOutputScheduleChannel.java.
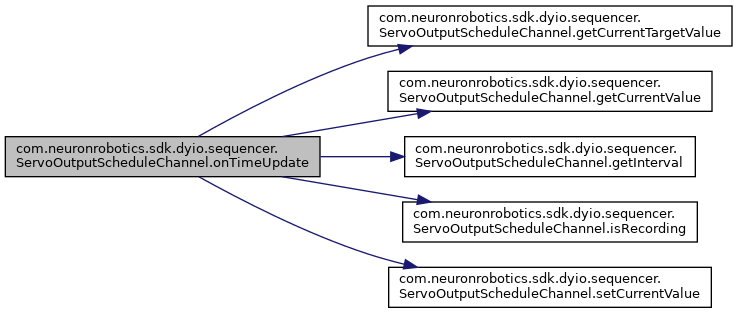
◆ onTimeUpdate()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onTimeUpdate | ( | double | ms | ) |
This is called by the scheduler on regular intervals .
- Parameters
-
ms the current time of the running scheduler
Implements com.neuronrobotics.sdk.dyio.sequencer.ISchedulerListener.
Definition at line 139 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.data, com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getCurrentTargetValue(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getCurrentValue(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getInterval(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.index, com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.isRecording(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setCurrentValue().
◆ pauseRecording()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.pauseRecording | ( | ) |
Pause recording.
Definition at line 81 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.peripherals.AnalogInputChannel.removeAnalogInputListener(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setRecording().
Referenced by com.neuronrobotics.sdk.dyio.sequencer.CoreScheduler.loadFromFile().

◆ removeIServoPositionUpdateListener()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.removeIServoPositionUpdateListener | ( | IServoPositionUpdateListener | l | ) |
Removes the i servo position update listener.
- Parameters
-
l the l
Definition at line 329 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getOutput(), and com.neuronrobotics.sdk.dyio.peripherals.ServoChannel.removeIServoPositionUpdateListener().

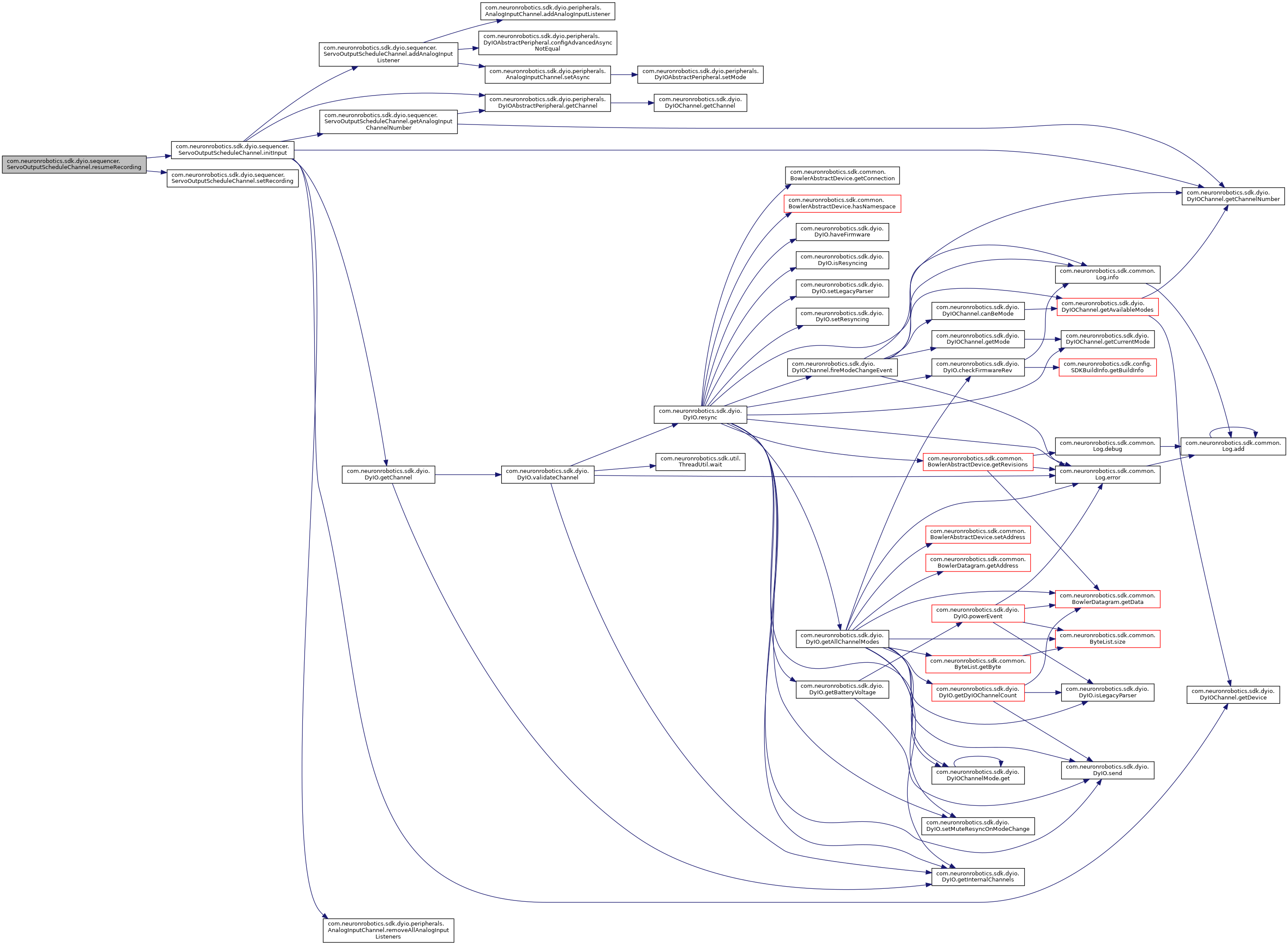
◆ resumeRecording()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.resumeRecording | ( | ) |
Resume recording.
Definition at line 91 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.initInput(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setRecording().
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.startRecording().
◆ setAnalogInputChannelNumber()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setAnalogInputChannelNumber | ( | int | analogInputChannelNumber | ) |
Sets the analog input channel number.
- Parameters
-
analogInputChannelNumber the new analog input channel number
Definition at line 465 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.analogInputChannelNumber.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.CoreScheduler.loadFromFile().
◆ setCurrentTargetValue()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setCurrentTargetValue | ( | int | inputValue | ) |
Sets the current target value.
- Parameters
-
inputValue the new current target value
Definition at line 436 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.inputValue.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onAnalogValueChange(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setIntervalTime().
◆ setCurrentValue()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setCurrentValue | ( | int | currentValue | ) |
Sets the current value.
- Parameters
-
currentValue the new current value
Definition at line 559 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.currentValue.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onTimeUpdate(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.ServoOutputScheduleChannel(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setIntervalTime().
◆ setData()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setData | ( | int[] | data2 | ) |
Sets the data.
- Parameters
-
data2 the new data
Definition at line 375 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.data.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.CoreScheduler.loadFromFile().
◆ setInputCenter()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setInputCenter | ( | int | inputCenter | ) |
Sets the input center.
- Parameters
-
inputCenter the new input center
Definition at line 228 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.inputCenter.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.CoreScheduler.loadFromFile().
◆ setInputScale()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setInputScale | ( | double | inputScale | ) |
Sets the input scale.
- Parameters
-
inputScale the new input scale
Definition at line 246 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.inputScale.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.CoreScheduler.loadFromFile().
◆ setInterval()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setInterval | ( | double | interval | ) |
Sets the interval.
- Parameters
-
interval the new interval
Definition at line 418 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.interval.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setIntervalTime().
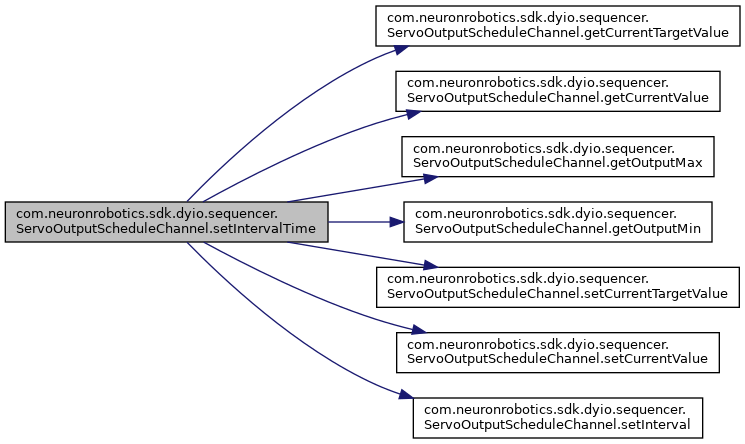
◆ setIntervalTime()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setIntervalTime | ( | int | msInterval, |
| int | totalTime | ||
| ) |
This method is to configure the listeners timing. This passes in the time interval that the scheduler will run at
- Parameters
-
msInterval the total time for the loop totalTime the total time
Implements com.neuronrobotics.sdk.dyio.sequencer.ISchedulerListener.
Definition at line 160 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.data, com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getCurrentTargetValue(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getCurrentValue(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getOutputMax(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getOutputMin(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setCurrentTargetValue(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setCurrentValue(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setInterval().
Referenced by com.neuronrobotics.sdk.dyio.sequencer.CoreScheduler.addServoChannel().
◆ setOutput()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setOutput | ( | ServoChannel | output | ) |
Sets the output.
- Parameters
-
output the new output
Definition at line 210 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.output.
◆ setOutputMinMax()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setOutputMinMax | ( | int | outputMin, |
| int | outputMax | ||
| ) |
Sets the output min max.
- Parameters
-
outputMin the output min outputMax the output max
Definition at line 265 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.outputMax, and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.outputMin.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.CoreScheduler.loadFromFile().
◆ setRecording()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setRecording | ( | boolean | recording | ) |
Sets the recording.
- Parameters
-
recording the new recording
Definition at line 486 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.recording.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.pauseRecording(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.resumeRecording().
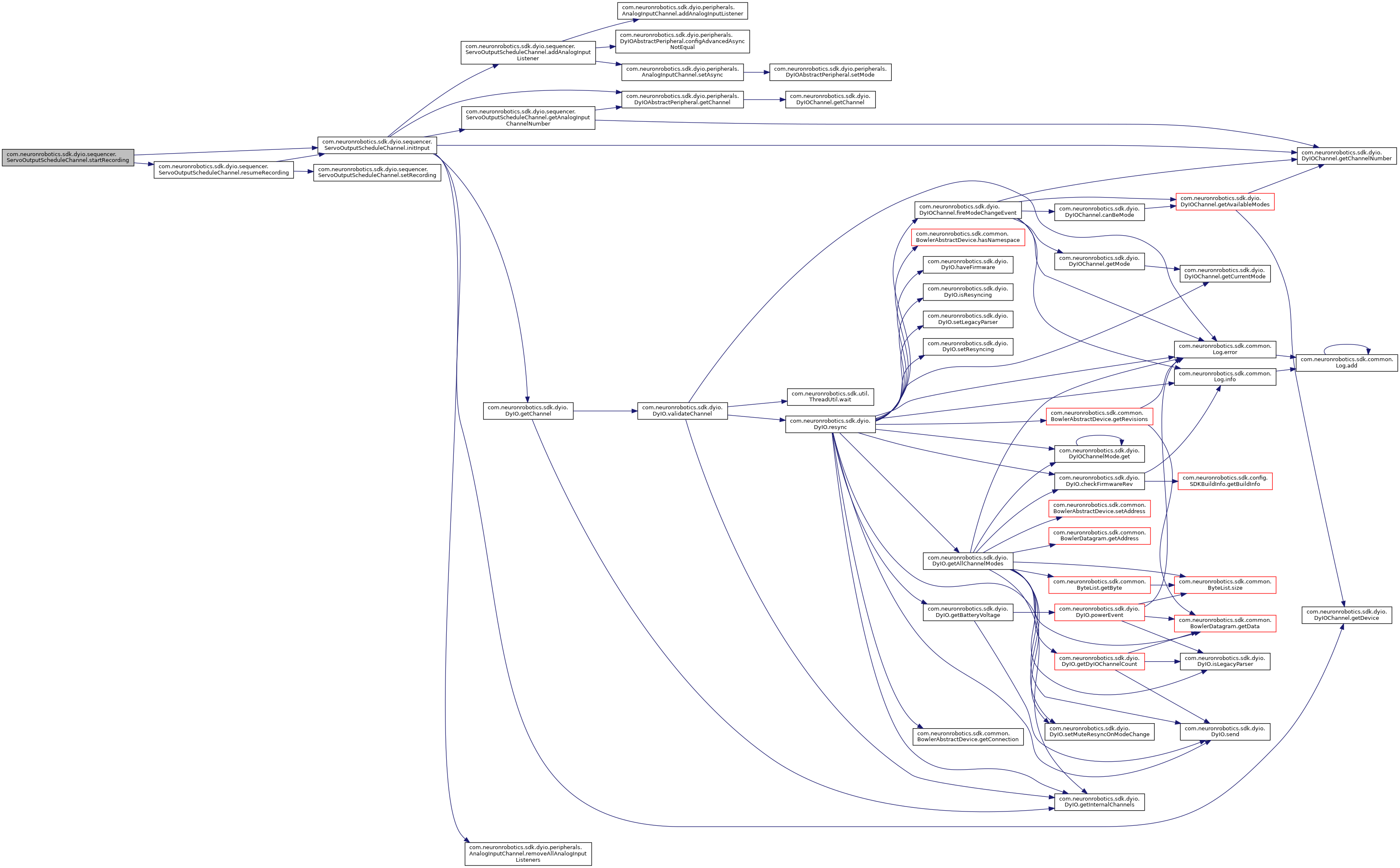
◆ startRecording()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.startRecording | ( | ) |
Start recording.
Definition at line 130 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.initInput(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.resumeRecording().
Referenced by com.neuronrobotics.sdk.dyio.sequencer.CoreScheduler.loadFromFile().
◆ startTest()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.startTest | ( | ) |
Start test.
Definition at line 385 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.directTester, com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getChannelNumber(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.initInput().
◆ stopTest()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.stopTest | ( | ) |
Stop test.
Definition at line 395 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.directTester, com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.Tester.kill(), and com.neuronrobotics.sdk.dyio.peripherals.AnalogInputChannel.removeAnalogInputListener().

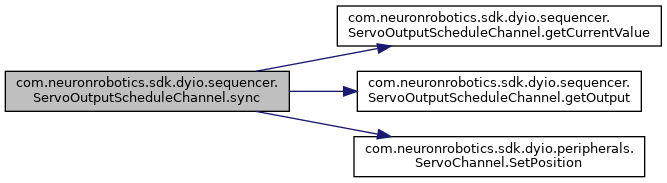
◆ sync()
| void com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.sync | ( | int | loopTime | ) |
Sync.
- Parameters
-
loopTime the loop time
Definition at line 568 of file ServoOutputScheduleChannel.java.
References com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getCurrentValue(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getOutput(), and com.neuronrobotics.sdk.dyio.peripherals.ServoChannel.SetPosition().
Member Data Documentation
◆ analogInputChannelNumber
|
private |
The analog input channel number.
Definition at line 56 of file ServoOutputScheduleChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getAnalogInputChannelNumber(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.initInput(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setAnalogInputChannelNumber().
◆ currentValue
|
private |
The current value.
Definition at line 38 of file ServoOutputScheduleChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getCurrentValue(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setCurrentValue().
◆ data
|
private |
The data.
Definition at line 41 of file ServoOutputScheduleChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getXml(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onTimeUpdate(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setData(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setIntervalTime().
◆ directTester
|
private |
The direct tester.
Definition at line 53 of file ServoOutputScheduleChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.isTesting(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.startTest(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.stopTest().
◆ index
|
private |
The index.
Definition at line 50 of file ServoOutputScheduleChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.onTimeUpdate().
◆ inputCenter
|
private |
The input center.
Definition at line 26 of file ServoOutputScheduleChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getInputCenter(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getXml(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setInputCenter().
◆ inputScale
|
private |
The input scale.
Definition at line 23 of file ServoOutputScheduleChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getInputScale(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getXml(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setInputScale().
◆ inputValue
|
private |
The input value.
Definition at line 29 of file ServoOutputScheduleChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getCurrentTargetValue(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setCurrentTargetValue().
◆ interval
|
private |
The interval.
Definition at line 35 of file ServoOutputScheduleChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getInterval(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setInterval().
◆ output
|
private |
The output.
Definition at line 17 of file ServoOutputScheduleChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.flush(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getChannelNumber(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getOutput(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.initInput(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.ServoOutputScheduleChannel(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setOutput().
◆ outputMax
|
private |
The output max.
Definition at line 44 of file ServoOutputScheduleChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getOutputMax(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getXml(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setOutputMinMax().
◆ outputMin
|
private |
The output min.
Definition at line 47 of file ServoOutputScheduleChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getOutputMin(), com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.getXml(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setOutputMinMax().
◆ recording
|
private |
The recording.
Definition at line 32 of file ServoOutputScheduleChannel.java.
Referenced by com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.isRecording(), and com.neuronrobotics.sdk.dyio.sequencer.ServoOutputScheduleChannel.setRecording().
The documentation for this class was generated from the following file:
- src/main/java/com/neuronrobotics/sdk/dyio/sequencer/ServoOutputScheduleChannel.java