
Public Member Functions | |
| DyPIDConfiguration (int group) | |
| DyPIDConfiguration (int group, int inputChannel, DyIOChannelMode inputMode, int outputChannel, DyIOChannelMode outputMode) | |
| DyPIDConfiguration (BowlerDatagram conf) | |
| void | setGroup (int group) |
| int | getGroup () |
| void | setInputChannel (int inputChannel) |
| int | getInputChannel () |
| void | setInputMode (DyIOChannelMode inputMode) |
| DyIOChannelMode | getInputMode () |
| void | setOutputChannel (int outputChannel) |
| int | getOutputChannel () |
| void | setOutputMode (DyIOChannelMode outputMode) |
| DyIOChannelMode | getOutputMode () |
Private Attributes | |
| int | group |
| int | inputChannel |
| DyIOChannelMode | inputMode =DyIOChannelMode.DIGITAL_IN |
| int | outputChannel |
| DyIOChannelMode | outputMode =DyIOChannelMode.DIGITAL_OUT |
Detailed Description
The Class DyPIDConfiguration.
Definition at line 10 of file DyPIDConfiguration.java.
Constructor & Destructor Documentation
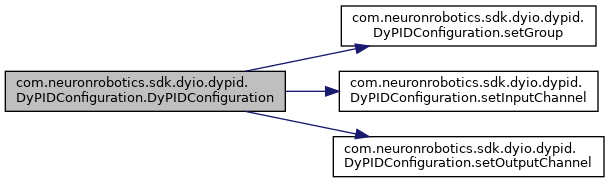
◆ DyPIDConfiguration() [1/3]
| com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.DyPIDConfiguration | ( | int | group | ) |
Instantiates a new dy pid configuration.
- Parameters
-
group the group
Definition at line 32 of file DyPIDConfiguration.java.
References com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.group, com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setGroup(), com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setInputChannel(), and com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setOutputChannel().
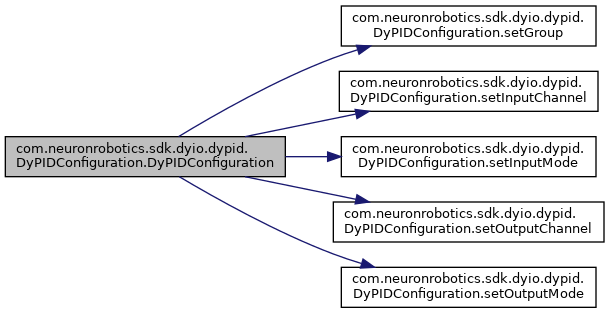
◆ DyPIDConfiguration() [2/3]
| com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.DyPIDConfiguration | ( | int | group, |
| int | inputChannel, | ||
| DyIOChannelMode | inputMode, | ||
| int | outputChannel, | ||
| DyIOChannelMode | outputMode | ||
| ) |
Instantiates a new dy pid configuration.
- Parameters
-
group the group inputChannel the input channel inputMode the input mode outputChannel the output channel outputMode the output mode
Definition at line 48 of file DyPIDConfiguration.java.
References com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.group, com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.inputChannel, com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.inputMode, com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.outputChannel, com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.outputMode, com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setGroup(), com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setInputChannel(), com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setInputMode(), com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setOutputChannel(), and com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setOutputMode().
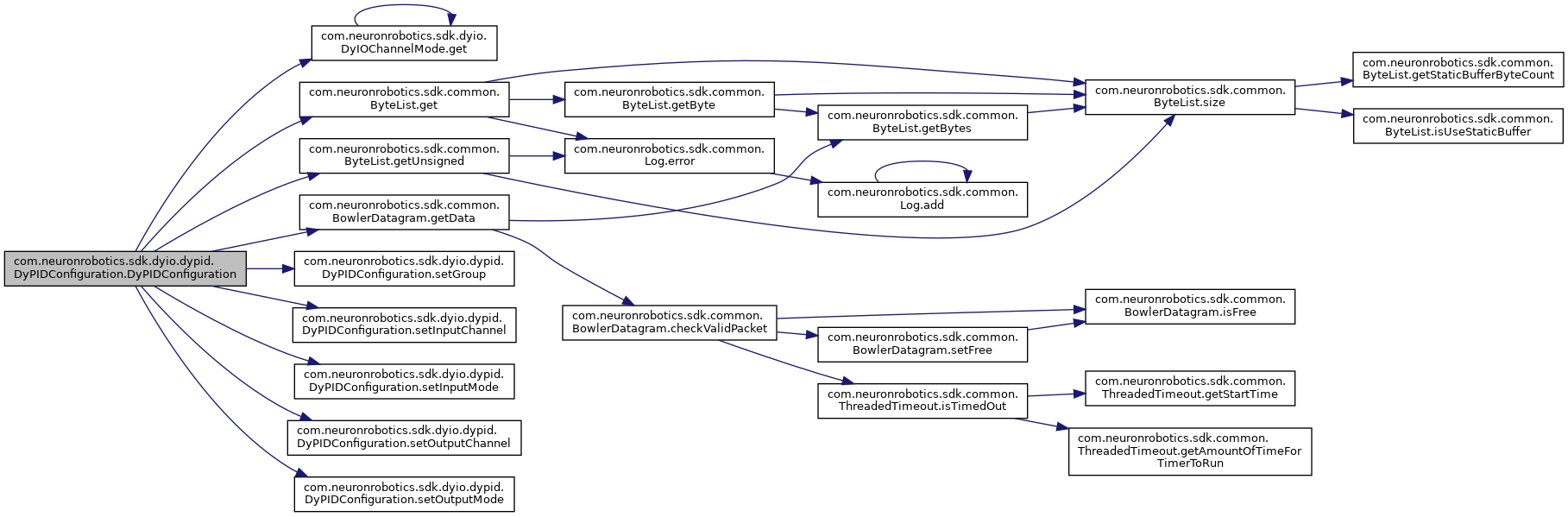
◆ DyPIDConfiguration() [3/3]
| com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.DyPIDConfiguration | ( | BowlerDatagram | conf | ) |
Instantiates a new dy pid configuration.
- Parameters
-
conf the conf
Definition at line 61 of file DyPIDConfiguration.java.
References com.neuronrobotics.sdk.dyio.DyIOChannelMode.get(), com.neuronrobotics.sdk.common.ByteList.get(), com.neuronrobotics.sdk.common.BowlerDatagram.getData(), com.neuronrobotics.sdk.common.ByteList.getUnsigned(), com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setGroup(), com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setInputChannel(), com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setInputMode(), com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setOutputChannel(), and com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setOutputMode().
Member Function Documentation
◆ getGroup()
| int com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.getGroup | ( | ) |
Gets the group.
- Returns
- the group
Definition at line 83 of file DyPIDConfiguration.java.
References com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.group.
Referenced by com.neuronrobotics.sdk.commands.bcs.pid.DyPID.ConfigureDynamicPIDCommand.ConfigureDynamicPIDCommand().
◆ getInputChannel()
| int com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.getInputChannel | ( | ) |
Gets the input channel.
- Returns
- the input channel
Definition at line 101 of file DyPIDConfiguration.java.
References com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.inputChannel.
Referenced by com.neuronrobotics.sdk.commands.bcs.pid.DyPID.ConfigureDynamicPIDCommand.ConfigureDynamicPIDCommand().
◆ getInputMode()
| DyIOChannelMode com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.getInputMode | ( | ) |
Gets the input mode.
- Returns
- the input mode
Definition at line 119 of file DyPIDConfiguration.java.
References com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.inputMode.
Referenced by com.neuronrobotics.sdk.commands.bcs.pid.DyPID.ConfigureDynamicPIDCommand.ConfigureDynamicPIDCommand().
◆ getOutputChannel()
| int com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.getOutputChannel | ( | ) |
Gets the output channel.
- Returns
- the output channel
Definition at line 137 of file DyPIDConfiguration.java.
References com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.outputChannel.
Referenced by com.neuronrobotics.sdk.commands.bcs.pid.DyPID.ConfigureDynamicPIDCommand.ConfigureDynamicPIDCommand().
◆ getOutputMode()
| DyIOChannelMode com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.getOutputMode | ( | ) |
Gets the output mode.
- Returns
- the output mode
Definition at line 155 of file DyPIDConfiguration.java.
References com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.outputMode.
Referenced by com.neuronrobotics.sdk.commands.bcs.pid.DyPID.ConfigureDynamicPIDCommand.ConfigureDynamicPIDCommand().
◆ setGroup()
| void com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setGroup | ( | int | group | ) |
Sets the group.
- Parameters
-
group the new group
Definition at line 74 of file DyPIDConfiguration.java.
References com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.group.
Referenced by com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.DyPIDConfiguration().
◆ setInputChannel()
| void com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setInputChannel | ( | int | inputChannel | ) |
Sets the input channel.
- Parameters
-
inputChannel the new input channel
Definition at line 92 of file DyPIDConfiguration.java.
References com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.inputChannel.
Referenced by com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.DyPIDConfiguration().
◆ setInputMode()
| void com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setInputMode | ( | DyIOChannelMode | inputMode | ) |
Sets the input mode.
- Parameters
-
inputMode the new input mode
Definition at line 110 of file DyPIDConfiguration.java.
References com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.inputMode.
Referenced by com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.DyPIDConfiguration().
◆ setOutputChannel()
| void com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setOutputChannel | ( | int | outputChannel | ) |
Sets the output channel.
- Parameters
-
outputChannel the new output channel
Definition at line 128 of file DyPIDConfiguration.java.
References com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.outputChannel.
Referenced by com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.DyPIDConfiguration().
◆ setOutputMode()
| void com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setOutputMode | ( | DyIOChannelMode | outputMode | ) |
Sets the output mode.
- Parameters
-
outputMode the new output mode
Definition at line 146 of file DyPIDConfiguration.java.
References com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.outputMode.
Referenced by com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.DyPIDConfiguration().
Member Data Documentation
◆ group
|
private |
The group.
Definition at line 13 of file DyPIDConfiguration.java.
Referenced by com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.DyPIDConfiguration(), com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.getGroup(), and com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setGroup().
◆ inputChannel
|
private |
The input channel.
Definition at line 16 of file DyPIDConfiguration.java.
Referenced by com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.DyPIDConfiguration(), com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.getInputChannel(), and com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setInputChannel().
◆ inputMode
|
private |
The input mode.
Definition at line 19 of file DyPIDConfiguration.java.
Referenced by com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.DyPIDConfiguration(), com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.getInputMode(), and com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setInputMode().
◆ outputChannel
|
private |
The output channel.
Definition at line 22 of file DyPIDConfiguration.java.
Referenced by com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.DyPIDConfiguration(), com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.getOutputChannel(), and com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setOutputChannel().
◆ outputMode
|
private |
The output mode.
Definition at line 25 of file DyPIDConfiguration.java.
Referenced by com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.DyPIDConfiguration(), com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.getOutputMode(), and com.neuronrobotics.sdk.dyio.dypid.DyPIDConfiguration.setOutputMode().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/dyio/dypid/DyPIDConfiguration.java