
Public Member Functions | |
| configuration (double[] joints, TransformNR t) | |
| TransformNR | getTransform () |
| double[] | getJoints () |
| double | getOffsetOrentationMagnitude () |
| double | getOffsetVectorMagnitude () |
| boolean | same (configuration c) |
| String | toString () |
Private Attributes | |
| final double[] | joints |
| TransformNR | transform |
| final TransformNR | target |
Detailed Description
The Class configuration.
Definition at line 224 of file SearchTreeSolver.java.
Constructor & Destructor Documentation
◆ configuration()
| com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.configuration | ( | double[] | joints, |
| TransformNR | t | ||
| ) |
Instantiates a new configuration.
- Parameters
-
joints the joints t the t
Definition at line 247 of file SearchTreeSolver.java.
References com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.joints, and com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.target.
Member Function Documentation
◆ getJoints()
| double [] com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getJoints | ( | ) |
Gets the joints.
- Returns
- the joints
Definition at line 271 of file SearchTreeSolver.java.
References com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.joints.
Referenced by com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getTransform(), com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.inverseKinematics(), and com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.same().
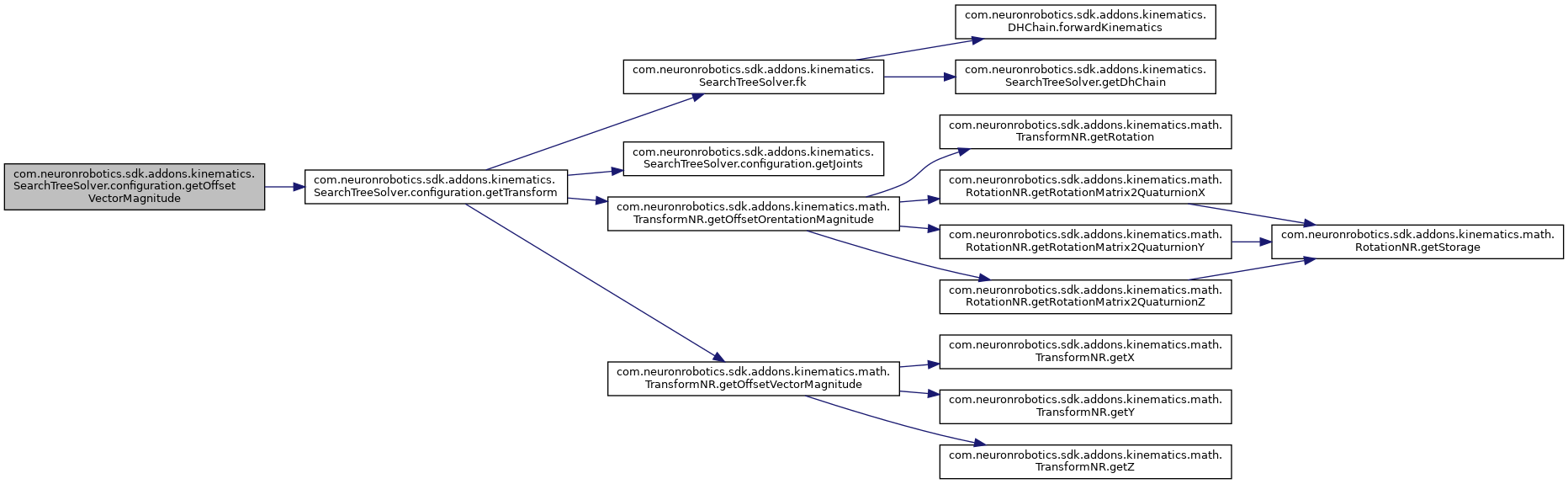
◆ getOffsetOrentationMagnitude()
| double com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getOffsetOrentationMagnitude | ( | ) |
Gets the offset orentation magnitude.
- Returns
- the offset orentation magnitude
Definition at line 280 of file SearchTreeSolver.java.
References com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getTransform().
Referenced by com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.inverseKinematics().
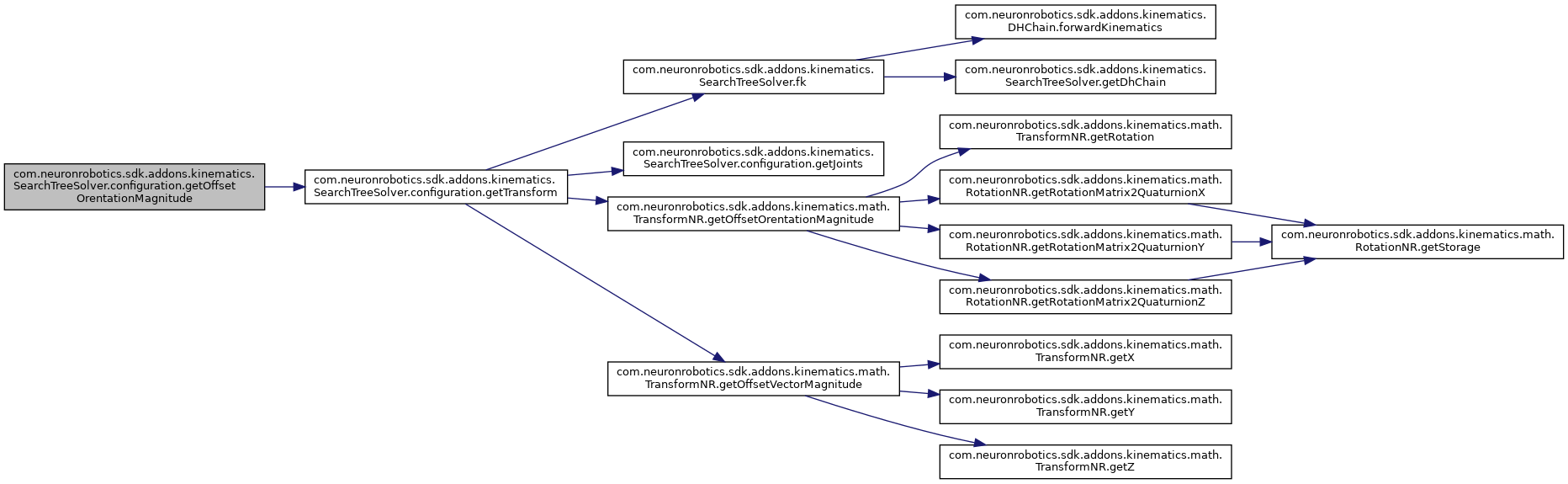
◆ getOffsetVectorMagnitude()
| double com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getOffsetVectorMagnitude | ( | ) |
Gets the offset vector magnitude.
- Returns
- the offset vector magnitude
Definition at line 290 of file SearchTreeSolver.java.
References com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getTransform().
Referenced by com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.inverseKinematics().
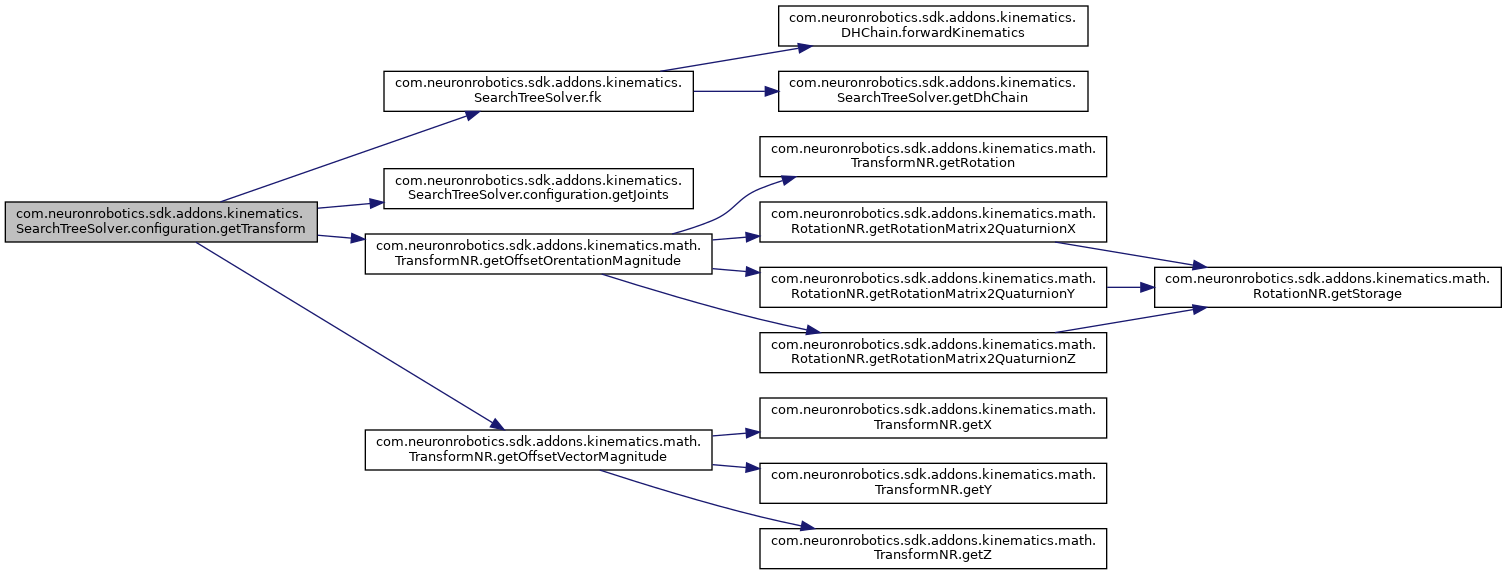
◆ getTransform()
| TransformNR com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getTransform | ( | ) |
Gets the transform.
- Returns
- the transform
Definition at line 257 of file SearchTreeSolver.java.
References com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.fk(), com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getJoints(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getOffsetOrentationMagnitude(), com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.getOffsetVectorMagnitude(), com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.target, and com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.transform.
Referenced by com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getOffsetOrentationMagnitude(), com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getOffsetVectorMagnitude(), and com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.toString().
◆ same()
| boolean com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.same | ( | configuration | c | ) |
Same.
- Parameters
-
c the c
- Returns
- true, if successful
Definition at line 301 of file SearchTreeSolver.java.
References com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getJoints().
Referenced by com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.searchTree.getBest().

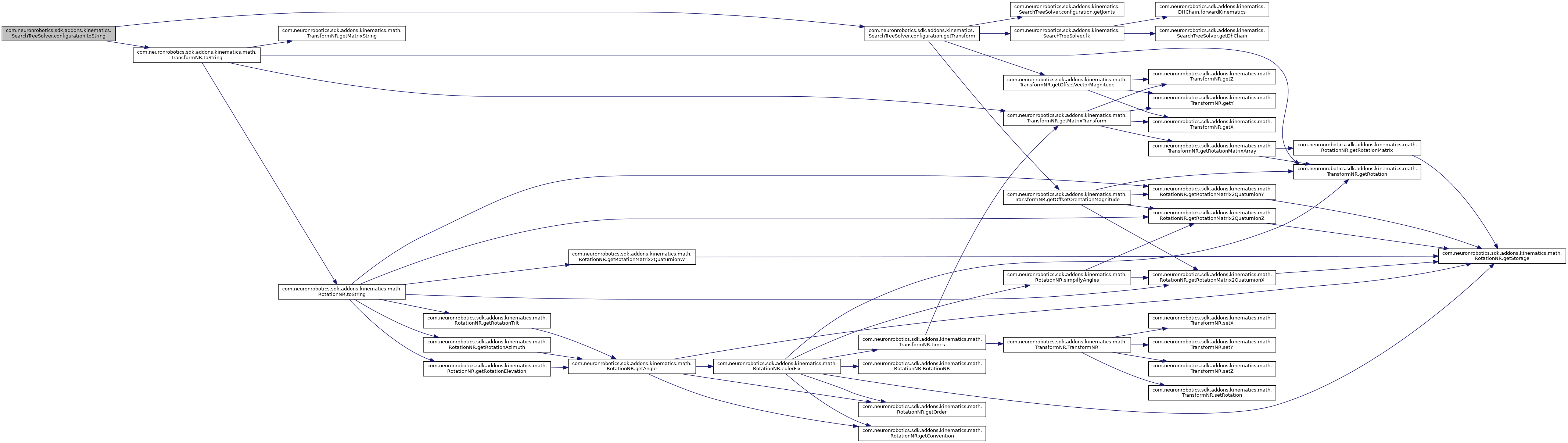
◆ toString()
| String com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.toString | ( | ) |
Definition at line 314 of file SearchTreeSolver.java.
References com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getTransform(), com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.target, and com.neuronrobotics.sdk.addons.kinematics.math.TransformNR.toString().
Member Data Documentation
◆ joints
|
private |
The joints.
Definition at line 227 of file SearchTreeSolver.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.configuration(), and com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getJoints().
◆ target
|
private |
The target.
Definition at line 233 of file SearchTreeSolver.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.configuration(), com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getTransform(), and com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.toString().
◆ transform
|
private |
The transform.
Definition at line 230 of file SearchTreeSolver.java.
Referenced by com.neuronrobotics.sdk.addons.kinematics.SearchTreeSolver.configuration.getTransform().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/kinematics/SearchTreeSolver.java