
Public Member Functions | |
| CreateArm (ServoChannel[] links) | |
| void | home () |
| void | rest () |
| void | gripClose () |
| void | gripOpen () |
| void | setShouler (double angle) |
| void | setElbow (double angle) |
| void | setWrist (double angle) |
| void | setAngles (double shoulder, double elbow, double wrist) |
| void | setAngles (double shoulder, double elbow, double wrist, float time) |
| double[] | getAngles () |
| double[] | getCartesianPose () |
| String | getCartesianPoseString () |
| void | setCartesianPose (double[] p) |
| void | setCartesianPose (double[] p, float time) |
| void | setCartesianPose (double x, double y, double orentation) |
| void | setCartesianPose (double x, double y, double orentation, float time) |
| void | setCartesianX (double x) |
| void | setCartesianY (double y) |
| void | setCartesianOrentation (double o) |
| double | GetOrentation () |
| void | setCenters (double[] centers) |
| double[] | getCenters () |
| void | setBlocking (boolean blocking) |
| boolean | isBlocking () |
| void | setScale (double scale[]) |
| double[] | getScale () |
Private Member Functions | |
| void | check (ServoChannel[] links) |
| boolean | updateCartesian (double x, double y, double orentation) |
| double | sqrt (double d) |
| double | atan2 (double y, double x) |
| double | acos (double d) |
| double | sin (double angle) |
| double | cos (double angle) |
| double | ToRadians (double degrees) |
Private Attributes | |
| double | scale [] ={1.55,1.50,-1.76} |
| double[] | positions =new double[4] |
| double[] | angles =new double[3] |
| double[] | pose =new double[3] |
| double[] | centers ={134,136,128,48} |
| boolean | blocking = false |
| double | xyThreshHold = .1 |
| double | orentThreshHold = 1 |
Static Private Attributes | |
| static final double | l1 = 6.0 |
| static final double | l2 = 3.93 |
| static final double | l3 = 4.75 |
| static final double | M_PI = Math.PI |
Detailed Description
The Class CreateArm.
Definition at line 25 of file CreateArm.java.
Constructor & Destructor Documentation
◆ CreateArm()
| com.neuronrobotics.sdk.addons.irobot.CreateArm.CreateArm | ( | ServoChannel[] | links | ) |
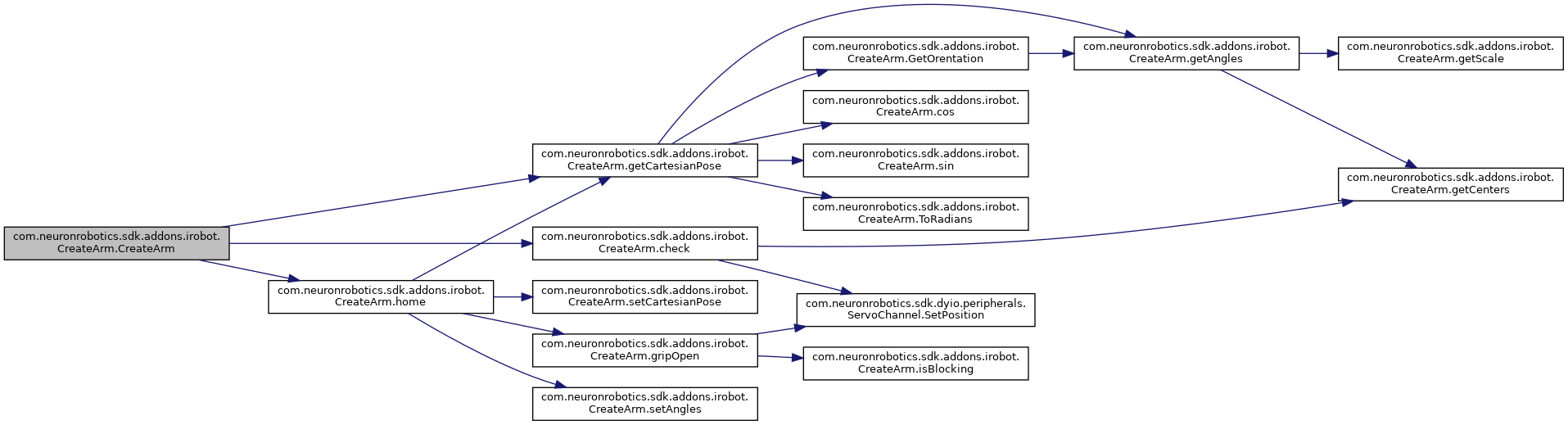
Instantiates a new creates the arm.
- Parameters
-
links this is an array of servo channel links. 0th element is shoulder 1th element is elbow 2th element is is wrist 3th element is the gripper
Definition at line 76 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.check(), com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose(), com.neuronrobotics.sdk.addons.irobot.CreateArm.home(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.pose.
Member Function Documentation
◆ acos()
|
private |
Acos.
- Parameters
-
d the d
- Returns
- the double
Definition at line 456 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().
◆ atan2()
|
private |
Atan2.
- Parameters
-
y the y x the x
- Returns
- the double
Definition at line 446 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().
◆ check()
|
private |
Check.
- Parameters
-
links the links
Definition at line 133 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.getCenters(), com.neuronrobotics.sdk.addons.irobot.CreateArm.positions, and com.neuronrobotics.sdk.dyio.peripherals.ServoChannel.SetPosition().
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.CreateArm().

◆ cos()
|
private |
Cos.
- Parameters
-
angle the angle
- Returns
- the double
Definition at line 476 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().
◆ getAngles()
| double [] com.neuronrobotics.sdk.addons.irobot.CreateArm.getAngles | ( | ) |
Gets the angles.
- Returns
- an array of angles in degrees. This should correspond to pose of the arm.
Definition at line 253 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.getCenters(), com.neuronrobotics.sdk.addons.irobot.CreateArm.getScale(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.positions.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose(), com.neuronrobotics.sdk.addons.irobot.CreateArm.GetOrentation(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles().

◆ getCartesianPose()
| double [] com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose | ( | ) |
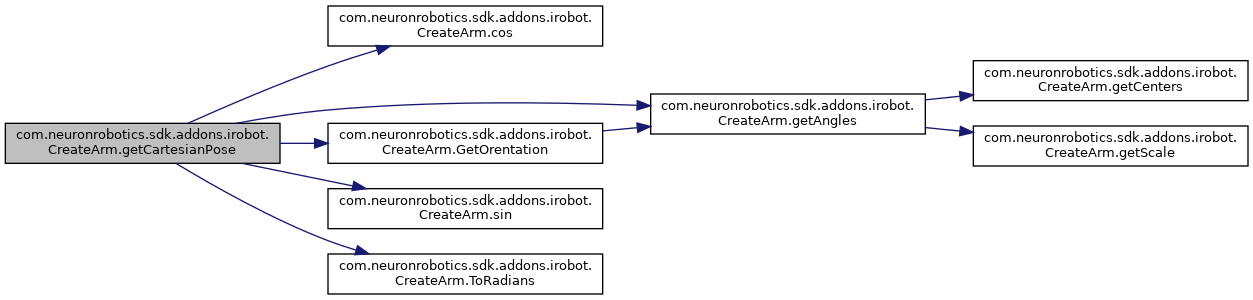
Gets the cartesian pose.
- Returns
- pose vector, X,Y,Orentation
Definition at line 268 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.angles, com.neuronrobotics.sdk.addons.irobot.CreateArm.cos(), com.neuronrobotics.sdk.addons.irobot.CreateArm.getAngles(), com.neuronrobotics.sdk.addons.irobot.CreateArm.GetOrentation(), com.neuronrobotics.sdk.addons.irobot.CreateArm.l1, com.neuronrobotics.sdk.addons.irobot.CreateArm.l2, com.neuronrobotics.sdk.addons.irobot.CreateArm.l3, com.neuronrobotics.sdk.addons.irobot.CreateArm.pose, com.neuronrobotics.sdk.addons.irobot.CreateArm.sin(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.ToRadians().
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.CreateArm(), com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPoseString(), com.neuronrobotics.sdk.addons.irobot.CreateArm.home(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.rest().
◆ getCartesianPoseString()
| String com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPoseString | ( | ) |
Gets the cartesian pose string.
- Returns
- the cartesian pose string
Definition at line 286 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.pose.

◆ getCenters()
| double [] com.neuronrobotics.sdk.addons.irobot.CreateArm.getCenters | ( | ) |
Gets the centers.
- Returns
- the centers
Definition at line 514 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.centers.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.check(), com.neuronrobotics.sdk.addons.irobot.CreateArm.getAngles(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles().
◆ GetOrentation()
| double com.neuronrobotics.sdk.addons.irobot.CreateArm.GetOrentation | ( | ) |
Gets the orentation.
- Returns
- the current approach orientation of the wrist
Definition at line 495 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.angles, and com.neuronrobotics.sdk.addons.irobot.CreateArm.getAngles().
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose().

◆ getScale()
| double [] com.neuronrobotics.sdk.addons.irobot.CreateArm.getScale | ( | ) |
Gets the scale.
- Returns
- the scale
Definition at line 550 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.scale.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.getAngles(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles().
◆ gripClose()
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.gripClose | ( | ) |
Grip close.
Definition at line 103 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.centers, com.neuronrobotics.sdk.addons.irobot.CreateArm.isBlocking(), and com.neuronrobotics.sdk.dyio.peripherals.ServoChannel.SetPosition().

◆ gripOpen()
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.gripOpen | ( | ) |
Grip open.
Definition at line 117 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.centers, com.neuronrobotics.sdk.addons.irobot.CreateArm.isBlocking(), and com.neuronrobotics.sdk.dyio.peripherals.ServoChannel.SetPosition().
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.home(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.rest().

◆ home()
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.home | ( | ) |
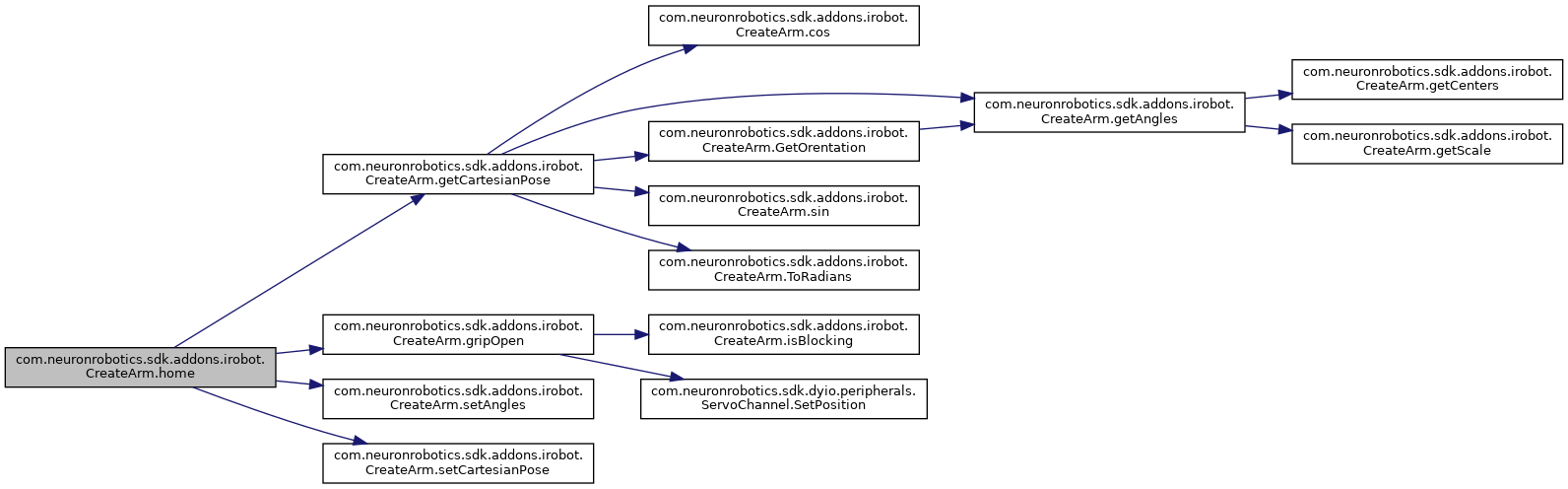
Home.
Definition at line 85 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose(), com.neuronrobotics.sdk.addons.irobot.CreateArm.gripOpen(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.CreateArm().
◆ isBlocking()
| boolean com.neuronrobotics.sdk.addons.irobot.CreateArm.isBlocking | ( | ) |
Checks if is blocking.
- Returns
- true, if is blocking
Definition at line 532 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.blocking.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.gripClose(), com.neuronrobotics.sdk.addons.irobot.CreateArm.gripOpen(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles().
◆ rest()
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.rest | ( | ) |
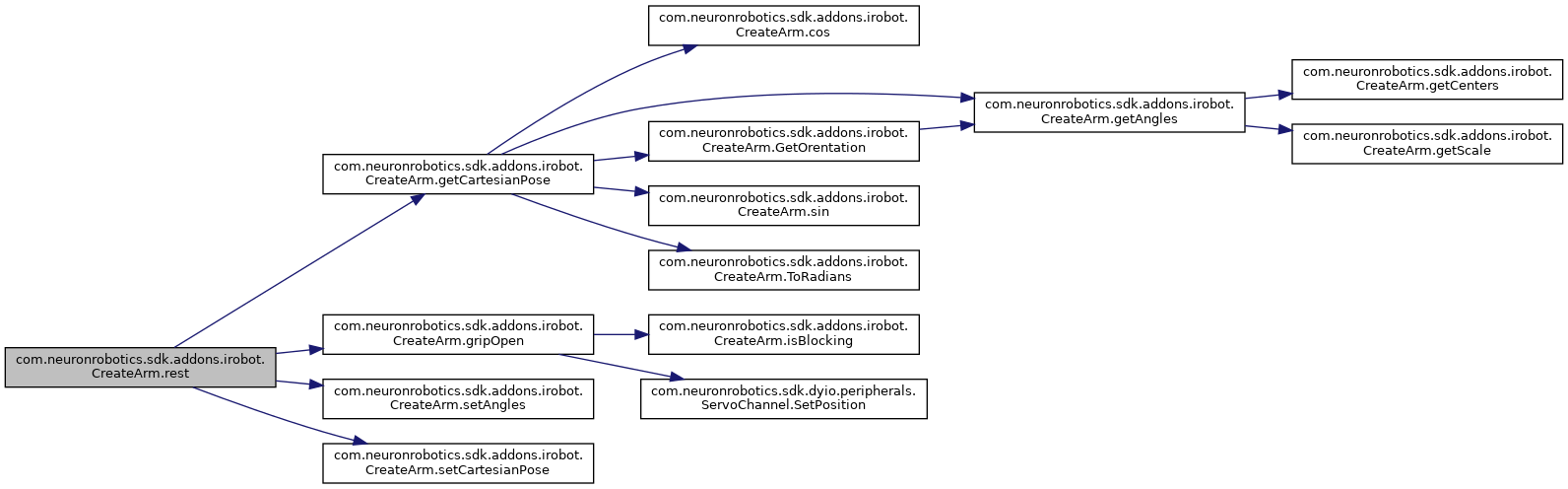
Rest.
Definition at line 94 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose(), com.neuronrobotics.sdk.addons.irobot.CreateArm.gripOpen(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().
◆ setAngles() [1/2]
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles | ( | double | shoulder, |
| double | elbow, | ||
| double | wrist | ||
| ) |
This takes angles in degrees and converts them to servo positions; Note: All zeros would be the arm completely horizontal, all links pointing out.
- Parameters
-
shoulder the shoulder elbow the elbow wrist the wrist
Definition at line 182 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.home(), com.neuronrobotics.sdk.addons.irobot.CreateArm.rest(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setElbow(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setShouler(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setWrist().
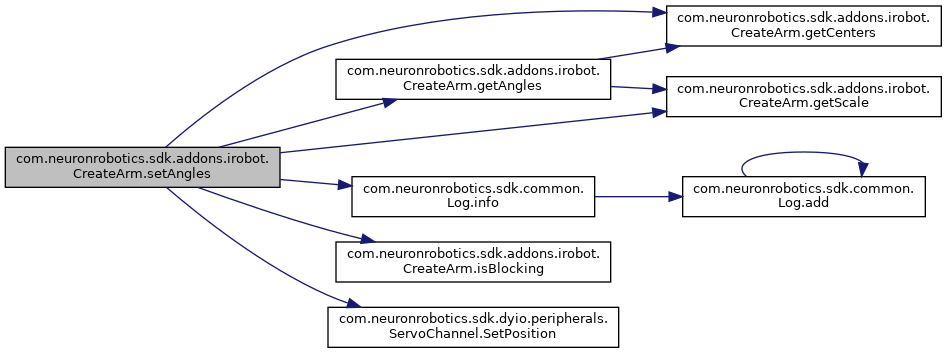
◆ setAngles() [2/2]
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles | ( | double | shoulder, |
| double | elbow, | ||
| double | wrist, | ||
| float | time | ||
| ) |
This takes angles in degrees and converts them to servo positions; Note: All zeros would be the arm completely horizontal, all links pointing out.
- Parameters
-
shoulder the shoulder elbow the elbow wrist the wrist time the time it should take for the transition to take
Definition at line 195 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.angles, com.neuronrobotics.sdk.addons.irobot.CreateArm.centers, com.neuronrobotics.sdk.addons.irobot.CreateArm.getAngles(), com.neuronrobotics.sdk.addons.irobot.CreateArm.getCenters(), com.neuronrobotics.sdk.addons.irobot.CreateArm.getScale(), com.neuronrobotics.sdk.common.Log.info(), com.neuronrobotics.sdk.addons.irobot.CreateArm.isBlocking(), com.neuronrobotics.sdk.addons.irobot.CreateArm.pose, com.neuronrobotics.sdk.addons.irobot.CreateArm.positions, and com.neuronrobotics.sdk.dyio.peripherals.ServoChannel.SetPosition().
◆ setBlocking()
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setBlocking | ( | boolean | blocking | ) |
Sets the blocking.
- Parameters
-
blocking the new blocking
Definition at line 523 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.blocking.
◆ setCartesianOrentation()
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianOrentation | ( | double | o | ) |
Sets the cartesian orentation.
- Parameters
-
o the new cartesian orentation
Definition at line 422 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.pose, and com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().

◆ setCartesianPose() [1/4]
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose | ( | double | x, |
| double | y, | ||
| double | orentation | ||
| ) |
Sets the cartesian pose.
- Parameters
-
x the x y the y orentation the orentation
Definition at line 323 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().

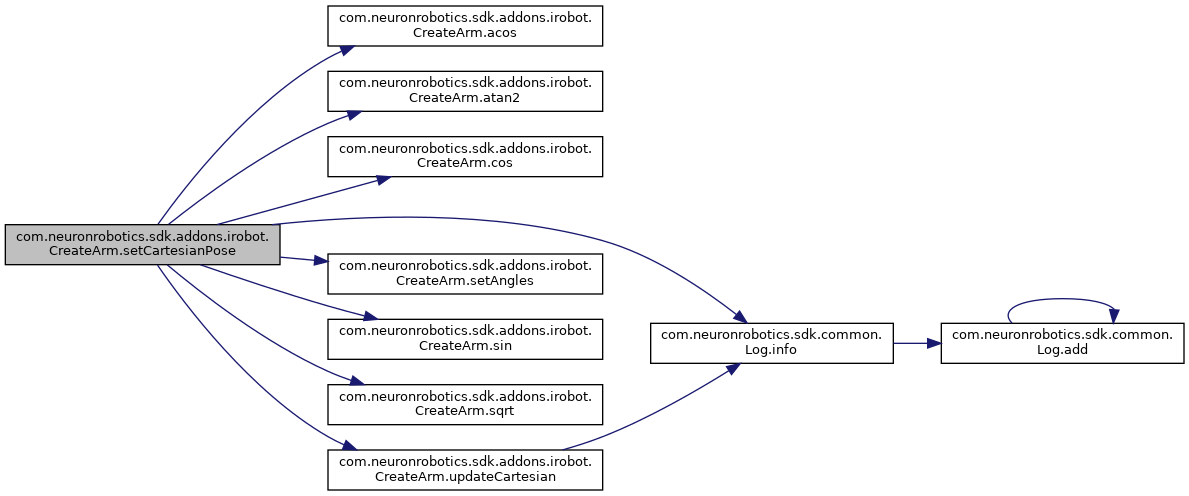
◆ setCartesianPose() [2/4]
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose | ( | double | x, |
| double | y, | ||
| double | orentation, | ||
| float | time | ||
| ) |
Sets the cartesian pose.
- Parameters
-
x the x y the y orentation the orentation time the time
Definition at line 335 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.acos(), com.neuronrobotics.sdk.addons.irobot.CreateArm.atan2(), com.neuronrobotics.sdk.addons.irobot.CreateArm.cos(), com.neuronrobotics.sdk.common.Log.info(), com.neuronrobotics.sdk.addons.irobot.CreateArm.l1, com.neuronrobotics.sdk.addons.irobot.CreateArm.l2, com.neuronrobotics.sdk.addons.irobot.CreateArm.l3, com.neuronrobotics.sdk.addons.irobot.CreateArm.M_PI, com.neuronrobotics.sdk.addons.irobot.CreateArm.pose, com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles(), com.neuronrobotics.sdk.addons.irobot.CreateArm.sin(), com.neuronrobotics.sdk.addons.irobot.CreateArm.sqrt(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.updateCartesian().
◆ setCartesianPose() [3/4]
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose | ( | double[] | p | ) |
Sets the cartesian pose.
- Parameters
-
p the new cartesian pose
Definition at line 302 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.home(), com.neuronrobotics.sdk.addons.irobot.CreateArm.rest(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianOrentation(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianX(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianY().
◆ setCartesianPose() [4/4]
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose | ( | double[] | p, |
| float | time | ||
| ) |
Sets the cartesian pose.
- Parameters
-
p the p time the time
Definition at line 312 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().

◆ setCartesianX()
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianX | ( | double | x | ) |
Sets the cartesian x.
- Parameters
-
x the new cartesian x
Definition at line 404 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.pose, and com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().

◆ setCartesianY()
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianY | ( | double | y | ) |
Sets the cartesian y.
- Parameters
-
y the new cartesian y
Definition at line 413 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.pose, and com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().

◆ setCenters()
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setCenters | ( | double[] | centers | ) |
Sets the centers.
- Parameters
-
centers the new centers
Definition at line 505 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.centers.
◆ setElbow()
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setElbow | ( | double | angle | ) |
Sets the elbow.
- Parameters
-
angle set just the elbow angle
Definition at line 161 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.angles, and com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles().

◆ setScale()
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setScale | ( | double | scale[] | ) |
Sets the scale.
- Parameters
-
scale the new scale
Definition at line 541 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.scale.
◆ setShouler()
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setShouler | ( | double | angle | ) |
Sets the shouler.
- Parameters
-
angle set just the shoulder angle
Definition at line 152 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.angles, and com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles().

◆ setWrist()
| void com.neuronrobotics.sdk.addons.irobot.CreateArm.setWrist | ( | double | angle | ) |
Sets the wrist.
- Parameters
-
angle set just the wrist angle
Definition at line 170 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.angles, and com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles().

◆ sin()
|
private |
Sin.
- Parameters
-
angle the angle
- Returns
- the double
Definition at line 466 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().
◆ sqrt()
|
private |
Sqrt.
- Parameters
-
d the d
- Returns
- the double
Definition at line 435 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().
◆ ToRadians()
|
private |
To radians.
- Parameters
-
degrees the degrees
- Returns
- the double
Definition at line 486 of file CreateArm.java.
References com.neuronrobotics.sdk.addons.irobot.CreateArm.M_PI.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose().
◆ updateCartesian()
|
private |
Update cartesian.
- Parameters
-
x the x y the y orentation the orentation
- Returns
- true, if successful
Definition at line 378 of file CreateArm.java.
References com.neuronrobotics.sdk.common.Log.info(), com.neuronrobotics.sdk.addons.irobot.CreateArm.orentThreshHold, com.neuronrobotics.sdk.addons.irobot.CreateArm.pose, and com.neuronrobotics.sdk.addons.irobot.CreateArm.xyThreshHold.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().

Member Data Documentation
◆ angles
|
private |
The angles.
Definition at line 50 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose(), com.neuronrobotics.sdk.addons.irobot.CreateArm.GetOrentation(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setElbow(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setShouler(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setWrist().
◆ blocking
|
private |
The blocking.
Definition at line 59 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.isBlocking(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setBlocking().
◆ centers
|
private |
The centers.
Definition at line 56 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.getCenters(), com.neuronrobotics.sdk.addons.irobot.CreateArm.gripClose(), com.neuronrobotics.sdk.addons.irobot.CreateArm.gripOpen(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setCenters().
◆ l1
|
staticprivate |
The Constant l1.
Definition at line 31 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().
◆ l2
|
staticprivate |
The Constant l2.
Definition at line 34 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().
◆ l3
|
staticprivate |
The Constant l3.
Definition at line 37 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose().
◆ M_PI
|
staticprivate |
The Constant M_PI.
Definition at line 41 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.ToRadians().
◆ orentThreshHold
|
private |
The orent thresh hold.
Definition at line 65 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.updateCartesian().
◆ pose
|
private |
The pose.
Definition at line 53 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.CreateArm(), com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPose(), com.neuronrobotics.sdk.addons.irobot.CreateArm.getCartesianPoseString(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianOrentation(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianPose(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianX(), com.neuronrobotics.sdk.addons.irobot.CreateArm.setCartesianY(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.updateCartesian().
◆ positions
|
private |
The positions.
Definition at line 47 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.check(), com.neuronrobotics.sdk.addons.irobot.CreateArm.getAngles(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setAngles().
◆ scale
|
private |
The scale.
Definition at line 44 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.getScale(), and com.neuronrobotics.sdk.addons.irobot.CreateArm.setScale().
◆ xyThreshHold
|
private |
The xy thresh hold.
Definition at line 62 of file CreateArm.java.
Referenced by com.neuronrobotics.sdk.addons.irobot.CreateArm.updateCartesian().
The documentation for this class was generated from the following file:
- java-bowler/src/main/java/com/neuronrobotics/sdk/addons/irobot/CreateArm.java